Статья:




ТРАЕКТОРИИ ОБУЧЕНИЯ ПРОСТЕЙШЕГО ЛИНЕЙНОГО ПЕРСЕПТРОНА
Секция: 6. Математические науки
Выходные данные
Босикова А.С. ТРАЕКТОРИИ ОБУЧЕНИЯ ПРОСТЕЙШЕГО ЛИНЕЙНОГО ПЕРСЕПТРОНА // Молодежный научный форум: Технические и математические науки: электр. сб. ст. по мат. XXXII междунар. студ. науч.-практ. конф. № 3(32). URL: https://nauchforum.ru/archive/MNF_tech/3(32).pdf (дата обращения: 26.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 44 голоса
Мне нравится44
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

XXXII Студенческая международная заочная научно-практическая конференция «Молодежный научный форум: технические и математические науки»
ТРАЕКТОРИИ ОБУЧЕНИЯ ПРОСТЕЙШЕГО ЛИНЕЙНОГО ПЕРСЕПТРОНА
Босикова Александра Сергеевна
студент института математики и информатики Северо-Восточного федерального университета им. М.К. Аммосова, РФ, Республика Саха (Якутия), г.Якутск
Шамаев Эллэй Иванович
научный руководитель, канд. физ.-мат. наук, кафедра алгебры и геометрии,
Северо-Восточного федерального университета им. М.К. Аммосова,
РФ, Республика Саха (Якутия), г.Якутск
В данной работе численными методами исследованы траектории обучения простейшего двуслойного линейного персептрона ![]() , где
, где![]() – входной вектор,
– входной вектор, ![]() ,
, ![]() – линейные операторы. Обучением на заданных входных векторах
– линейные операторы. Обучением на заданных входных векторах ![]() и соответствующих выходных векторах
и соответствующих выходных векторах ![]() называется градиентный спуск в пространстве операторов
называется градиентный спуск в пространстве операторов ![]() и
и ![]() с целевой функцией
с целевой функцией  . В этом случае траектории операторов, рассматриваемых как матрицы,
. В этом случае траектории операторов, рассматриваемых как матрицы, ![]() и
и ![]() задается автономной системой обыкновенных дифференциальных уравнений
задается автономной системой обыкновенных дифференциальных уравнений
 (1)
(1)
где:
![]() и
и ![]() матрицы, составленные из столбцов
матрицы, составленные из столбцов ![]() и
и ![]() соответственно,
соответственно, ![]() ,
, ![]() –начальное состояние, выбираются случайные матрицы. В работе [2] были построены точные решения системы (1) в случае одновременно диагонализируемых
–начальное состояние, выбираются случайные матрицы. В работе [2] были построены точные решения системы (1) в случае одновременно диагонализируемых ![]() (t) и
(t) и ![]() (t). В этом случае задача распадается на несколько простейших задач на плоскости. В этих задачах на плоскости
(t). В этом случае задача распадается на несколько простейших задач на плоскости. В этих задачах на плоскости ![]() (t) и
(t) и ![]() (t) являются функциями. Для иллюстрации траекторий обучения на плоскости в работе [2] было предложено рассматривать в качестве траекторий обучения персептрона кривые
(t) являются функциями. Для иллюстрации траекторий обучения на плоскости в работе [2] было предложено рассматривать в качестве траекторий обучения персептрона кривые ![]() на
на ![]() . Опишем эти кривые. Во-первых, система (1) имеет первый интеграл (т.е. не меняющуюся со временем величину) [1]:
. Опишем эти кривые. Во-первых, система (1) имеет первый интеграл (т.е. не меняющуюся со временем величину) [1]:![]() . Это означает, что каждая траектория лежит на гиперболе
. Это означает, что каждая траектория лежит на гиперболе ![]() , где постоянные
, где постоянные ![]() являются начальными данными A(0) и B(0). Во-вторых, множество решений уравнения
являются начальными данными A(0) и B(0). Во-вторых, множество решений уравнения ![]() имеет вид
имеет вид  .
.
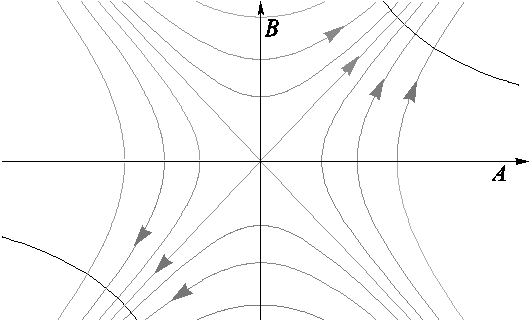
Рисунок 1. Траектории обучения ![]() ,
,![]()
Таким образом, траектории обучения одномерного персептрона лежат на ветви гиперболы вида
![]() и монотонно стремятся в точку пересечения с гиперболой вида .
и монотонно стремятся в точку пересечения с гиперболой вида .
В данной работе мы рассматриваем простейший случай, когда
![]() ,
, ![]()
![]() ,
,![]() ,
, ![]() . В этом случае система (1) также имеет первый интеграл
. В этом случае система (1) также имеет первый интеграл ![]() , который определяет гиперболоид или конус. Заметим, что этот гиперболоид (или конус) полностью определяется начальными данными
, который определяет гиперболоид или конус. Заметим, что этот гиперболоид (или конус) полностью определяется начальными данными ![]() системы (1). Тип поверхности первого интеграла – однополостный гиперболоид, двуполостный гиперболоид или конус –зависит от числа const. Во-вторых, все решения системы (1) имеют вид
системы (1). Тип поверхности первого интеграла – однополостный гиперболоид, двуполостный гиперболоид или конус –зависит от числа const. Во-вторых, все решения системы (1) имеют вид  ,
, ![]() , т.е. лежат на кривой (гиперболе) в пространстве. Ветви гиперболы решений пересекают гиперболоид первого интеграла в двух точках, которые являются точками притяжения траекторий решения. Наши численные эксперименты показывают, что для малых по модулю начальных данных p0, q0 и r0 типичная картина траекторий обучения приведена на рис. 2.
, т.е. лежат на кривой (гиперболе) в пространстве. Ветви гиперболы решений пересекают гиперболоид первого интеграла в двух точках, которые являются точками притяжения траекторий решения. Наши численные эксперименты показывают, что для малых по модулю начальных данных p0, q0 и r0 типичная картина траекторий обучения приведена на рис. 2.
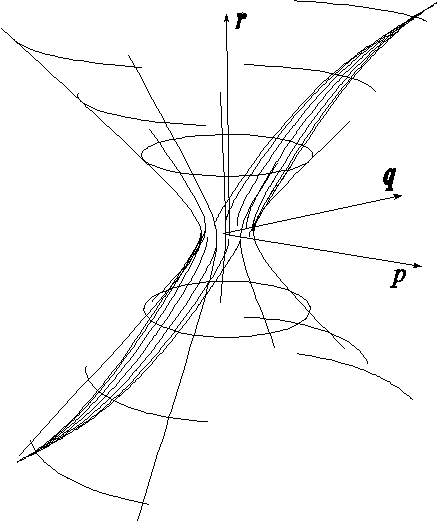
Рисунок 2. Траектории обучения ![]()
![]()
На рисунке 2 построены траектории с начальными данными на экваторе однополосного гиперболоида. Траектории разбились на две группы. Каждая группа траекторий сошлась к своей точке притяжения. В силу симметрии задачи и выбранных начальных данных рисунок получился симметричным.
Заключение
1. В работе [2] был рассмотрен случай одновременно диагонализируемых
![]() и
и ![]() . В этом случае анализ градиентного спуска сводится к анализу траекторий на плоскости, что было показано в [2]. В данной работе с помощью численных методов рассмотрены траектории обучения в случаях, которые не были охвачены работой[2].
. В этом случае анализ градиентного спуска сводится к анализу траекторий на плоскости, что было показано в [2]. В данной работе с помощью численных методов рассмотрены траектории обучения в случаях, которые не были охвачены работой[2].
2. В результате численных экспериментов для малых по модулю значений начальных данных p0, q0и r0 мы увидели, что траектории обучения
![]() и
и ![]() ведут себя как в диагонализируемом случае.
ведут себя как в диагонализируемом случае.
3. В ходе численных экспериментов не удается построить иллюстрирующие примеры эффектов переобучения и замедления обучения из-за локальных минимумов.
Список литературы:
1.Guo H., GelfandS.B.Analysis of gradient descent learning algorithms for multilayer feed forward neural networks // IEEE Transactions on Circuits and Systems. –1991. –Vol. 38.–№ 8.–P.883–894.
2.Saxe A.M., McClelland J.L., Ganguli S. Exact solutions to the nonlinear dynamics of learning in deep linear neural networks [Электронный ресурс].URL: http://arxiv.org/abs/1312.6120 (дата обращения 10.01.2016).
