Статья:




СИСТЕМА АВТОМАТИЧЕСКОЙ КОРРЕКЦИИ ПОЛОЖЕНИЯ ЛАЗЕРНОЙ ОСИ
Секция: 19. Энергетика
Выходные данные
Борбенчук А.С., Айдарханов Н. СИСТЕМА АВТОМАТИЧЕСКОЙ КОРРЕКЦИИ ПОЛОЖЕНИЯ ЛАЗЕРНОЙ ОСИ // Молодежный научный форум: Технические и математические науки: электр. сб. ст. по мат. XXIII междунар. студ. науч.-практ. конф. № 4(23). URL: https://nauchforum.ru/archive/MNF_tech/4(23).pdf (дата обращения: 22.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 1 голос
Мне нравится1
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

XXIII Студенческая международная заочная научно-практическая конференция «Молодежный научный форум: технические и математические науки»
СИСТЕМА АВТОМАТИЧЕСКОЙ КОРРЕКЦИИ ПОЛОЖЕНИЯ ЛАЗЕРНОЙ ОСИ
Борбенчук Алексей Сергеевич
студент Университета ИТМО, РФ, г. Санкт-Петербург
Айдарханов Насипберли
студент Университета ИТМО, РФ, г. Санкт-Петербург
Петров Сергей Алексеевич
научный руководитель, доц. Волгоградского государственного технического университета, РФ, г. Волгоград
Для развития современного машиностроения важно повышение качества выпускаемой продукции и снижение ее себестоимости. Наибольшее влияние на качество оказывает точность изготовления деталей и их сборки. В настоящее время при изготовлении и сборке используются бесконтактные лазерные системы, позволяющие с достаточно высокой точностью осуществлять контроль сборочных операций, производить разметку и т. д.
В лазерных системах одним из основных параметров, влияющих на точность, является величина отклонения лазерного луча от заданного положения. Поэтому с целью увеличения точности всей системы необходимо использовать систему автоматической коррекции положения лазерной оси.
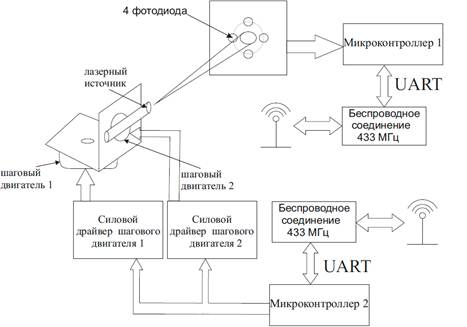
Рисунок 1. Структура системы
Структура предлагаемой системы расположена на рис. 1. Блок мишени состоит и четырех фотодиодов и оптико-электронного датчика определения энергетического центра лазерного пучка, фотодиоды под воздействием лазерного излучения вырабатывают сигнал, оптико-электронный датчик обрабатывает сигнал и передает его на вход микропроцессорного устройства управления, представленного микроконтроллером 1.
Микроконтроллер 1 согласно принятому сигналу вырабатывает слово коррекции и посредством беспроводной передачи данных посылает это слово на микроконтроллер 2.
Микроконтроллер 2 управляет электроприводами согласно принятому слову коррекции. Электроприводы служат для позиционирования лазерного источника. Каждый электропривод состоит из шагового двигателя и силового драйвера шагового двигателя.
В состав системы входят модули беспроводной передачи данных на частоте 433 МГц (рис. 2а), шаговые приводы лазерного излучателя (рис. 2б) и оптико-электронный датчик определения энергетического центра лазерного пучка (рис. 3а), реализующий дифференциальный (нулевой) метод измерения.
Координация устройств системы осуществляется микроконтроллерами (МК) MSP430G2ххх (рис. 3в).
Управление шаговыми двигателями осуществляется при помощи мостовых драйверов на основе микросхемы L298n. Драйвер на основе микросхемы L298n изображена на рисунке 3б.
L298n — монолитная интегральная схема. Это высоковольтный сильноточный двухполупериодный мостовой драйвер, предназначенный для принятия стандартной транзисторно-транзисторной логики и управления электродвигателями постоянного тока и шаговыми электродвигателями.
Для коррекции положения лазерного источника были выбраны униполярные шаговые двигатели с полушаговым режимом (рис. 4).


а) б)
Рисунок 2. Модуль беспроводной передачи данных (а) и шаговый привод лазерного излучателя (б)
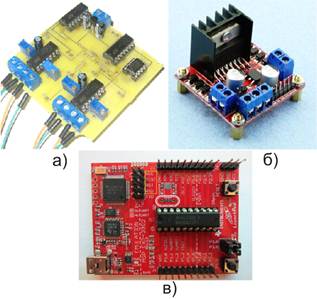
Рисунок 3. Оптико-электронный датчик определения энергетического центра лазерного пучка (а), драйвер на микросхеме L298n (б), микроконтроллер MSp430G2553 (в)
Рисунок 4. Последовательность включения фаз в шаговом двигателе для реализации полушагового режима
Взаимосвязь между микроконтроллерами осуществляется посредством интерфейса UART.
Часть схемы автоматической коррекции положения лазерной оси была промоделирована в программном пакете Proteus 7.10. Собранная схема изображена на рисунке 5.
В схеме были реализованы: часть схемы оптико-электронного датчика определения энергетического центра лазерного пучка, 2 микроконтроллера MSP430 и шаговые приводы, состоящие из микросхемы L298n и шагового двигателя. После замыкания ключа питание подается на оптрон, эмиттер которого соединен с резистором. Напряжение с резистора подается на ножку первого микроконтроллера (MSP430G2553), отвечающего за прием сигнала с мишени.
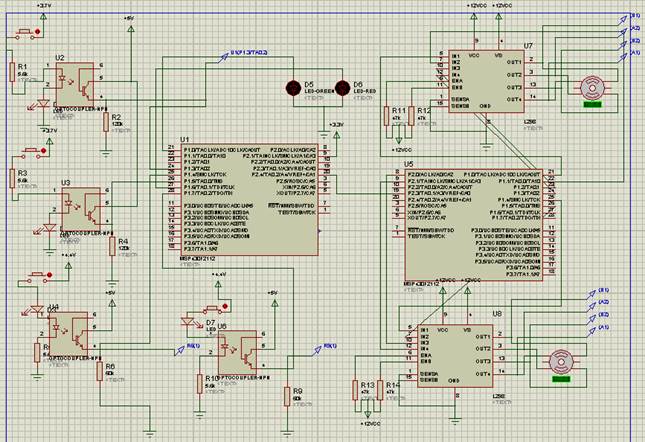
Рисунок 5. Схема в программном пакете Proteus 7.10
На микроконтроллере реализуется программа, алгоритм работы которой представлен на рис. 6.
Первоначально осуществляется настройка программы, которая включает в себя следующие шаги:
1) Макроподстановки.
2) Задание начальных значений переменных.
3) Настройка регистров специальных функций.
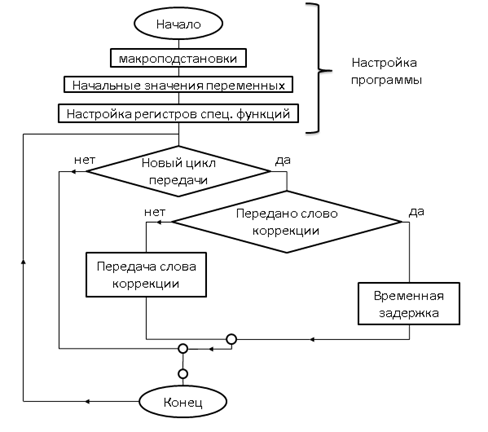
Рисунок 6. Алгоритм программы на первом микроконтроллере
Затем выясняется, нужен ли нам новый цикл передачи слова коррекции, при отрицательном ответе программа переходит снова к этому вопросу, пока не получит утвердительный ответ, при утвердительном ответе проверяется передано ли слово коррекции, если оно передано, то происходит временная задержка и возврат к вопросу о цикле передачи, если слово коррекции не передано, то происходит его передача.
Прием слова коррекции осуществляется вторым микроконтроллером (MSP430G2452), на котором реализована программа, алгоритм которой представлен на рис. 7.
Здесь также происходит настройка программы, состоящая из тех же пунктов, что и в предыдущей программе. Происходит прием слова коррекции, соответствующий одному из состояний (требуется перемещение в одну из четырех сторон или не требуется).
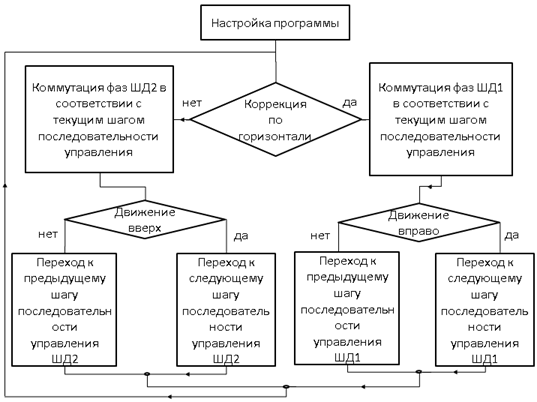
Рисунок 7. Алгоритм программы на втором микроконтроллере
Затем проверяется, требуется ли нам коррекция по горизонтали, если требуется, то происходит коммутация фаз первого шагового двигателя, отвечающего за перемещение по горизонтали, и выясняется в какую сторону необходимо движение. Если это движение вправо, то происходит переход к следующему шагу последовательности управления первого шагового двигателя, если влево — то к предыдущему.
Затем программа возвращается к выяснению, по какой из осей необходима коррекция.
Для коррекции по вертикали необходимо отказаться от коррекции по горизонтали и проделать аналогичные шаги, что в и коррекции по горизонтали.
Таким образом, была разработана система автоматической коррекции положения лазерной оси, позволяющая задавать лазерную ось с точностью позиционирования 0,4 мм.
Список литературы:
1. Аксененко М.Д. Микроэлектронные фотоприемные устройства / Аксененко М.Д., Бараночников М.Л., Смолин О.В. — Москва: Энергоатомиздат, 1984. — 208 с.
2. Ишанин Г.Г. Источники и приемники излучения / Г.Г. Ишанин [и др.]. — Санкт-Петербург: Политехника, 1991. — 240 с.
3. Обзор микроконтроллеров — [Электронный ресурс] / Radio-New.Ru. — 2009. — Режим доступа: http://radio-new.ru/article/2.html (Дата обращения: 12.02.2014).
4. Основные принципы работы современных шаговых двигателей — [Электронный ресурс] / Stepmotors.ru — 2010. — Режим доступа:http://stepmotors.ru/theory/01/2.htm (дата обращения: 15.02.2014).
