Статья:




Разработка программного обеспечения для исследования параметров робота манипулятора МП-9С
Конференция: II Студенческая международная научно-практическая конференция «Молодежный научный форум»
Секция: Технические науки
Выходные данные
Потапов А.А., Федоров А.А. Разработка программного обеспечения для исследования параметров робота манипулятора МП-9С // Молодежный научный форум: электр. сб. ст. по мат. II междунар. студ. науч.-практ. конф. № 1(2). URL: https://nauchforum.ru/archive/MNF_interdisciplinarity/1(2).pdf (дата обращения: 26.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

II Студенческая международная научно-практическая конференция «Молодежный научный форум»
Разработка программного обеспечения для исследования параметров робота манипулятора МП-9С
Потапов Андрей Алексеевич
студент, МГТУ им. Н.Э. Баумана (национальный исследовательский университет),филиал в г. Калуга, РФ, г. Калуга
Федоров Александр Александрович
студент, МГТУ им. Н.Э. Баумана (национальный исследовательский университет),филиал в г. Калуга, РФ, г. Калуга
Масюк Владимир Михайлович
научный руководитель, канд. физ.-мат. наук, доцент МГТУ им. Н.Э. Баумана (национальный исследовательский университет) филиал в г. Калуга, РФ, г. Калуга
Лапиков Антон Леонидович
научный руководитель, ассистент МГТУ им. Н.Э. Баумана (национальный исследовательский университет), филиал в г. Калуга, РФ, г. Калуга
В настоящее время существует проблема, связанная с обучением студентов – необходимо осуществить перевод старого оборудования на современную элементную базу и использовать новые технические решения. Необходимо создание единой среды для управления роботом, проведение исследований, связанных с динамикой механизма, апробации теоретической модели. В данной работе рассматривается манипулятор МП-9С. Этот манипулятор имеет высокое распространение к промышленности, но его эксплуатация требует большого количество вспомогательных программ.
Отсюда следуют задачи:
· Построение массо-габаритной модели в solidworks
· Построение математической модели в среде simulink
· Съем данных со стенда, разработка ПО для съема и обработки данных
· Интерпретация данных.
Подробно распишем алгоритм создания модели и разработки ПО для исследования и управления роботом-манипулятором МП-9С:
1. Создание 3D модели механической системы в Solidworks
На начальном этапе было проведено создание трехмерной модели механизма в пакете SolidWorks (рисунок 1).
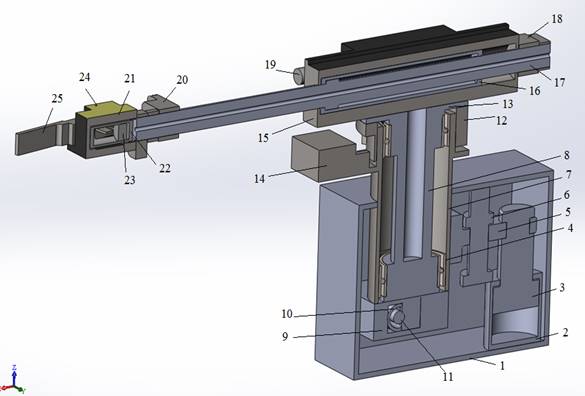
Рисунок 1. 3D- Модель манипуляционного механизма
1 – Корпус; 2 – цилиндр подъема; 3 – шток подъема; 4 – подшипники;5 – кронштейн; 6 – геркон; 7 – втулка; 8 – вал; 9 – корпус пневмоцилиндра поворота; 10 – цилиндр поворота; 11 – шток ; 12 – упор; 13 – фланец; 14 – демпфер; 15 – корпус пневмоцилиндра; 16 – цилиндр выдвижения; 17 – шток; 18 – задний упор
Разработанная 3D модель, учитывающая конструкционные особенности механической системы передает движение всех деталей механизма и сохраняет все физические свойства системы. Данная модель необходима для получения адекватной математической модели и ее дальнейшего экспорта в среду моделирования MATLAB и создания интерфейса.
2. Создание интерфейса управления манипулятором
Интерфейс управления манипулятором МП-9С реализован в среде MatLab. Он имеет восемь кнопок для управления роботом в ручном режиме, а именно движения: вправо, влево, вперед, назад, вверх, вниз, сжать, разжать. Также есть кнопка сброса, которая обнуляет переменную, поданную по COM-порту в микроконтроллер. Предусмотрено наличие автоматического управления с помощью кнопки «цикл». Также в разработанном интерфейсе присутствует возможность построения графиков скорости, ускорения и перемещения (рисунок 2, 3, 4). Которые строятся по полученным с энкодера данным, переданным по интерфейсу связи RS-232.
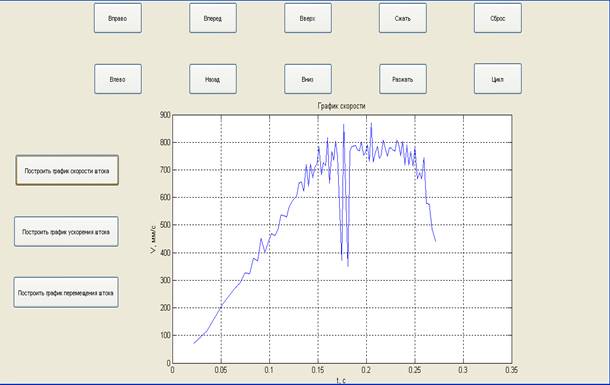
Рисунок 2. График скорости манипулятора
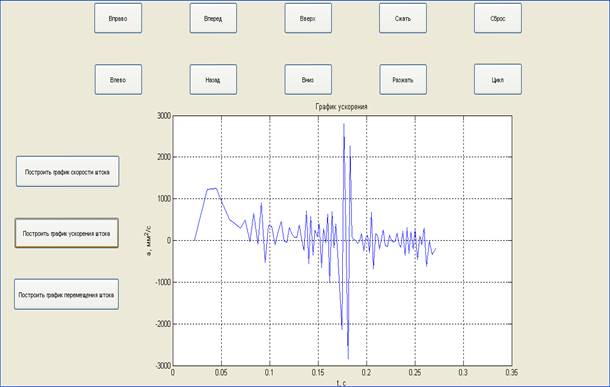
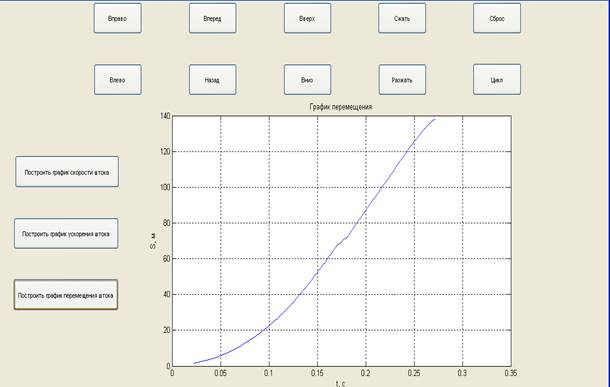
Рисунок 4. График перемещения манипулятора
3. Верификация полученной модели
Для экспериментального подтверждение полученных результатов, была использована микроконтроллерная система управления манипулятором МП-9С, оснащенная аппаратным датчиком-энкодером для снятия характеристик движения штока выдвижения.
При проведении экспериментов был получен график перемещения выдвижного штока (рисунок 5).
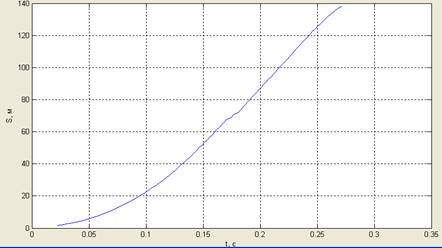
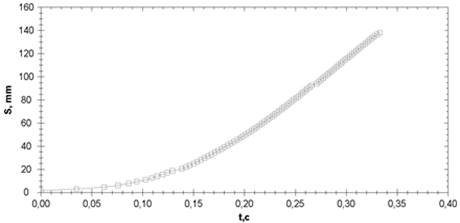
Рисунок 5. График перемещения штока, полученный экспериментально
В реальной модели шток перемещается на 150мм за 0,35с. В математической модели перемещение происходит за 0,4с. Погрешность составляет 0,05с, причиной являются недостаточно точные параметры пневмоцилиндра.
Подводя итоги работы можно выделить выполнения следующих задач: построение массово-габаритной модели в Solidworks, разработка интерфейса для управления манипулятором, а так же была проведена верификация модели, для уточнения результатов. В последующих статьях будет произведен подробный разбор построения математической модели в Simulink, а так же решения остальных задач.
Список литературы:
1. Акчурин Э.А., Тарасов В.Н. Методические указания к лабораторным работам "Программирование в системе MATLAB", использование GUI. − Самара, 2012. − 31 с.
2. Булгаков А.Г., Воробьев В.А. Промышленные роботы. Кинематика, динамика, контроль и управление. Серия «Библиотека инженера». – М.: СОЛОН-ПРЕСС, 2007. – 488 с.: ил.
3. Исаев А.А, Петелин В.А., Масюк В.М. Проектирование мехатронного устройства измерения положения, скорости и ускорения линейной части робота МП-9С. Региональная научно-техническая конференция "Наукоемкие технологии в приборо - и машиностроении и развитие инновационной деятельности в ВУЗе", Калуга, МГТУ им.Н.Э.Баумана, 2014.
4. Лукинов А.П. Проектирование мехатронных и робототехнических систем. [Электронный ресурс]. - Режим доступа: https://e.lanbook.com (дата обращения 17.10.2017)
5. Черных И.В. Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink. - М.: ДМК Пресс; СПб.: Питер, 2008. - 288 с.: ил.
