Статья:




ОЦЕНКА ОТКЛОНЕНИЯ МОБИЛЬНЫХ УЗЛОВ БЕСПРОВОДНОЙ СЕТИ ПРИ РАЗЛИЧНЫХ СТРАТЕГИЯХ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ
Секция: 15. Телекоммуникации
Выходные данные
Крупский А.С. ОЦЕНКА ОТКЛОНЕНИЯ МОБИЛЬНЫХ УЗЛОВ БЕСПРОВОДНОЙ СЕТИ ПРИ РАЗЛИЧНЫХ СТРАТЕГИЯХ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ // Молодежный научный форум: Технические и математические науки: электр. сб. ст. по мат. X междунар. студ. науч.-практ. конф. № 3(10). URL: https://nauchforum.ru/archive/MNF_social/3(10).pdf (дата обращения: 26.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

X Студенческая международная заочная научно-практическая конференция «Молодежный научный форум: технические и математические науки»
ОЦЕНКА ОТКЛОНЕНИЯ МОБИЛЬНЫХ УЗЛОВ БЕСПРОВОДНОЙ СЕТИ ПРИ РАЗЛИЧНЫХ СТРАТЕГИЯХ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ
Крупский Александр Сергеевич
аспирант Томского Университета Систем Управления и Радиоэлектроники, РФ, г. Томск
Катаев Михаил Юрьевич
научный руководитель, д-р техн. наук, проф. Томского Университета Систем Управления и Радиоэлектроники, РФ, г. Томск
Протоколы маршрутизации обеспечивают поиск и поддержание маршрута в сети. В большинстве случаев маршрутизация в мобильных сетях строится на основе моделей движения узлов и их групп, при этом все мобильные узлы считаются равноправными. Это оправдано в том случае, если задача, для которой необходима передача данных, совместно выполняется однотипными узлами. В реальных же условиях узлы могут менять свои роли. Среди них можно различить генераторы трафика, потребители и промежуточные узлы. Для обеспечения качества обслуживания (QoS) между генератором и приёмником (клиентом и сервером) необходимо, чтобы существовал маршрут, обладающий для этого достаточными свободными ресурсами. При этом, в зависимости от решаемой задачи, клиент и сервер могут либо двигаться по траектории, либо не иметь такой необходимости. Во втором случае их перемещением можно управлять.
Для обеспечения QoS канала передачи необходимо гарантировать постоянство предоставляемых им ресурсов. При применении идеологии интегрированного сервиса, возможно возложить контроль над качеством на каждый узел, расположенный вдоль зарезервированного маршрута с тем, чтобы обеспечить оперативный контроль над изменением состояния связей в окрестностях каждого из узлов. Время жизни и стабильность характеристик каждого из таких маршрутов передачи целесообразно увеличить при помощи контроля над положением узлов на этом маршруте.
Поддержание целостности единичного маршрута (не пересекающегося с другими маршрутами) основывается на контроле над состоянием связей и их поддержании между мобильными узлами. Среди всех связей выделяются критичные — те, которые в данный момент задействованы в зарезервированном маршруте. Их разрыв или деградация крайне нежелательны. Кроме того, при рассмотрении отдельного маршрута, его пропускная способность определяется узким местом — связью с наименьшей пропускной способностью. То есть возникает задача обеспечения равномерных ресурсов для всех связей.
Таблица 1.
Функция скорости передачи данных для беспроводной сети WiMax
D, км |
[0;0,25) |
[0,25;0,5) |
[0,5;0,75) |
[0,75;1) |
[1;1,25) |
[1,25;1,5) |
>1,5 |
S, Мб/с |
65,9 |
60 |
45 |
30 |
15 |
10 |
0 |
В случае стационарной среды (качество связи между двумя станциями зависит от расстояния, но не от их конкретного местоположения) и простой функции скорости передачи (Табл. 1) при фиксированном количестве узлов в маршруте условие равенства качества связи между узлами можно сформулировать для WiMax [1] следующим образом. Пусть ![]() — зарезервированный маршрут, состоящий из узла источника, узла приёмника и промежуточных узлов. Равенство качества связей обеспечивается при выполнении для всего маршрута B условия 1:
— зарезервированный маршрут, состоящий из узла источника, узла приёмника и промежуточных узлов. Равенство качества связей обеспечивается при выполнении для всего маршрута B условия 1:
|
|
(1) |
где: ![]() — расстояние между узлами
— расстояние между узлами ![]() и
и ![]() ;
;
i — индекс узла, предшествующего узлу j в маршруте B;
j — индекс узла, предшествующего узлу k в маршруте B;
k — индекс узла следующего за узлом с индексом j в маршруте B.
В соответствии с функцией качества S, условия передачи тем лучше, чем ближе узлы находятся друг к другу, однако, при уменьшении интервала возникает ситуация перекрытия (Рис. 1).

Рисунок 1. Перекрытие областей передачи
Радиус области действия назовём предельным максимальным интервалом.
В простейшем случае можно считать, что перекрытие происходит при попадании узла i в область действия узла k. То есть при интервале меньшем, чем расстояние действия узла делённое пополам. В соответствии с таблицей 1 оно составляет семьсот пятьдесят метров. Данное расстояние будем называть минимальным интервалом ![]() .
.
Скорость передачи будет увеличиваться при уменьшении интервала от максимального предельного до минимального. Для увеличения скорости необходимо минимизировать все интервалы между узлами на маршруте до тех пор, пока они больше минимального интервала. Пусть количество узлов в маршруте равно ![]() , тогда оптимальным положением узлов будет прямая, в случае, если выполняется условие (2).
, тогда оптимальным положением узлов будет прямая, в случае, если выполняется условие (2).
|
|
|
(2) |
где: ![]() — узел-источник;
— узел-источник;
![]() — узел-приёмник.
— узел-приёмник.
Это легко доказать, учитывая то, что отрезок для заданной проекции на прямую, соединяющую![]() и
и ![]() , минимален, если он параллелен этой прямой.
, минимален, если он параллелен этой прямой.
Если условие 2 не выполняется, то узлы находятся друг к другу ближе, чем минимальный интервал. Если они будут располагаться на прямой, то произойдёт перекрытие. В этом случае будем говорить, что маршрут насыщен.
Возможна обратная ситуация. Разрыв маршрута происходит в случае, если выполняется условие (3).
|
|
|
(3) |
Если для 3 выполняется равенство — то система находится на границе разрыва. Так как в данном случае небольшое изменение положения узла может привести к отказу системы, то, для повышения её устойчивости, целесообразно смягчить требование, введя полосу расстояния dgap, нахождение узла в которой будет свидетельствовать о приближении к границе разрыва (4). Такой маршрут будем называть разряженным.
|
|
|
(4) |
По аналогии с этим можно ввести условие для предупреждения насыщенности маршрута (5).
|
|
|
(5) |
Необходимыми условиями поддержания целостности отдельного маршрута являются 2 и 3. Чтобы сделать их достаточными для отдельного маршрута, необходимо добавить стратегию управления узлами, при котором одно целостное (без разрывов) состояние маршрута переходит в другое целостное при произвольных воздействиях p на узел-приёмник и узел-передатчик, что будет рассмотрено ниже.
Рассмотрим случай, когда система находится изначально в стабильном состоянии (Рис. 2). Все узлы маршрута расположены вдоль одной прямой.
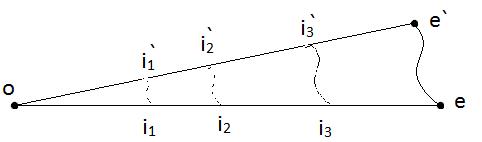
Рисунок 2. Движение узлов относительно центра
При фиксированном узле-отправителе O и движущемся по траектории узле e все промежуточные узлы i будут проходить по траекториям подобным ee` относительно центра преобразования подобия O. Причём, длина любой траекторий ii` меньше, чем траектории ee`, так как они расположены ближе к O. Следовательно, для всех узлов i достаточно обладать возможностью передвигаться со скоростью не меньшей, чем скорость узла e.
Рассмотрим случай, когда передающий узел так же подвижен (Рис. 3).
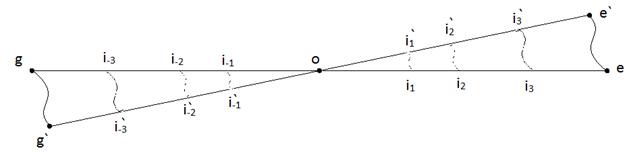
Рисунок 3. Движение узла-приёмника и узла-передатчика
В этом случае в каждый момент времени центр подобия O может менять своё местоположение на исходной прямой расположения узлов, но, тем не менее, каждый бесконечно малый элемент траектории является следствием преобразования подобия относительно этой точки. На рисунке показан случай, когда скалярное произведение скоростей узлов меньше нуля. Если взять случай, когда оно больше нуля, но не равно единице, то центр преобразования O будет находиться не между g` и e`, а левее или правее их, что сводит данный случай к предыдущему. В случае если скалярное произведение между скоростями равно единице, то имеет место параллельный перенос отрезка ge в пространстве в отрезок g`e`. При этом скорости всех узлов i совпадают со скоростями g и e в каждый момент времени.
При данном подходе необходимо определить положение узла на прямой, соединяющей узел-приёмник и узел-передатчик. Предполагалось, что все узлы i получают информацию о перемещении g и e мгновенно. На практике, передача этих данных от обоих узлов, требует временных затрат. Минимальной задержкой является задержка равная времени передачи через половину маршрута. Максимальной — длина маршрута минус единица.
Возможно получить оценку влияния задержки на передвижение узлов. В случае если в качестве беспилотной платформы для промежуточных узлов использовать БЛА ZALA 421-06 [2] или другие платформы вертолётного типа, то их максимальная скорость составляет порядка семидесяти километров в час. Для различных начальных состояний (различные интервалы между узлами, расположенными на одной линии) максимальное отклонение будет наблюдаться, когда вектора скорости узла-источника и узла-приёмника будут совпадать. При этом, среди всех i промежуточных узлов задержка будет максимальной для узлов непосредственно примыкающих к приёмнику и передатчику, т. к. информации об изменении положения требуется пройти весь маршрут без одного узла. На рисунке 4 показано изменение расстояния между узлом-приёмником (передатчиком) и примыкающим к нему узлом при различных начальных интервалах и различной длине маршрута.
Рисунок 4. Влияние задержки сети на отклонение узла от положения на прямой
Как видно из рисунка, изменение расстояния в сто метров в самом худшем наблюдается при длине маршрута порядка двухсот узлов. При мгновенном распространении информации такого изменения не наблюдалось бы. На основе этих данных возможно выбрать dgapd и dgapf для необходимой максимальной длины маршрута, чтобы предотвращать перекрытие и разрыв. В данном эксперименте использовалось предположение, что узел мгновенно приобретает максимальную скорость. Такое допущение оказывает тем большее влияние, чем меньше ускорение мобильной платформы. При необходимости учёта этого факта требуется задать более сложную модель ускорения и проводить эксперимент до выхода узла на полную скорость.
Однако, хоть данная стратегия и применима для поддержания маршрута, но она обладает существенными недостатками:
· Отклонение зависит от размера сети;
· Требуется передача информации о положении узлов на протяжении всего маршрута, что при потере связи приведёт к остановке узлов;
· Узлы в середине маршрута будут реагировать раньше, чем в его начале и конце, что ограничивает максимальную длину маршрута.
Выходом из сложившейся ситуации является разнесение функций контроля над перемещением на каждый отдельный узел. Таким образом, задержка между событием и реакцией сократится до времени одной передачи между узлами.
Для сравнения с привёдённой выше стратегией, проводится эксперимент в аналогичных условиях, когда узел приёмник и узел получатель движутся сонаправлено. Один из моментов процесса моделирования показан на рисунке 5. Здесь приёмником и передатчиком выступают крайний левый и крайний правый узлы. Они движутся со скоростью семьдесят километров в час вдоль оси y. Промежуточные узлы изменяют своё положение с тем, чтобы обеспечить поддержание маршрута.

Рисунок 5. Визуализация передвижения узлов при поддержании маршрута
Информация о местоположении передаётся с частотой передачи кадра и распространяется каждым узлом до своих соседей. Таким образом, информация о местоположении узла-приёмника и узла-получателя косвенным образом передаётся за счёт изменения положения в пространстве смежных с ними узлов. Узел, входящий в состав маршрута определяет своё местоположение как точку равноудалённую от предшествующего и последующего узла в маршруте (Рис 6).
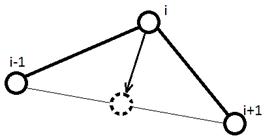
Рисунок 6. Стратегия перемещения мобильного узла на основе данных о соседях
Данная позиция узла обеспечивает одинаковое расстояние между узлом i-1 и узлом i+1, что при однородной среде передачи обеспечивает одинаковое QoS для каждой из связей, устраняя тем самым узкие места в маршруте. Таким образом, обеспечивается наиболее полное использование ресурсов передающих узлов.
Однако данная стратегия приводит к тому, что цепь промежуточных узлов образует дугу за счёт возрастания задержки распространения информации до узлов в середине маршрута. Важно оценить устойчивость данной системы в данных условиях. Для этого на программном стенде были проведены симуляции для ста (Рис. 7) и двухсот пятидесяти (Рис. 8) узлов соответственно. Так как движение происходило вдоль оси y, то оценивались:
· минимальная координата по y(координата наиболее «отстающего» узла, обычно расположенного в центре маршрута);
· максимальная координата (фактически координаты по y узла-приёмника и узла-передатчика т. к. они совпадают),
· смещение — разность между максимальной и минимальной координатой. Так же характеризует максимальное отклонение среди узлов от оптимального положения на линии соединяющей узел-приёмник и узел-передатчик.
· Максимальный интервал между узлами — максимальное фактическое расстояние между узлами, которое не должно превышать максимального допустимого интервала Imax.
В ходе проведения моделирования по поддержанию целостности маршрута из ста узлов (7). Переходной процесс при запуске системы завершается около пятисотой секунды. Скорость наиболее отстающего узла приближается к скорости ведущих узлов. В момент переходной процесс при завершении движения ведущих узлов начинается с шестисотой секунды. О завершении переходных процессов будет свидетельствовать тот участок графика смещения, который можно будет аппроксимировать прямой с необходимой точностью. То есть можно считать, что переходной процесс на этом участке завершён с некоторой долей погрешности.
Рисунок 7. Пространственные характеристики при моделировании маршрута из ста узлов
Тем не менее, отсутствие параллельности между прямой, отображающей максимальные и прямыми, отображающими минимальные значения y свидетельствует о том, что смещение узлов увеличивается. Однако скорость увеличения смещения в общем случае не критична, так как при данном увеличении максимальный интервал между узлами не превысил 1411,50 метра, тогда как предельный максимальный интервал составляет 1500 метров, а начальный составлял 1400. Величина времени моделирования сопоставима в первом случае (рис. 7) и перекрывает во втором (рис. 8) время работы мобильных платформ от батареи. При необходимости, однако же, возможно провести данные эксперименты на временном отрезке большей длинны. При моделировании перемещения двухсот пятидесяти узлов отсутствие переходных процессов наблюдается в промежутке от двух тысяч до пяти тысяч секунд. Ситуация аналогична описанной выше с той разницей, что максимальный интервал между узлами не превышал значения в 1474,38 метра, что меньше предельного максимального.
Рисунок 8. Пространственные характеристики при моделировании маршрута из двухсот пятидесяти узлов
Список литературы:
1. «IEEE Standard for Local and metropolitan area networks Part 16: Air Interface for Broadband Wireless Access Systems» — [Электронный документ]. — Режим доступа: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=5062485&isnumber=5062484, для зарегистрированных пользователей.
2. «Беспилотный вертолет ZALA 421-06» // Беспилотные летательное аппараты — [Электронный ресурс]. — Режим доступа: http://bp-la.ru/bespilotnyj-vertolet-zala-421-06, свободный.
