Электронный корректор осанки
Конференция: X Международная научно-практическая конференция «Научный форум: инновационная наука»
Секция: Технические науки

X Международная научно-практическая конференция «Научный форум: инновационная наука»

Электронный корректор осанки
Electronic posture corrector
Grigory Volkov
student of the magistracy, physics and mathematics faculty, Mari State University, Russian Federation, Yoshkar-Ola
Ksenia Nazarova
student of the magistracy, physics and mathematics faculty, Mari State University, Russian Federation, Yoshkar-Ola
Vladimir Izikov
doctor of Technical Sciences, Professor, Volga State Technical University, Russian Federation, Yoshkar-Ola
Аннотация. В работе рассмотрены технологические особенности правильного положения осанки человека с помощью автоматического корректора осанки с максимальной доступностью устройства. Правильное положение спины способствует улучшению состояния человека как духовном, так и в физическом смысле. Также в статье рассмотрена замена дорогостоящим аналогичным устройствам на основе гироскопа ADXL345. Управляющим устройством является микропроцессорный комплект Arduino NANO V3 на базе микропроцессора ATmega328. Рассмотрены преимущества данного устройства. Подробно изложена структурная схема, преобразующая поступивший сигнал с гироскопа на Arduino, а далее на вибромотор.
Abstract. In work technological features of the exact provision of a bearing of the person by means of an automatic zero adjuster of a bearing with the maximal availability of the device are considered. The exact position of a back promotes improvement of a condition of the person as spiritual, and in physical sense. Also in article replacement to expensive similar devices on the basis of ADXL345 gyroscope is considered. The actuation device is the microprocessor set of Arduino NANO V3 on the basis of the ATmega328 microprocessor. Advantages of this device are considered. Explicitly the block diagram transforming the entered signal from a gyroscope on Arduino, and further on the vibromotor is explained.
Ключевые слова: ортопедические изделия; коррекция осанки; управляющее устройство; гироскоп; датчик; вибромотор; измерение положения тела.
Keywords: orthopedic products; posture correction; actuation device; gyroscope; sensor; vibromotor; measurement of position of a body.
Всем известно, что первое впечатление нельзя произвести дважды. Первое, на что человек образует внимание при знакомстве, – это умение держать себя. Невербальные сигналы способны рассказать о человек больше, чем его слова. Прямая спина, развернутые плечи свидетельствуют об уверенности человека. Кроме того, ученые установили связь между положением спины и душеным состоянием. Опущенные плечи, поникшая голова способны испортить даже самое чудесное настроение, и наоборот, стоит при хандре развернуть плечи, поднять голову, как через некоторое время тоска ослабевает, а потом и отступит.
По мимо эстетики и невербального общения правильная осанка важна для здоровья. 63 % людей с нарушениями осанки страдают от болей в пояснице, 53 % - в шее, у 38 % болят плечи. Перенапряженные из-за неправильной позы мышцы часто спазмируются, вызывая головные боли мышечного напряжения.
Очень большое значение правильное положение спины имеет прежде всего для детей. Если ребенок с детства привыкает держать спину неправильно, то последствия могут быть неизгладимыми, например, сколиоз или кифоз. К сожалению, самоконтроля обычно бывает недостаточно для того, чтобы выработать привычку правильно держать спину. На уроках учитель не всегда может вовремя заметить, что ребенок сидит криво, поскольку некоторые классы доходят до 35 человек. К тому же ребенку для самоконтроля во время занятий приходится траться часть своего внимания, чтобы следить за собой, снижая свою концентрацию. Родители в основном могут сидеть со своими детьми вечером после работы. В это время суток у людей внимание понижено, поэтому родители тоже не всегда своевременно могут сказать ребенку, чтобы он выпрямил спину. Поэтому самым оптимальным решением будет покупка прибора для того, чтобы он непосредственно отслеживал изменения положение спины и сообщал о них световым, звуковым сигналом или вибрацией.
Целью данной статьи является исследование и разработка устройства для правильного положения спины и плеч человека – электронный корректор осанки. Электронные корректоры осанки закрепляются на белье или коже груди, обычно под ключицей. Прибор фиксирует правильное положение тела, и реагирует на отклонение от запомненной «нормы», начиная вибрировать.
На сегодняшнем рынке существует несколько приборов такого типа. Например, «Мастер осанки» производства России. Его средняя цена 3800 рублей. Стоимость прибора высока, поэтому и требуется разработать электронный корректор осанки по максимально доступной цене, но с функциональностью более дорогих устройств.
Для создания прибора требуется его основной датчик – электронный гироскоп. Таким датчиком является гироскоп ADXL345. Его характеристики:
· Микросхема: MPU-6050
· Напряжение питания: 3 – 5 В
· Цифровой интерфейс: I2C 400 кГц
· Формат выходных данных: углы Эйлера, кватернионы, матрица поворота или необработанные данные
· Встроенный датчик температуры
· Рабочий диапазон гироскопа: ±250, ±500, ±1000, и ±2000 угл.град/с
· Рабочий диапазон акселерометра: ±2, ±4, ±8 и ±16 g
· Чип встроенный 16-битный АЦП, 16 бит вывода данных
· Расстояние между контактами: 2,54
· Размеры: 2,0×1,6×0,3 см
MPU-6050 трехосевой аналоговый гироскоп и трехосевой акселерометр для Arduino содержит в себе сразу два датчика. Акселерометр определяет ускорение, а гироскоп – ориентацию в пространстве тела, на котором он установлен.
Гироскоп является устройством, которое реагирует на изменение углов ориентации контролируемого тела. Акселерометр представляет собой устройство, измеряющее проекцию кажущегося ускорения, то есть разницы между истинным ускорением объекта и гравитационным ускорением. В данном устройстве гироскоп и акселерометр используются вместе для получения дополняющей друг друга информации. Таким образом данные от этих приборов будут более корректные и достоверные, чем использование показаний от одного из датчиков.
Считывание данных от устройств может происходить двумя путями. Измерения могут быть взяты из регистров хранения или получены из функций FIFO микросхемы MPU-6050.
Микросхема MPU-6050 содержит Digital Motion Processor (DMP), необходимый для обработки данных, которые передаются от датчиков гироскопа и акселерометра. Все это делается для повышения точности получаемых данных.
В качестве управляющего устройства в данном проекте можно выбрать микропроцессорный комплект Arduino Nano на базе микропроцессора ATmega328. Данное устройство имеет ряд преимуществ:
1) наличие на рынке и низкая стоимость;
2) наличие встроенного языка программирования микроконтроллера и интегрированной среды разработки, предоставляемой бесплатно, что дает широкие возможности разработки и гибкость программной составляющей;
3) наличие интерфейсов обмена данными как в цифровом (USBI2C), так и в аналоговом виде;
4) широкий ассортимент дополнительного оборудования для телеметрии и исполнительных устройств;
5) большое количество программных библиотек для работы с компонентами;
6) наличие на плате интерфейсных разъемов.
Для предупреждения пользователя о неправильном положении спины нужен небольшой вибромотор, который начинает вибрировать при этом.
Структурная схема разрабатываемого устройства состоит из управляющего устройства, гироскопа, плоского вибрационного микромотора, двух аккумуляторов ёмкости, достаточной для полноценной работы устройства 6-8 часов, и выключателя. Сигнал с трехосного гироскопа поступает на Arduino. С помощью, вшитой в него программы, Arduino дает сигнал на вибромотор, который выполняет роль индикатора неправильного положения осанки. Схема устройства представлена на рисунке 1.
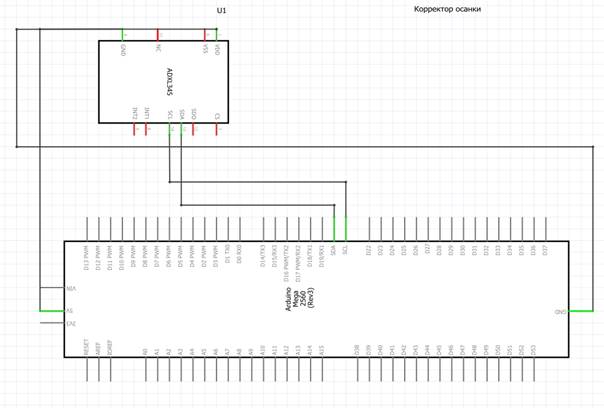
Рисунок 1. Принципиальная схема устройства
У электронных корректурой осанки преимуществ будет гораздо больше, чем у традиционных ортопедических изделий. Рассмотрим их более подробно:
1. Незаметность (Электронный корректор можно разместить на одежде в виде красивого аксессуара или спрятать под нее. Большинство ортопедических корректоров представляет собой большие бандажи, которые закрепляются почти по всех поверхности спины, что существенно снижает возможность носить некоторые виды одежды, так как в проймах горловины или рукавов будут выступать неэстетичные лямки.)
2. Отсутствие возрастных ограничений (Один и тоже электронный корректор могут использовать как взрослые, так и дети. Ортопедические корректоры покупаются в соответствии с возрастом и комплекцией.)
3. Простоты в использование (Электронный корректор позволяет вырабатывать привычку держать спину прямо, не полагаясь на внешние приспособления. При любых отклонениях от нормы корректор будет сообщать об этом в удобной форме. В отличие от ортопедических корректоров он не сковывает движения и позволяет использовать себя в любых ситуациях.)
