ПЛАНИРОВАНИЕ ТРАЕКТОРИИ ПОЛЁТА КВАДРОКОПТЕРА В РАЗЛИЧНЫХ РЕЖИМАХ ПОИСКА БОРЩЕВИКА СОСНОВСКОГО
Конференция: XLVII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Информатика, вычислительная техника и управление

XLVII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»

ПЛАНИРОВАНИЕ ТРАЕКТОРИИ ПОЛЁТА КВАДРОКОПТЕРА В РАЗЛИЧНЫХ РЕЖИМАХ ПОИСКА БОРЩЕВИКА СОСНОВСКОГО
THE PLANNING THE FLIGHT PATH OF A QUADROCOPTER IN VARIOUS SEARCH MODES FOR THE SOSNOVSKY HOGWEED
Anton Kordyukov
Candidate of Technical Sciences, Associate Professor, Rybinsk State Aviation Technical University named after P. A. Solovyov, Russia, Rybinsk
Svetlana Fomenko
Candidate of Economic Sciences, Associate Professor, Rybinsk College of MUBiNT, Russia, Rybinsk
Roman Fomenko
Candidate of Technical Sciences, Associate Professor, Rybinsk State Aviation Technical University named after P. A. Solovyov, Russia, Rybinsk
Аннотация. Показано, что существующие технологии позволяют уменьшить распространение опасного растения – борщевик Сосновского путем его переработки в биотопливо или уничтожением гербицидами. Предложен алгоритм работы программного аппарата системы, отражающий этапы принятия решений и алгоритм построения траектории полёта дрона в различных режимах поиска.
Abstract. It is shown that the existing technologies allow to reduce the spread of a dangerous plant-Sosnovsky's hogweed by processing it into biofuels or destroying it with herbicides. An algorithm for the operation of the system's software apparatus reflecting the stages of decision-making and an algorithm for constructing the drone's flight path in various search modes is proposed.
Ключевые слова. борщевик Сосновского; переработка биомассы в биотопливо; траектория полета дрона.
Keywords: Sosnovsky's hogweed; processing of biomass into biofuels; the flight path of a drone.
Борщевик Сосновского - искусственно выведенный вид. Основная угроза борщевика Сосновского в том, что он способен вызвать ожоги на теле человека. Размножение и распространение борщевика трудно поддается контролю. Растения быстро дичают, вырастают плотными зарослями по обочинам дорог, в низинах и на пашнях, вытесняя полезные растения, разрушая сложившиеся биоценозы, и как следствие, нарушая экологический баланс. Однако данное растение можно использовать с экономической и социальной пользой. Борщевик Сосновского, как исходное сырье для производства биотоплива, обладает рядом преимуществ по сравнению со специально культивируемыми культурами. Во – первых, сок борщевика в период от цветения до бутонизации содержит от 17 до 30% сахара [1]. Во – вторых, данное растение практически не требует затрат на возделывание и после посадки не нуждается в уходе. Необходимо создать техническую систему, выполняющую сбор информации, поиск борщевика дронами, определение биомассы, определение дальнейших действий по переработке или уничтожению борщевика гербицидами. Алгоритм работы программного аппарата системы, отражающий этапы принятия решений, показан на схеме (рисунок 1) [2, с. 41].
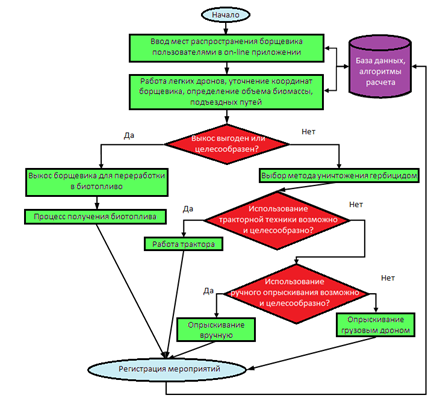
Рисунок 1. Алгоритм работы программного аппарата системы, отражающий этапы принятия решений
Современные технологии позволяют эффективно проводить мониторинг территорий с целью выявления распространения борщевика [3-5]. При решении задачи поиска и оценки районов распространения борщевика можно выделить следующие вероятные цели полёта:
- Достижение заданных координат, полученных из приложения ранее, с целью проверки и уточнения расположения борщевика.
- Первоначальный облёт обширной территории на большой высоте по оптимальной траектории с целью поиска и фиксации зарослей борщевика, отделение его от остальной поросли, выделение перспективных районов.
- Облёт перспективных районов с целью поиска и обнаружения борщевика по заранее построенной оптимальной траектории.
Постановка задачи построения оптимального пути облёта территории будет разниться в зависимости от вышеуказанных целей полёта. Построение оптимальной траектории полета должно быть основано на использовании оптимизационной функции, ограничениями которой будут выступать следующие факторы:
- Время полёта квадрокоптера (определяется его характеристиками).
- Высота подъёма квадрокоптера для уверенного (до 90-95%) распознавания борщевика.
- Высота обзора, для определения перспективных участков (законами Российской Федерации ограничивается 200 метрами, без получения разрешения на полёт).
- Технические характеристики квадрокоптера: разрешение камеры, мощность винтов, емкость батареи, а также его условная стоимость.
- Погодные условия: сила ветра, его направление, облачность и т.п.
- Дальность устойчивой связи с управляющим компьютером.
- Состояние борщевика в зависимости от времени года.
Работа по обнаружению борщевика будет строиться в следующей последовательности:
- Предварительный обзор с максимально возможной высоты перспективной области с фиксацией на фото и видео.
- Возврат к рабочей станции и передача материалов на компьютер.
- Обработка изображений, распознавание и выделение перспективных областей для поиска борщевика с помощью нейронных сетей.
- Построение оптимальной траектории полёта квадрокоптера с целью отработки наибольшей площади выделенных перспективных участков на высоте достаточной для уверенного распознавания борщевика.
- Вылет и отработка полётного задания с возможностью его корректировки в полёте.
- Возврат и обработка полученных фото и видео материалов перспективных областей.
- Определение экономической целесообразности переработки борщевика.
Как видим из предложенного выше алгоритма работы по обнаружению зарослей борщевика, возникает ряд оптимизационных задач, которые будут реализовываться на различных этапах выполнения работ.
При решении задачи достижении заданных координат, задача определения полётного задания становиться достаточно тривиальной и включает в себя следующие этапы:
1. Подъём на заданную высоту, не препятствующую траектории движения квадрокоптера.
2. Достижение заданных координат.
3. Фиксация (фотографирование) указанного места.
4. При необходимости снижение для получения более детального снимка.
5. Возврат на заданную высоту.
6. Возврат на стартовую позицию.
При решении задачи облёта территории по заданной траектории, необходимо выбрать стратегию построения траектории полёта БЛА (спираль, змейка, перемещение с облётом заданных координат и т.п.), а затем выполнить построение оптимальной траектории с учётом всех ограничений, накладываемых на полёт. Фактически мы имеем задачу построения пути движения точки в пространстве. Для этого необходимо определить допустимое пространство поиска с заданной дискретизацией (например, на равные прямоугольники) и наложить на него необходимые пространственные ограничения. Всё это позволит определить свободное для перемещения пространство и занятые по тем или иным причинам области. Затем задаём общую стратегию полёта (определённую кривую или прямую) движения. Далее с помощью одного из алгоритмов оптимизации пути на графах находим оптимальную траекторию внутри заданной тратегии. Для этого могут использоваться следующие алгоритмы:
1) Алгоритм поиска А* (прима) Определяет маршрут с наименьшей стоимостью между начальной и целевой точками. Просматриваются все возможные пути между начальной и целевой точкой. Особенностью является то, что учитывается пройденное расстояние до каждой точки. Алгоритм А* всегда сходится при наличии свободного пути. Однако может быть затратен с точки зрения обсчёта всех допустимых состояний пространственного расположения БЛА.
2) Алгоритм Дейкстры. Как в А*, строится кратчайший путь дерева с выбранной исходной точкой в качестве корня. Поддерживаются два комплекта, первый набор точек, включенных в кратчайшее дерево пути и точки второго набора, являются кандидатами, но еще не включены в дерево кратчайшего пути. На каждой итерации ведётся поиск точки из второго набора, обеспечивающей минимальное расстояние от исходной. Время сходимости алгоритма пропорциональной числу препятствий на карте.
3) Jump Point Search (прыжковые точки) Улучшенная версия алгоритма поиска пути A*. Отличие состоит в том, что ускорение поиска пути достигается благодаря «перепрыгиванию» точек, которые исключаются из расчёта. Такие точки описываются двумя правилами выбора соседей в процессе рекурсивного поиска: отдельное правило обработки при прямолинейном движении без изменения высоты и отдельное – для изменения с изменением высоты.
