Проектирование электронной части системы стабилизации элемента робототехнического манипулятора
Конференция: V Международная заочная научно-практическая конференция "Научный форум: технические и физико-математические науки"
Секция: Машиностроение и машиноведение

V Международная заочная научно-практическая конференция "Научный форум: технические и физико-математические науки"

Проектирование электронной части системы стабилизации элемента робототехнического манипулятора
Design of the electronic part of the robotic manipulator element stabilization system
Vladimir Masyuk
phD, assistant professor, Department of Mechatronics and Robotics, Bauman Moscow State Technical University, Kaluga Branch, Russia, Kaluga
Semen Kanibolotskiy
student, Department of Mechatronics and Robotics, Bauman Moscow State Technical University, Kaluga Branch, Russia, Kaluga
Аннотация. Поставлена проблема разработки электронной системы управления звеном робота манипулятора. Используется микроконтроллер Atmega. Проектируется H-мост с широким диапазоном изменения скважности. Поученная система является часть экспериментального стенда по исследованию динамики робототехнического звена.
Abstract. The problem of developing an electronic control system for the unit of the robot manipulator is posed. The microcontroller Atmega is used. The H-bridge with a wide range of change in the duty cycle is being designed. The designed system is part of an experimental stand for studying the dynamics of the robotic unit.
Ключевые слова: робототехника, H-мост, электронная схема управления, робототехнический модуль.
Keywords: Robotics, H-bridge, electronic control circuit, robotic module.
Системой динамической стабилизации на основе роботехнического манипулятора с вращательной кинематической парой (Сервопривод) обобщенно называют привод, который имеет отрицательную обратную связь по моменту, положению и другим параметрам. Данные приводы широко используются в промышленности, поскольку удовлетворяют основным требованиям: точное управление параметрами движения, такими как скорость момент, угол поворота, линейное позиционирование. Сервопривод является сложной технической системой и разработка и проектирование таких систем включает в себя следующие этапы: обработка данных с энкодера (датчика обратной связи), разработка микроконтроллерной системы управления, разработка силовых электронных ключей управления приводами, согласование энергетических характеристик, а также попутно решаются частные задачи, которые возникают на этапах разработки [4]. Сейчас, в основном, используются сервоприводы на основе бесколлекторных двигателей постоянного тока, как обладающие лучшим набором технических параметров, но в макетных или экспериментальных разработках используются редко по причине высокой стоимости системы и сложности обеспечения управления по углу поворота.
В данной работе рассмотрены некоторые вопросы проектирования робототехнического манипулятора с одной вращательной кинематической парой. Кинематическая схема представлена на рис.1.
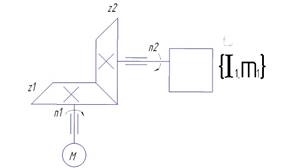
Рисунок 1. Кинематическая схема проектируемого устройства
Следующим этапом исследования является проектирование системы обработки информации, поступающего с абсолютного энкодера. Были поставлены следующие задачи: произвести анализ требуемой разрядности датчика, оценить необходимое быстродействие микроконтроллера (МК) для обработки информации, спроектировать схему согласования уровней напряжений датчика и МК [5–8].
Исходя из задачи проектирования элемента робототехнического звена в виде поворотного элемента с допустимыми линейными скоростями не выше 1 м/с и точностью позиционирования в угловых координатах не хуже 1° в качестве абсолютного энкодера был выбран прибор Koyo TRD-NA1024NW с разрешением 10 бит [3]. Угловое разрешение системы:
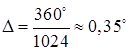 (1)
(1)
Допустимые угловые скорости энкодера – 3000 об/мин, что при плече манипулятора до 1 м полностью удовлетворяет заданию.
Основные характеристики энкодера: разрешающая способность: N=10 бит, потребляемый ток: менее 70 мА; напряжение питания: от 10.8 до 26.4 В; максимальная частота отклика: 20 кГц; остаточное напряжение 0.4–1.5 В.
Таким образом, следующим шагом является выбор обрабатывающего контроллера. Оценим требования к нему: скорость обработки информации с датчика не хуже чем
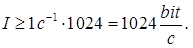 (2)
(2)
Быстродействие контроллера для операций управления приводом: не хуже, чем время реакции системы на поворот привода на единицу измерения. Энкодер установлен на выходном тихоходном валу мотор-редуктора. Т.е., при повороте системы на величину  и с учетом коэффициента передачи редуктора
и с учетом коэффициента передачи редуктора  при разрядности счетчика 8bit имеем необходимую минимальную граничную частоту работы МК:
при разрядности счетчика 8bit имеем необходимую минимальную граничную частоту работы МК:
 (3)
(3)
Далее нужно учитывать, что за данный такт времени МК должен успеть произвести расчет алгоритма управления. Исходя из опыта исследования работы подобных систем, частота работы МК должна быть по меньшей мере в 2-5 раз больше минимальной (в случае простейших алгоритмов управления), чтобы обеспечить запас производительности для расчетов, учета прерываний и др. Учитывая данные оценки, рабочая частота контроллера должна лежать в пределах 2–10МГц. Анализ технического задания показал, что для проекта целесообразно использовать контроллер на основе ATmega 2560 для предварительной отладки системы управления (рабочая частота 16 МГц) и, для окончательного проекта, позволяющего отрабатывать сложные сценарии управления контроллер на основе STM32 (тактовые частоты 84–100 МГц) [1].
В рамках данной работы исследуются характеристики абсолютного энкодера Koyo TRD-NA1024NW, способ подключения энкодера к микроконтроллеру и считывания с него данных. Были поставлены текущие задачи исследования: исследование характеристик энкодера Koyo TRD-NA1024NW, разработка электронной схемы для подключения энкодера Koyo TRD-NA1024NW к микроконтроллеру с помощью отдельной платы.
При работе энкодер выдает данные в виде кода Грея, а поскольку информация, выраженная в Грей-коде, имеет кодированный характер, не несущей реальной числовой информации, перед дальнейшей обработкой данные должны быть сперва преобразованы в стандартный бинарный код. Осуществляется это при помощи преобразователя кода (декодера Грей-Бинар), который к легко реализуется с помощью цепочки из логических элементов XOR как программным, так и аппаратным способом. На данном этапе разработки воспользуемся программным методом с помощью микроконтроллера.
Рассмотрим проектирование схемы согласования и подключение к ПК и к пакету Matlab [2]. Изначально рассматривалось промышленное применение робототехнического устройства, поэтому необходимым условием является полная гальваническая развязка по питанию. Заодно проектируемая схема должна обеспечить согласование уровней питания энкодера (12В) и МК (5В). Электрическая принципиальная схема для одного канала приведена на рис. 2.
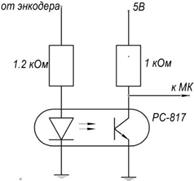
Рисунок 2. Преобразователь уровня сигнала с опторазвязкой
Для разработки электрической принципиальной схемы была использована программа fritzing, которая позволяет быстро построить принципиальную схему устройства, создать ее представление в виде соединения макетов элементов, разработать печатную плату для ее дальнейшего изготовления и импортировать схему в какие-либо другие программные обеспечения для продолжения работы с ней. Следующий этап работы – проектирование мощной ключевой схемы управления приводом на основе Н-моста. Требование: обеспечить гальваническую развязку по входу и по управлению ключами и смоделировать работу системы при релейном управлении при f=0.
В результате была разработана схема управления приводом на основе H-моста (рис. 3). Особенностью данной схемы является возможность работы при коэффициентах заполнения ШИМ  , что недостижимо при типовой схеме включения ИМС IR2110 с бутстрепным питанием. Такой результат достигается использованием независимых источников питания для каждого из ключей. Практические испытания показали работоспособность схемы без радиаторов на силовых транзисторах при токах до 10 A и частоте ШИМ до 10 кГц.
, что недостижимо при типовой схеме включения ИМС IR2110 с бутстрепным питанием. Такой результат достигается использованием независимых источников питания для каждого из ключей. Практические испытания показали работоспособность схемы без радиаторов на силовых транзисторах при токах до 10 A и частоте ШИМ до 10 кГц.
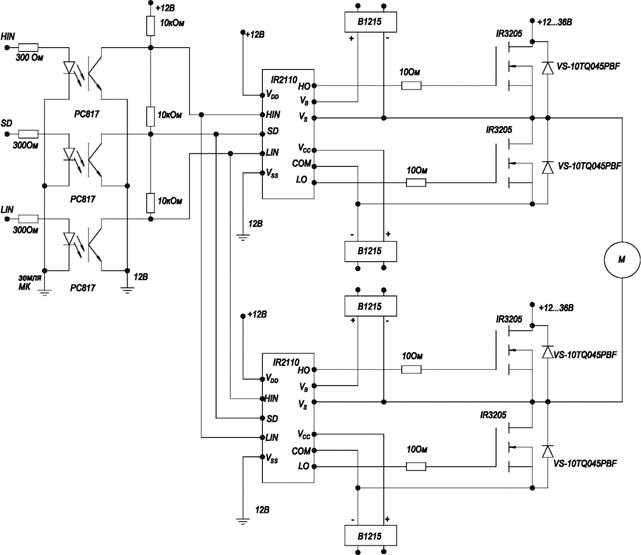
Рисунок 3. Н-мост управления приводом
Выводы. Получены результаты 3D моделирования, произведена трансляция модели в SimMechanics, получены результаты натурных испытаний электропривода и построена его упрощенная математическая модель. На данном этапе исследований также были решены следующие задачи: исследованы возможности абсолютных энкодеров, исследованы характеристики энкодера Koyo TRD-NA1024NW, исследованы способы преобразования кода Грея в двоичный код и разработан программный код для платформы Arduino, разработана схема подключения энкодера Koyo TRD-NA1024NW к микроконтроллеру, разработана мощная ключевая схема управления приводом на основе Н-моста. В ходе исследования была показана возможность применения комбинированного электропривода, включающего: угловой редуктор в задачах робототехники. Разработанная математическая модель может быть использована для проектирования различного рода робототехнических устройств, особенностью которых являются: высокие нагрузки, скорость, точность выполнения движений. В рамках исследования была установлена область параметров системы необходимая для составления корректного технического задания и выбора необходимых компонент.
