ШАГАЮЩИЙ АВТОНОМНЫЙ РОБОТ «ОРБИТА» ДЛЯ ИССЛЕДОВАНИЯ В ТРУДНОДОСТУПНЫХ МЕСТАХ
Конференция: LXXXII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Электротехника

LXXXII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»

ШАГАЮЩИЙ АВТОНОМНЫЙ РОБОТ «ОРБИТА» ДЛЯ ИССЛЕДОВАНИЯ В ТРУДНОДОСТУПНЫХ МЕСТАХ
ORBITA WALKING AUTONOMOUS ROBOT FOR EXPLORATION IN HARD-TO-REACH PLACES
Semyon Glukhov
Cadet, Military Academy of Aerospace Defense named after Marshal of the Soviet Union G.K. Zhukov, Russia, Tver
Аннотация. Данный робот представляет собой конструкцию гексапода. Робот-гексапод - это механическое транспортное средство, которое ходит на шести ногах. Поскольку робот может быть статически устойчивым на трех или более ногах, робот-гексапод обладает большой гибкостью в том, как он может двигаться. Если ноги становятся не пригодны для передвижения, робот все еще может ходить. Кроме того, не все ноги робота необходимы для устойчивости; другие ноги свободны для манипулирования полезной нагрузкой. На модель можно будет установить разные дополнения: бокс для доставки еды и грузов, для изучения местности, для помощи в спасении людей в экстренных ситуациях, для помощи в производстве. Также данный робот может быть выпущен как учебное пособие.
Abstract. This robot is a hexapod design. A hexapod robot is a mechanical vehicle that walks on six legs. Because the robot can be statically stable on three or more legs, the hexapod robot has great flexibility in how it can move. If the legs become unsuitable for movement, the robot can still walk. In addition, not all of the robot's legs are necessary for stability; the other legs are free to manipulate the payload. Various add-ons can be installed on the model: a box for delivering food and cargo, for exploring the area, for helping rescue people in emergency situations, and for production assistance. This robot can also be released as a training manual.
Ключевые слова: шагающий автономный робот «орбита», исследование в труднодоступных местах.
Keywords: walking autonomous robot "orbit", research in hard-to-reach places.
Мир не стоит на месте. То, что казалось невозможным 20 лет назад, сейчас является обычным явлением. Роботы, робототехника, роботизированные системы управления, – всё это стало неотъемлемой частью жизни. Сегодня уже никого не удивляет применение роботов в современном мире. Робототехника позволяет более точно и безопасно выполнять сложнейшие манипуляции и огромные вычисления, исключая при этом человеческий фактор. Основные тенденции развития робототехники на сегодняшний день – полная автоматизация и интеллектуальный алгоритм выполнения задач.
Главная задача робототехники – это конструирование и использование роботов и основанных на их применении роботизированных систем любого назначения. Робот – это своеобразный универсальный аппарат, который осуществляет механические действия, подражая человеку, занимающегося тяжелой физической деятельностью. В структуру робота прежде всего входят устройства манипуляции (механические манипуляторы). Каждый из них снабжён приводами: электрическими, гидравлическими или пневматическими. Также присутствует специальный захватывающий механизм или инструмент, средства передвижения, модуль управления приводами и движением, специальные сенсорные датчики, камеры для чувствительности робота во внешней среде и вычислительный модуль. Основными достоинствами роботов являются их универсальность, многофункциональность и быстрая адаптация для решения новых операций. Они освобождают человека от опасной работы, всегда выполняют задания точно и вовремя; могут сделать гораздо больше, чем человек за то же время, они никогда не устают; могут работать в труднодоступных местах, им не нужна пища, отпуск, а только энергия.
Универсальная робототехническая база, которую можно будет использовать для решения различных заданий в отраслях. Данный робот представляет собой конструкцию гексапода, обусловленную опорно-двигательной системой муравья. Рис. 1
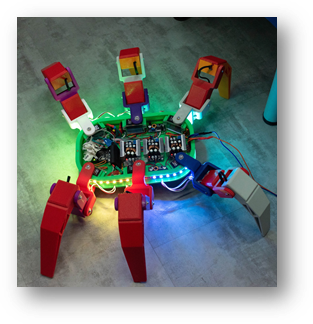
Рисунок 1. Конструкция гексапода
Робот-гексапод - это механическое транспортное средство, которое передвигается на шести ногах. Поскольку робот может быть статически устойчивым на трех или более ногах, робот-гексапод обладает большой гибкостью в том, как он может двигаться. Если одна или две ноги станут не пригодны для передвижения, робот все еще может ходить, не все ноги необходимы для устойчивости; другие ноги свободны для манипулирования полезной нагрузкой.
Своими шестью лапками муравьи выполняют множество работ. У них есть особенность расставлять конечности шире своего тела, за счет чего насекомым удается переносить предметы в несколько десятков раз тяжелей их собственного веса. Это может быть груз в 50 раз тяжелее веса муравья.
При изучении роботов, представленных на рынке, я обратил внимание на ряд проблем, присущих данным моделям. Основными проблемами являются высокая стоимость, малая мощность, небольшое время работы, хлипкость конструкции, отсутствие в функционале универсальности применения. При создании своей модели я постарался максимально решить данные проблемы.
При реализации практической части проекта был разработан шестиногий шагающий робот с платформой в виде равностороннего шестиугольника, в углах которого располагаются трехзвенные конечности, состоящие из промежуточного звена, бедра и голени. Введены две системы координат: система координат платформы и система координат конечности. Рис.2 и Рис.3
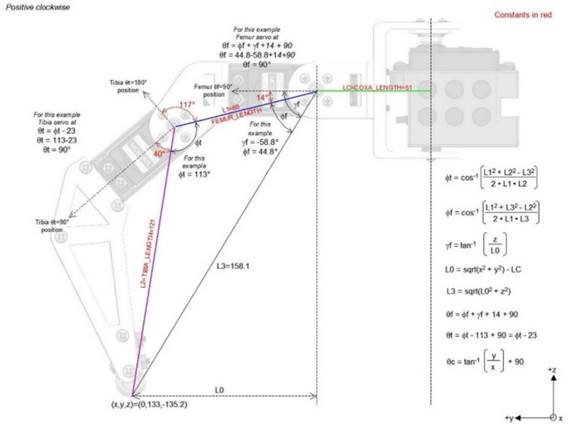
Рисунок 2. Схема
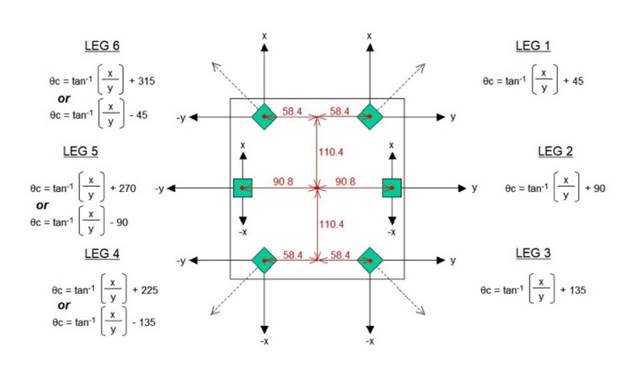
Рисунок 3. Схема
Центр первой из них расположен в центре платформы робота, плоскость совпадает с плоскостью платформы, ось OX направлена в точку прикрепления первой ноги, ось OY направлена вверх относительно поверхности перпендикулярно платформе (предполагаем, что робот не переворачивается).
Центр второй из них расположен в точке прикрепления ноги, плоскость также совпадает с плоскостью платформы, ось OZ направлена от центра платформы к точке прикрепления ноги.
Для генерации походки разобьем конечности на две группы: с четными и нечетными номерами. В то время как одна группа ног располагается в воздухе, что соответствует фазе переноса, другая группа ног находится на поверхности, то есть в фазе опоры. Такая походка соответствует насекомым (например, муравьям и мухам), поэтому называется инсектовидной. Каждая фаза длится одинаковое время.
Рассмотрим шаговый цикл ноги гексапода. Траектория конечности в локальной системе координат представляет собой замкнутую кривую. Данную кривую можно условно разделить на две части, которые соответствуют фазе переноса ноги и фазе опоры ноги. При переносе конечности из одной точки в другую выбор траектории может быть осуществлен произвольным образом, так как голень находится в свободном движении. В данной работе в качестве траектории переноса ноги используется полуэллипс. В фазе опоры нога движется по опорной поверхности вдоль прямой в направлении, обратном движению всего механизма.
Конечность состоит из 3-х частей (таз, бедро, голень), в каждой из которой установлен мотор, который приводит в действие ту или иную часть. Корпус выполнен в форме овала. По внешней стенки корпуса наклеена светодиодная лента для индикации действий робота (габариты). Все детали робота герметичны. Рис.4
|
|
|
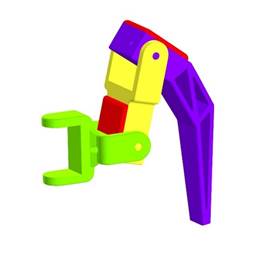
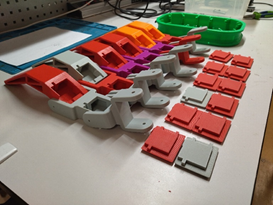
Рисунок 4. Детали робота
Проектирование робота происходило в системе трёхмерного моделирования Компас 3D. Рис.5
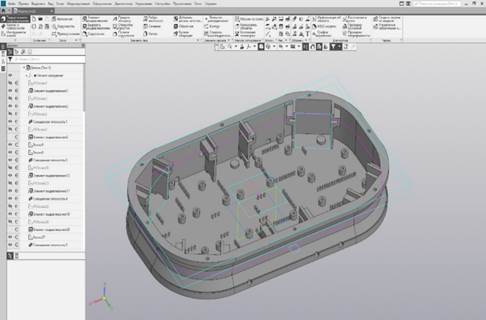
Рисунок 5. Проектирование
Для начала была разработана одна конечность, для испытания. Детали были напечатаны на FDM 3D принтере. Был использован PETG пластик для изготовления, так как он имеет более подходящие характеристики.
После успешного испытания изготовленной конечности, был разработан корпус робота, в котором находится электроника. Принципиальная электрическая схема представлена на Рис.6

Рисунок 6. Принципиальная электрическая схема
Основное средство программной реализации – язык программирования C++ с использованием среды разработки Arduino IDE. Рис. 7 Алгоритм написан с использованием обратных кинематических (IK) вычислений – то есть положения сервопривода вычисляются на основе желаемых координат x,y,z кончика каждой ноги. Знание нескольких констант — длин таза, бедра, голени и углов смещения между осью сервоприводов и структурой — позволяет рассчитать желаемые углы сервопривода для всех возможных координат x, y, z.
Каждая нога монтируется под разным углом, и смещения каждой ноги от центра тела различны, поэтому рассчитанный угол таза варьируется для каждой ноги. Для управления роботом использовался геймпад от игровой приставки.
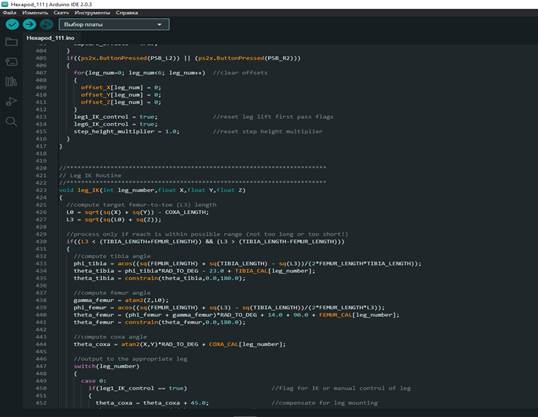
Рисунок 7. Программная реализация
При испытания, робот полностью выполнял все ожидаемые функции, а это – ходьба, работоспособность подсветки, передвижение по пересечённой местности, по гладкой поверхности.
Испытание проходили, как в здании, так и на улице, робот выполнил все поставленные задачи в полном объеме.
Но во второй модели был выявлен небольшой недостаток – это слишком высокое потребление энергии, свыше 15 Ампер.
На основании результатов проведенных исследований и разработки, можно сделать следующие выводы:
1) Робот может быть оснащён любой полезной нагрузкой, на модель можно будет установить разные дополнения: бокс для доставки еды и грузов, для изучения местности, для помощи в спасении людей в экстренных ситуациях, для помощи в производстве.
2) Также данный робот может быть выпущен как учебное пособие.
3) Гексаподы способны обеспечивать заданный уровень безопасности объекта или выполнять разведку на местности.
4) Встроенное ПО позволяет дополнять его функционал по усмотрению пользователя.
5) Роботизированной технике не составит труда провести осмотр прилегающей территории в результате этого установить карту ближайшей местности, исследовать подземелья или заброшенные шахты, добыть образцы грунта и многое другое.
