Статья:




О ДИФФЕРЕНЦИАЛЬНОМ МОДЕЛИРОВАНИИ ЗАКОНА ДВИЖЕНИЯ МАТЕМАТИЧЕСКОГО МАЯТНИКА
Секция: 10. Моделирование
Выходные данные
Стрижаков Р.В. О ДИФФЕРЕНЦИАЛЬНОМ МОДЕЛИРОВАНИИ ЗАКОНА ДВИЖЕНИЯ МАТЕМАТИЧЕСКОГО МАЯТНИКА // Молодежный научный форум: Технические и математические науки: электр. сб. ст. по мат. VI междунар. студ. науч.-практ. конф. № 6(6). URL: https://nauchforum.ru/archive/MNF_tech/6(6).pdf (дата обращения: 29.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 54 голоса
Мне нравится54
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

VI Студенческая международная заочная научно-практическая конференция «Молодежный научный форум: технические и математические науки»
О ДИФФЕРЕНЦИАЛЬНОМ МОДЕЛИРОВАНИИ ЗАКОНА ДВИЖЕНИЯ МАТЕМАТИЧЕСКОГО МАЯТНИКА
Стрижаков Роман Викторович
студент Колледжа электроники и бизнеса, РФ, г. Оренбург
Нурманова Сабиля Андреевна
научный руководитель, научный руководитель, преподаватель Колледжа электроники и бизнеса ОГУ, РФ, г. Оренбург
Первенствующее значение в процессе построения обыкновенных дифференциальных моделей имеет знание законов той области науки, с которой связана природа изучаемой задачи. Так, например, в механике это могут быть законы Ньютона, в теории электрических цепей — законы Кирхгофа, в теории скоростей химических реакций — закон действия масс и т. д. Конечно, на практике приходится иметь дело и с такими случаями, когда неизвестны законы, позволяющие составить дифференциальное уравнение, и поэтому необходимо прибегать к различным предположениям, касающимся протекания процесса при малых изменениях параметров — переменных. К дифференциальному уравнению тогда приводит предельный переход. В случае, если окажется, что результаты исследования полученного дифференциального уравнения как математической модели согласуются с данными, полученными опытным путем, то это и будет означать, что высказанная гипотеза правильно отражает истинное положение вещей.
Мы на примере закона движения математического маятника покажем возможность использования обыкновенных дифференциальных уравнений в процессе познания окружающей нас действительности.
Найдем закон движения и определить период Т математического маятника длины l при малых отклонениях. При условии, что t=0, S=a,  =0, где S(t) — величина дуги, на которую отклонился маятник в момент t.
=0, где S(t) — величина дуги, на которую отклонился маятник в момент t.
На маятник действует сила упругости нити F и сила тяжести Р. Когда он находиться в равновесии, то Р + F=0. Результирующая сила F1, направленная по касательной к траектории в сторону положения равновесия возникает, когда маятник отклонен.
Из рисунка 1 видно, что │ F1│= p sinα. Кроме того, по второму закону Ньютона, который гласит, что производная по времени от количества движения материальной точки равна действующей на неё силе ![]() .
.
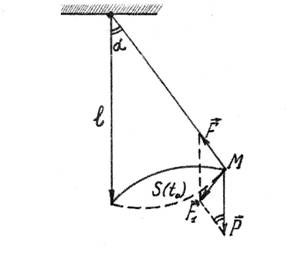
Рисунок 1. Модель математического маятника
Дифференциальное уравнение ![]() получается в проекции на горизонтальную ось. Минус в правой части получается за счет того, что частная производная второго порядка от величины дуги по времени
получается в проекции на горизонтальную ось. Минус в правой части получается за счет того, что частная производная второго порядка от величины дуги по времени ![]() отрицательна).
отрицательна).
Произведя несложные преобразования, получим
![]() ,
,
g![]() .
.
Кроме того, при малых α, sinα ≈ α ≈ S/ l.
Поэтому уравнение примет вид ![]() — линейное однородное дифференциальное уравнение с постоянными коэффициентами. Решим его. Оно имеет вид:
— линейное однородное дифференциальное уравнение с постоянными коэффициентами. Решим его. Оно имеет вид:
![]()
Составим характеристическое уравнение
λ² — k = 0 → λ = ±і![]() (k<0)
(k<0)
Фундаментальная система решений имеет вид:
Общее решение искомого дифференциального уравнения имеет вид:
у= С1sin![]() = С2 cos
= С2 cos![]() .
.
Воспользовавшись начальными условиями, t=0, S= 0,![]() , получим
, получим
S = α cos![]() .
.
Это частное решение.
Найдем период колебания маятника, используя периодичность функции косинус. Получим:

Отсюда следует, что
![]() .
.
Рассматривая вопрос о неточности маятниковых часов, мы придём к составлению дифференциальной модели. Пусть дана идеализированную модель маятниковых часов, состоящая из стержня длиной l и гири массой m на его конце (масса стержня предполагается такой, что её можно не принимать в расчет по сравнению с массой гири).
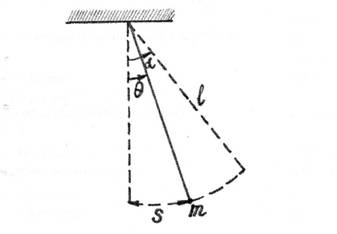
Рисунок 2. Идеализированная модель маятниковых часов
Если гирю отклонить на угол и затем отпустить, то в соответствии с законом сохранения энергии
![]() , (*)
, (*)
где: v— скорость движения гири,
g — ускорение силы тяжести.
Длина дуги, по которой гиря отклоняется от положения равновесия на угол θ, определяется равенством S= lθ, в случае если рассматривать только малые отклонения гири от положения равновесия. Тогда ![]() и соотношения (*) приводит к дифференциальному уравнению:
и соотношения (*) приводит к дифференциальному уравнению:
Полученное дифференциальное уравнение можно записать в виде:
![]() .
.
Положим, что Т — период колебания маятника, тогда
![]() .
.
Отсюда получим ![]() .
.
Последняя формула показывает зависимость периода колебания маятника от угла α. Данная зависимость и является основной причиной неточности маятниковых часов, ведь практически каждый раз гиря отклоняется в крайнее положение на угол, отличный от α.
Так как
![]()
![]()
то
 (**)
(**)
где ![]() .
.
Делая замену ![]() заметим, что когда θ возрастает от 0 до α, то φ возрастает от 0 до π/2, причем
заметим, что когда θ возрастает от 0 до α, то φ возрастает от 0 до π/2, причем
![]()
или
Если воспользоваться последним выражением, то формулу (**) можно записать в виде:

которая содержит так называемый эллиптический интеграл первого рода
Эллиптические интегралы не могут быть вычислены в элементарных функциях. Дифференцируя уравнение ![]() по переменной t, получим:
по переменной t, получим:
![]() .
.
Таким образом, в исследуемом вопросе о законе движения математического маятника пришли к дифференциальной модели реального процесса. Это обстоятельство дает нам возможность рассмотрения дифференциального моделирования и в других областях знаний, а также его практическое применение.
Список литературы:
1. Амелькин В.В. Дифференциальные уравнения в приложениях. / В.В. Амелькин. — М.: Наука, 1987.—160 с.
2. Виленкин Н.Я. и др. Дифференциальные уравнения. Учеб. Пособие для студентов-заочников в IV курса физ-мат, фак. / Н.Я. Виденкин, М.А. Доброхотова, А.Н. Сафонов. — М.: Просвещение, 1984. — 176 с.
3. Демидович Б.П., Моденов В.П. Дифференциальные уравнения: Учебное пособие. / Б.П. Демидович, В.П. Моденов. — СПб.: Издательство «Лань», 2008. — 288 с.
4. Матвеев Н.М. Дифференциальные уравнения: Учеб. пособие для студентов пед. ин-тов по физ.-мат. спец. / Н.М. Матвеев М.: Просвещение, 1988. — 256 с.
5. Тихонов А.Н., Васильева А.Б., Свешников А.Г. Дифференциальные уравнения: Учеб.: Для вызов. — 4-е изд. — М.: ФИЗМФТЛИТ, 2005. — 256 с.
6. Шипачев В.С. Высшая математика : Учебник для вузов / В.С. Шипачев. — 6-е изд., стер. — М. : Высшая школа, 2003. — 479 с.
