ПРОЕКТИРОВАНИЕ ОПТИМАЛЬНОГО ВИНТА ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА МАЛОРАЗМЕРНОГО ТИПА
Конференция: LXXXIII Международная научно-практическая конференция «Научный форум: инновационная наука»
Секция: Технические науки

LXXXIII Международная научно-практическая конференция «Научный форум: инновационная наука»

ПРОЕКТИРОВАНИЕ ОПТИМАЛЬНОГО ВИНТА ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА МАЛОРАЗМЕРНОГО ТИПА
DESIGNING AN OPTIMAL PROPELLER FOR A SMALL-SIZE UNMANNED AERIAL VEHICLE
Alexander Kovalenko
Candidate of Technical Sciences, Lecturer, Military Academy of Air and Space Defense, Russia, Tver
Ekaterina Tikhonova
Cadet, Military Academy of Air and Space Defense, Russia, Tver
Аннотация. В этой статье будет рассмотрено как можно писать физику процессов, происходящих при полете беспилотного летательного аппарат малоразмерного типа.
Даются математические зависимости тяги винта, мощности двигателя. Создается алгоритм для оптимального расчета винта-моторной группы для БПЛА малоразмерного типа.
Abstract. In this article it will be considered how it is possible to write the physics of the processes occurring during the flight of an unmanned aircraft of a small-sized type. Mathematical dependencies of propeller thrust, engine power are given. An algorithm for optimal calculation of propeller-engine group for UAV of small-size type is created.
Ключевые слова: квадрокоптер, лопасти, максимально допустимый радиус винта, максимальное значение коэффициента нагрузки, тяга винта.
Keywords: quadrocopter, blades, maximum allowable propeller radius, maximum load factor value, propeller thrust.
Квадрокоптер – это электромеханическая система, корпус которой можно моделировать твердым телом с 6-ю степенями свободы.
Квадрокоптеры, в отличие от БПЛА вертолетного типа традиционной продольной схемы с несущим и рулевым винтами и аппаратов соосной схемы, обладают рядом достоинств, таких, как простота и надежность конструкции.
Каждый из двигателей создает силу тяги Fi (i= 1,2,3,4), величина которой регулируется изменением уровня напряжения на двигателях.
В рассматриваемой конструкции векторы Fi имеют соответствующие проекции (Fix,Fiy,Fiz) на систему координат связанную с корпусом.
Правильная направленность векторов Fi открывает широкие возможности для компенсации внешней ветровой нагрузки, действующей на корпус робота.
Расчет характеристик винтовой группы можно условно разделить на два последовательных этапа.
На первом этапе определяется предполагаемый радиус, тяга и КПД винта.
Исходные данные для проведения первого этапа: Располагаемая мощность двигателя N, Вт; частота вращения винта Ω, 1/с; максимально допустимый радиус винта Rгр, м; расчетная скорость винта V0, м/с; максимально допустимая окружная скорость винта Uк.гр, м/с; плотность воздуха ρ, кг/м3; исходный желаемый КПД ηж; шаг снижения, желаемого КПД Δηж.
На основании исходных данных последовательно определяются:
Требуемое значение осевого КПД.; максимальное значение коэффициента нагрузки, при котором можно получить желаемой значение осевого КПД; тяга, которую будет иметь винт на скорости V0, при заданном значении предполагаемого КПД; минимальное значение ометаемой площади; наименьший радиус винта.
Если потребный радиус окажется больше граничного, то это значит,
что первоначально заданный КПД не может быть получен.
В таком случае, необходимо уменьшить желаемый КПД на шаг снижения и повторить цикл, начиная с определения нового значения осевого КПД. Цикл повторяется до тех пор, пока не выполниться условие R ≤ Rгр.
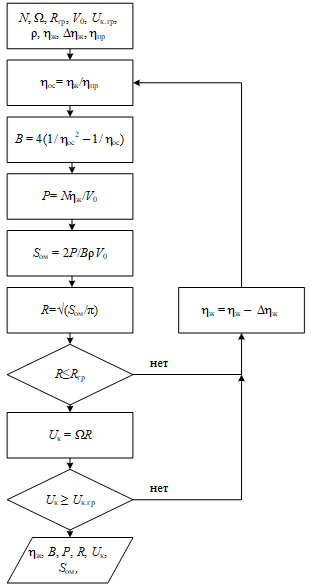
Рисунок 1. Первый этап расчета винта-моторной группы
После определения значений радиуса, тяги и КПД винта можно переходить ко второму этапу.
Целью второго этапа расчета является определение тяги, потребляемой мощности и геометрических размеров воздушного винта.
Исходные данные для второго этапа расчета:
Располагаемая мощность двигателя N, Вт; частота вращения винта Ω, 1/с; максимально допустимый радиус винта Rгр, м; расчетная скорость винта V0, м/с; число лопастей винта i; предполагаемый радиус винта R, м; тяга винта P, H.
Для проведения расчетов лопасть разбивается на конечное число участков с размерами bΔR.
При этом считается, что на каждом выбранном участке закрутка лопасти отсутствует, а скорости и углы набегания потока
по радиусу – не меняются.
При уменьшении ΔR, то есть при увеличении числа рассматриваемых участков, погрешность, вызванная принятым допущением, уменьшается.
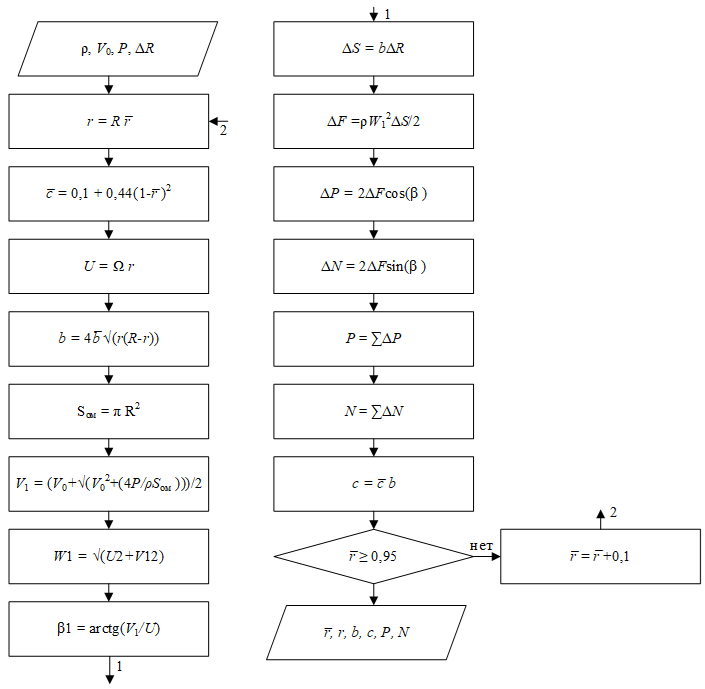
Рисунок 2. Второй этап расчета винта-моторной группы
Таким образом, по новому интуитивно понятному алгоритму, можно получить ответы по возможному перечню параметров лопастей и режимов работы винта квадрокоптера.
