Статья:




ПОНЯТИЕ «ПАРАЛЛЕЛЬНОЕ СМЕЩЕНИЕ», ЕГО МАТЕМАТИЧЕСКОЕ ОБОСНОВАНИЕ
Секция: 4. Космос, Авиация
Выходные данные
Разаков Р.Р. ПОНЯТИЕ «ПАРАЛЛЕЛЬНОЕ СМЕЩЕНИЕ», ЕГО МАТЕМАТИЧЕСКОЕ ОБОСНОВАНИЕ // Молодежный научный форум: Технические и математические науки: электр. сб. ст. по мат. XXXIII междунар. студ. науч.-практ. конф. № 4(33). URL: https://nauchforum.ru/archive/MNF_tech/4(33).pdf (дата обращения: 28.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

XXXIII Студенческая международная заочная научно-практическая конференция «Молодежный научный форум: технические и математические науки»
ПОНЯТИЕ «ПАРАЛЛЕЛЬНОЕ СМЕЩЕНИЕ», ЕГО МАТЕМАТИЧЕСКОЕ ОБОСНОВАНИЕ
Разаков Руфат Рустамбаевич
аспирант 3 курса кафедры «Эксплуатация воздушного транспорта» Санкт-Петербургский Университет Гражданской Авиации, РФ, г. Санкт-Петербург
Солодухин Виктор Александрович
научный руководитель, канд. техн. наук Санкт-Петербургский Университет Гражданской Авиации,
РФ, г. Санкт-Петербург
Огромное количество самолетов, летающее в небе, переплетаются в паутину, которое на первый взгляд может показаться не логичной и точно не поддающейся контролю и упорядочению. Однако, это не так! Весь самолетный поток движется в небе по четко установленным правилам и нормам, обеспечение которых возложено на службу движения. При всей компьютезированности современных лайнеров и систем контроля, человек до сих пор остается центом принятия решения, контроля и выдачи рекомендаций по обеспечению безопасности полетов, как в воздухе, так и на земле. Введение новых программ контроля и прогнозирования ситуаций в небе, существенно облегчало работу службы движения по безопасному разведению воздушных судов, однако не решило главное проблемы – увеличение пропускной способности зон управления воздушным движением без изменений структуры воздушного пространства. Современные системы контроля, такие как Альфа 3, Альфа 5, Теркас или Еврокат, способны отследить огромное количество воздушных судов, выдать необходимую информацию авиадиспетчеру, и даже спрогнозировать конфликт в небе, но они не способны применить эти действия к реальному разведению воздушный судов. Вся информация носит исключительно информационный характер, и вот тут-то, главное и окончательное решение принимает именно служба движения. На «Вооружение» и авиадиспетчеров существуют различные процедуры и меры для безопасного разведения воздушных судов в конфликтных точках, таких как – изменение эшелона полета, спрямление, регулировка скоростей и времени прохождения конфликтных точек конфликтующими самолетами, в не зависимости от их количества. Все эти способы давно описаны и хорошо изучены. Однако, при всем при этом, постоянное увеличение количество лайнеров в воздухе заставляет задуматься надо вопросом, а что ещё можно применить к разведению воздушных судов (ВС)? Как ещё можно обеспечить постоянный и не прерывный поток самолетов по существующим трассам?, не вгоняя авиакомпании в дополнительные траты на топливо, не нарушая план полета и комфорт пассажиров по резкому и частому изменения эшелона полетов в связи с конфликтностью движения. Пример возможности ответа на данные вопросы описан в этой статье.
Посмотрим на фотографию. Она взята со всеми известного сайта flightradar24.com. Глядя на эту фотографию, трудно представить, что все лайнеры выполняют полеты, не меняя свой план полета, и не нарушая комфорт пассажиров. Решение упорядочного и плавного потока всей этой массы самолетов, достигается точным и своевременным выполнением команд службы движения. Где на ряду с изменением эшелона полета, полета ВС в виражах и в зонах ожидания, для ВС выполняющих заходы на посадку и взлеты, применяется так же процедура «параллельного смещения», при полетах ВС по трасам на дальние дистанции.

Рисунок 1. Воздушная обстановка над Европой
Данная процедура широко применяется в странах Европы, и хотя она описана в Руководящих документам РФ, но почему то не носит массовый характер применения. Рассмотрим более подробно:
Что такое «параллельное смещение»?! Полет современных лайнеров и их пространственное положение, выдерживается и обеспечивается бортовым компьютером, в котором наряду с огромным числом датчиком и электроники, присутствует и GPS навигатор (определение места самолета по спутнику). Этот прибор как раз и предназначен для информирования бортового компьютера о пространственном положении ВС, относительно оси трассы. 99% современной авиатехники оборудованы данными датчиками. Полет выполняется строго по оси трассы. И вот как раз отклонение от полета по трассе и есть «параллельное смещение». Выполнение данной процедуры, не требует введение каких-то новых норм эшелонирования, или введение дополнительное оборудования контроля за выдерживанием данного отклонения полета от оси трасы на рабочих местах авиадиспетчеров. В руководящих документах Экипажей данная процедура носит название «Offset», и выполняется простым «накручиваем» датчика контроля полета по оси трассы, на необходимое отклонение от оси, вправо или влево, выраженное в километрах или милях. Зачастую, данное решение применяется во избежание попадания самолета в спутную струю впереди идущего лайнера. Возникает вопрос, если экипажи могут без особых усилий в изменении плана полета, отклоняться от оси трасы, на выбранную дистанцию, почему же данная процедура не используется в РФ, как альтернатива разведения ВС в пределах одной трассы?! Вопрос остается открытым …
В описании ниже, я постарался описать полеты ВС по параллельным траекториям в пределах одной трассы и пределах средств контроля за полетами, по зональной трассе.
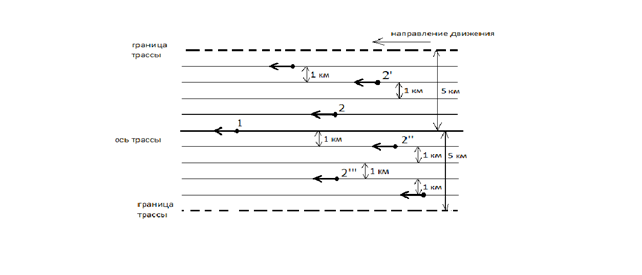
Рисунок 2. Схематическое изображение различных положений Воздушных судов
На данном рисунке 2 изображено схематическое движение воздушного судна (1), и различные пространственные положения воздушного судна (2), при выполнении им процедуру Offset (параллельное смещение). Отклонение происходит на минимальное значение в 1 км (либо в 1 м.милю), но не далее границ воздушной трассы. Кстати, об этом … воздушны трассы пронизывающее небо над нашими головами, условно делятся на трасы для полетов по зональной навигации, трассы оборудованные средствами навигации и не оборудованные такими средствами. Разница заключается лишь в ширине таких трасс (оборудованных средствами навигации – 10 км, не оборудованными – 20 км, и трассы выделенные для полетов по зональной навигации до 35 км в обе стороны от оси трассы). Таким образом, как видно на рис. 2, в пределах одной трассы, на определенном участке, могут выполнять полет огромное количество ВС, с минимальным отклонением в 1 км, но при этом их число не может быть бесконечным. Вы спросите почему?, ответ прост… каждый самолет оборудован системой предупреждения столкновения ( СПОС – анг. Абривиатура TCAS). И именно эта система не позволит самолетам сблизиться на расстояние менее 10 км друг от друга, без изменения профиля полета. Как это показано на рис 3.
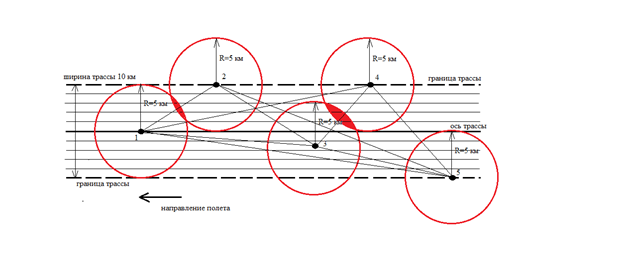
Рисунок 3. Параллельное смещение при действии TCAS
На данном рисунке изображено различное положение 5-ти воздушных судов при выполнении ими процедуры «Offset» в пределах одной трассы. Так к примеру пара ВС 1-3 является безопасной для выполнения полетов по смещенной траектории, и наоборот, пара ВС 3-4 такой не является, так как происходит взаимное пересечение зон действия TCAS (красные круги). Таким образом, для удовлетворения всех условий комфортное и безопасного полета ВС по смещенным траектория (Offset), необходимо, что бы «Красные круги» не пересекались. Так чтобы минимальное расстояние по боковому разведению было не менее 5 км от каждого самолета (зона действия TCAS ограничена 5-ю км вокруг каждого ВС). Такими же являются и нормы бокового эшелонирования, при пересечении встречно-занятых и попутно-занятых эшелонов (не менее 10 км в момент пересечения), как и описано в руководящих документах РФ. Т.е. если между параллельно движущимися ВС по боковому интервалу будет не менее 10 км, ВС расходятся безопасно и без изменения профиля полета под действием TCAS. Практика воспроизведение этой ситуации на тренажере это и доказывает. Таким образом, в пределах скажем одной трассы, обеспеченной для полетов по зональной навигации можно разместить до 6 воздушных судов (пронумерованы от 1 до 6 с вариантами смещения как в право, так и в лево в пределах одной трассы, при их одновременном параллельном расположении), при учете что эти самолеты не помешают полетам других воздушных судов, как это и показано на рис. 4.

Рисунок 4. Распределение ВС в пределах одной трассы
В Реальности, на практике, выполнение процедуры «параллельного смещения», могло бы существенно облегчить процедуру разведения воздушных судов, следующих на одном эшелоне с различными скоростями, в пределах одной трассы. Так, к примеру, на рис. 5, показано практические применение метода параллельного смещения, в частности при обгоне более скоростным воздушным судном менее скоростного воздушного судна, в пределах одной трассы, с сохранением профиля и параметром полета. Где, под номером 1 указан аэробус 330, следующий со скоростью в 458 узлов и скоростью по Маху 0,81. Под номером 2 в различных его положениях, следует воздушное судно Боинг 747, со скоростью в 480 узлов и скоростью по Маху 0,83. Без применения процедуры «параллельного смещения», решением данной конфликтной ситуации, было б изменение эшелона полета одним из самолетов, а то время как с параллельным смещением, оба ВС сохраняют свои профиля полета и экономически выгодные эшелона полета.

Рисунок 5. Применение “Offset” на практике
Распишем уравнения движения двух объектов в дифференциальной форме:
Движение второго ВС относительно первого ВС описывается следующим уравнением:


 угол отклонения от оси трассы для выхода на параллельную траекторию
угол отклонения от оси трассы для выхода на параллельную траекторию
Расстояние между ВС равно
 .
.
Время прохождения минимального расстояние между ВС определяется с помощью дифференцирования
 .
.
Отсюда
 ,
,
 ,
,
Тогда минимальное расстояние:







Данное уравнение описывает движение и расчет расстояния только между 2-мя самолетами. Увеличении их до числа в 6 ВС, уравнение переписывается с большим количеством переменных.
Хочется добавить, что увеличение количества ВС больше значения 6, приведет к выходу ВС за пределы установленных границ полета по трассе, а следовательно, к снижению уровня безопасности полета. Для решения данной дилеммы и повышению уровня безопасности полетов, необходимо полностью менять структура воздушного пространства, переписывать документы регламентирующие работу служб движения, увеличивать зону покрытия локаторов и разрешающую способность по азимуту, и разрешающую способность по дальности.
Список литературы:
1. Инструкция по TCAS (Система предупреждения опасного столкновения).
2. Федеральные авиационные правила выполнения полетов в воздушном пространстве РФ. 31 марта 2002 года, № 136/42/51.
3. Федеральные авиационные правила организации воздушного движения РФ. Приказ Минтранса РФ от 25 ноября 2011 г. № 293.
4. Doc 9689. Руководство по методике планирования воздушного пространства для определения минимумов эшелонирования.
5. Doc 9992. Руководство по использованию навигации, основанной на характеристиках (PBN), при построении воздушного пространства.
6. www. Flightradar24.com.
