Статья:




РАЗРАБОТКА ПРОГРАММНО-АЛГОРИТМИЧЕСКОГО ОБЕСПЕЧЕНИЯ ДЛЯ РЕШЕНИЯ ЗАДАЧ ФОРМИРОВАНИЯ КОМАНДНО-ПРОГРАММНОЙ ИНФОРМАЦИИ И ПЛАНИРОВАНИЯ РАБОТ С МАЛОРАЗМЕРНЫМИ КОСМИЧЕСКИМИ АППАРАТАМИ
Секция: 3. Информационные технологии
Выходные данные
Овчинников Е.Г. РАЗРАБОТКА ПРОГРАММНО-АЛГОРИТМИЧЕСКОГО ОБЕСПЕЧЕНИЯ ДЛЯ РЕШЕНИЯ ЗАДАЧ ФОРМИРОВАНИЯ КОМАНДНО-ПРОГРАММНОЙ ИНФОРМАЦИИ И ПЛАНИРОВАНИЯ РАБОТ С МАЛОРАЗМЕРНЫМИ КОСМИЧЕСКИМИ АППАРАТАМИ // Молодежный научный форум: Технические и математические науки: электр. сб. ст. по мат. XXIII междунар. студ. науч.-практ. конф. № 4(23). URL: https://nauchforum.ru/archive/MNF_tech/4(23).pdf (дата обращения: 27.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 3 голоса
Мне нравится3
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

XXIII Студенческая международная заочная научно-практическая конференция «Молодежный научный форум: технические и математические науки»
РАЗРАБОТКА ПРОГРАММНО-АЛГОРИТМИЧЕСКОГО ОБЕСПЕЧЕНИЯ ДЛЯ РЕШЕНИЯ ЗАДАЧ ФОРМИРОВАНИЯ КОМАНДНО-ПРОГРАММНОЙ ИНФОРМАЦИИ И ПЛАНИРОВАНИЯ РАБОТ С МАЛОРАЗМЕРНЫМИ КОСМИЧЕСКИМИ АППАРАТАМИ
Овчинников Евгений Геннадьевич
студент Московского авиационного института, РФ, г. Москва
Щукина Юлия Александровна
научный руководитель, ведущий инженер ФГУП «НПО им. С.А. Лавочкина», РФ, г. Химки
На рубеже 2000-х годов XX века существенно изменились приоритеты в разработке космических аппаратов (КА). Видимое преимущество по ряду направлений космической деятельности получило создание малых космических аппаратов (МКА) по сравнению с крупногабаритными и тяжелыми КА. В результате начавшегося процесса миниатюризации КА удалось снизить массы некоторых больших и тяжелых КА и создать новые аппараты аналогичного назначения с массой в несколько сотен килограмм [2, с. 1]. Такие аппараты отличаются увеличенной долей электроники и вычислительной техники — на одном КА может быть установлено до десяти комплексов различной научной аппаратуры.
Для достижения высокой аппаратной надежности и обеспечения непрерывной сеансной работы необходимы новые подходы к организации архитектуры МКА, а также к организации системы управления и контроля.
Основными элементами системы управления и контроля являются:
1. наземный комплекс управления;
2. бортовой комплекс управления МКА;
3. системы связи и передачи данных.
На рис. 1 представлена общая схема организации проведения работ с КА.
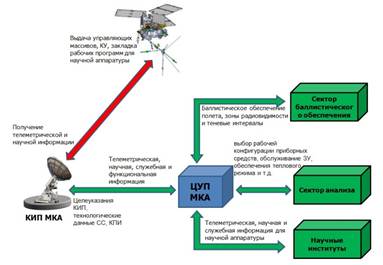
Рисунок 1. Общая схема организации проведения работ с КА
При этом роль НКУ сводится к следующему:
1. контроль параметров НОРМА (обобщенный параметр, характеризующий работоспособность МКА), поступающих по связному каналу в центр управления полетом (ЦУП);
2. периодическое прогнозирование движения МКА;
3. периодическое проведение сверки и коррекции бортовых шкал времени;
4. периодическое проведение регламентных проверок работоспособности систем МКА;
5. учет отказов аппаратуры КА и прогнозирование его работы.
Одними из обязательных условий надежного выполнения задач МКА и его систем является проведение своевременного планирования работ и формирование командно-программной информации (КПИ) для сеансов связи. На всех этапах полета персоналом сектора управления и оперативного контроля в течение определенного срока до выхода на связь с МКА осуществляется планирование работы космического аппарата и средств наземного комплекса управления. На основании заявок, поступивших от специалистов подразделений предприятия и внешних организаций, а также зон радиовидимости и теневых интервалов, задаваемых сотрудниками сектора баллистического обеспечения, необходимо сформировать план на определенный период времени.
В связи с этим актуально создание программно-алгоритмического обеспечения (ПАО), автоматизирующего ввод заявок, а также позволяющего формировать КПИ по полученным данным. В результате, разработанное ПАО позволит значительно упростить процесс создания сеанса связи и итогового плана работ, который будет выводиться в текстовый документ автоматически по команде оператора. На рисунке 2 представлена общая функциональная схема разрабатываемого ПАО.
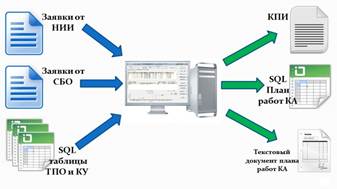
Рисунок 2. Общая функциональная схема ПАО
К исходным данным на разработку ПАО относятся:
1. Заявки на работу с МКА от сектора баллистического обеспечения;
2. Заявки на работу с МКА от Научно-исследовательских институтов (НИИ);
3. Заявки на работу с МКА от сектора анализа КА;
4. Таблицы типовых полетных операций (ТПО) и команд управления (КУ);
5. Аппаратные и программные средства (ПЭВМ с установленной OS windows 7 и тактовой частотой процессора не менее 1 ГГц, система управления базами данных MySQL, язык программирования С++, среда разработки RADStudio).
Заявка — это оповещение начальника сектора управления о планируемом проведении работы с КА, привязанное к определенному временному интервалу и поступающее в общую базу данных работ от конкретного подразделения предприятия или НИИ. На рисунке 3 представлен пример заявки от сектора баллистического обеспечения с указанием зон радиовидимости МКА.

Рисунок 3. Пример заявки от сектора баллистического обеспечения
Для ЦУПа и контрольно-проверочной аппаратуры космического аппарата используется единая структура баз данных (БД), реализованная средствами СУБД MySQL версии 5.1. БД ЦУП обеспечивает:
1. Информационное обеспечение отработки и штатной эксплуатации КА как на этапе наземной отработки, так и при управлении космическим полетом;
2. Параллельную экспериментальную отработку и штатную эксплуатацию нескольких КА, образующих орбитальную группировку;
3. Использование единого программного обеспечения, а также его унификацию для различных КА с минимальными доработками.
Для доступа к СУБД программы специального программного обеспечения (СПО) должны использовать язык запросов SQL версии MySQL 5.1 и интерфейс ODBC версии 3.51. Доступ к БД организуется через систему виртуальных серверов, которые физически могут размещаться как на одном, так и на разных ЭВМ. В состав БД планирования и управления КА входят около тридцати таблиц с различными данными, необходимыми для создания КПИ на сеанс связи. Перечислим некоторые из них:
1. Таблица векторов состояния;
2. Таблица элементов орбиты;
3. Таблица ТПО и КУ;
4. Таблица исходных данных для формирования массивов программной ориентации (МПО) и т. д.
В качестве примера на рисунке 4 представлена структура таблицы элементов орбиты КА.
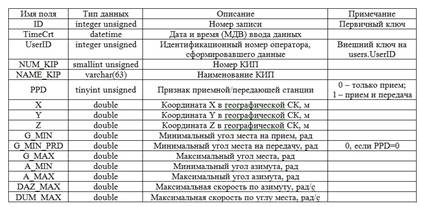
Рисунок 4. Структура таблицы элементов орбиты МКА
Программа должна быть реализована на языке программирования С++. Данный язык позволяет быстро и качественно создавать полноценные оконные приложения, предоставляет средства для проектирования, редактора, отладчика и подключения приложения к БД.
Выходными данными разработанного ПАО являются:
1. Сформированные пакеты КПИ (представленные в двоичном виде команды и массивы для передачи информации на КА);
2. План работ на выбранный период времени, записанный в таблицу БД;
3. Текстовый документ плана работ формата MS Exel для отслеживания работ операторами сектора управления.
На рисунке 4 представлена общая блок-схема разрабатываемого ПАО.
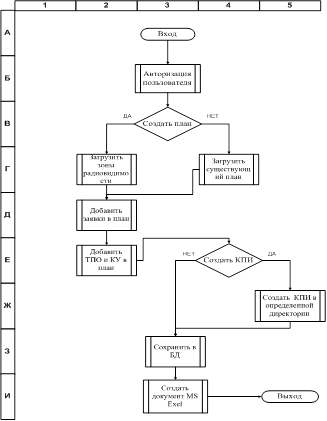
Рисунок 4. Общая блок-схема ПАО
По данной блок-схеме и на основании входного потока информации была реализована программа для планирования работ с КА. Программа представляет собой экранное приложение, состоящие из главной формы и четырех дополнительных окон, для добавления различных операций в план. Рассмотрим главное окно программы, представленное на рисунке 5.
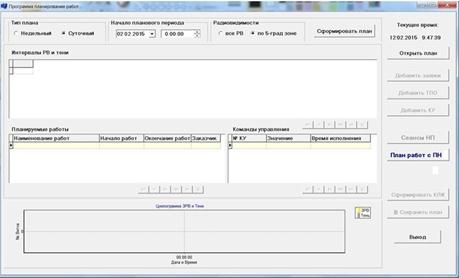
Рисунок 5. Главное окно программы
В заголовке окна есть возможность выбора типа плана (суточный или недельный). При нажатии на кнопку сформировать план или при открытии уже существующего плана, в окне «Интервалы и тени» отобразятся все зоны радиовидимости на выбранный период, это также будет видно на временной циклограмме, расположенной ниже (рисунок 6).
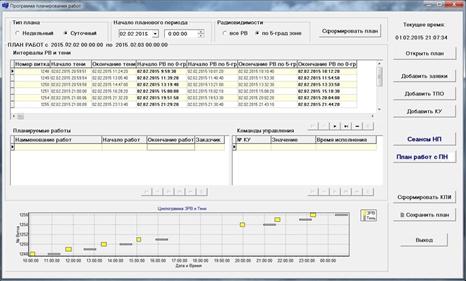
Рисунок 6. Загрузка зон радиовидимости и теневых интервалов
После этого станут доступными кнопки «Добавить заявки», «Добавить ТПО», «Добавить КУ», а также «План работ с ПН» (обозначает работу с научной аппаратурой). Для примера добавим в план несколько типовых полетных операций, для этого откроем окно «Сформировать ТПО» нажатием на кнопку «Добавить ТПО» (рисунок 7).
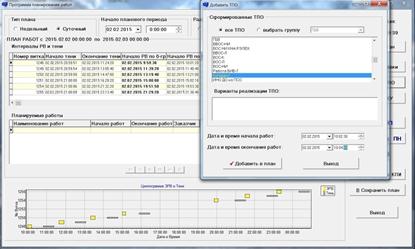
Рисунок 7. Добавление ТПО в план работ с КА
После того, как оператор выполнил все необходимые операции по формированию плана, нажатием кнопки «Сформировать КПИ» все введенные данные будут сохранены в БД и автоматически будет создан документ MS Excel c упорядоченным видом сформированного плана работ (рисунок 8).
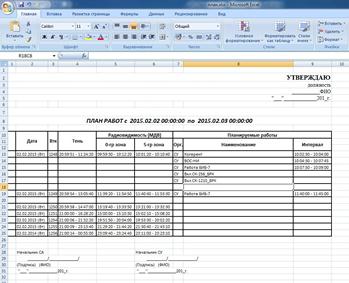
Рисунок 8. Сформированный MS Excel документ для оператора сектора управления
На этапе написания статьи программа уже прошла этап тестирования и апробации при работе с МКА. Опытным путем было доказано, что при планировании работ не возникает коллизий, и КПИ формируются в соответствии с техническими требованиями. По результатам тестирования и доработки ПАО были сделаны выводы о том, что разработанное ПАО удовлетворяет поставленным задачам и, с учетом проведения инструктажа с персоналом, может быть внедрено на предприятии. Программа позволит проводить недельное и суточное планирование, в короткие сроки изменять структуру заготовленного плана и оперативно формировать КПИ для сеансов связи. Важно отметить возможность применения данного ПАО при планировании работ с другими КА.
Список литературы:
1. Архангельский А.Я., «Программирование в С++», 7-ое издание, изд. «Бином», 2010 — 1304 с.
2. История создания МКА «Канопус-Б» — [Электронный ресурс] — Режим доступа. — URL: http://www.federalspace.ru/media/files/docs/3/kanopus.pdf (дата обращения 15.04.2015).
3. Киселев А.И., Медведев А.Н., «Космонавтика на рубеже тысячелетий. Итоги и перспективы», 2001 — 672 с.
4. Куландин А.А., Тимашов С.В., Иванов В.П., «Энергетические системы космических аппаратов», 1979 — 482 с.
5. Уроки по программированию — [Электронный ресурс] — Режим доступа. — URL: http://www.Cpp-manual.ru (Дата обращения 01.09.2014).
6. Хомоненко А.Д., Ададуров С.Е., «Работа с базами данных в С++ Builder», изд. «БХВ-Петербург», 2006 — 496 с.
