МЕТОД АВТОМАТИЧЕСКОЙ ОЦЕНКИ ПОГРЕШНОСТИ НАВЕДЕНИЯ СВЕТОВОГО ЛУЧА НА ОСНОВЕ КОМПЬЮТЕРНОГО ЗРЕНИЯ
Конференция: LXXXVIII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Информатика, вычислительная техника и управление

LXXXVIII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
МЕТОД АВТОМАТИЧЕСКОЙ ОЦЕНКИ ПОГРЕШНОСТИ НАВЕДЕНИЯ СВЕТОВОГО ЛУЧА НА ОСНОВЕ КОМПЬЮТЕРНОГО ЗРЕНИЯ
Аннотация. Предложен метод автоматической оценки погрешности наведения светового луча в сценическом пространстве на основе технологий компьютерного зрения. Алгоритм использует обработку изображений камеры для распознавания центра светового пятна прожектора, преобразования его координат в реальную систему отсчёта и расчёта погрешности наведения относительно целевой точки по евклидову расстоянию. Реализация выполнена с применением библиотеки OpenCV, включая фильтрацию изображений, поиск контуров и построение ограничивающих прямоугольников. Метод применим для задач управления театральным освещением и определения зон эффективной работы оборудования.
Ключевые слова: сценическое пространство, театральное освещение, компьютерное зрение, автоматизированная оценка погрешности, наведение светового луча.
Введение
Одной из важных задач театрального освещения является слежение с помощью светового луча за актерами и другими динамическими объектами. Существует ряд решений для автоматизации этого процесса с использованием технологий машинного зрения, радио-позиционирования и других [1-4].
Точность наведения светового луча в требуемую точку сценического пространства является ключевой характеристикой подобной системы и напрямую влияет на качество работы многих методов управления.
Для тестирования используется технология наведения светового луча по точке изображения сцены [5].
Предлагается метод для автоматической оценки погрешности наведения светового луча на основе компьютерного зрения.
Материалы и методы
Исследования проводились в лаборатории Государственного университета «Дубна». Процесс автоматического замера погрешности наведения светового луча в лаборатории представлен на рисунке 1.

Рисунок 1. Автоматический метод замера погрешности наведения светового луча
На рисунке показано положение лампы на сцене. Надпись offset – смещение относительно заданного центра, на рисунке 0,3 м. В опытах исследована погрешность от дальности наведения светового луча для чего изменялось расстояние от центра до светового оборудования от 1,0 до 8,0 м.
Валидация точности работы алгоритма строится на проведении тестирования в 2 режимах – ручном и автоматизированном.
Ручной режим подразумевает ручные замеры отклонения центра светового луча от заданной координаты.
Автоматический режим реализован на основе распознавания светового пятна прожектора на изображении камеры и последующем нахождении координат центра пятна. Алгоритм автоматического расчета погрешности наведения реализован с использованием библиотеки алгоритмов компьютерного зрения и численных алгоритмов OpenCV [6].
После первичной фильтрации изображения применяется алгоритм поиска контуров, позволяющий определить замкнутые области, соответствующие целевым объектам. Среди найденных контуров отбираются те, которые по площади превышают заданный порог. Далее, на основе отобранных контуров строятся минимальные ограничивающие прямоугольники (bounding boxes), из которых вычисляется предполагаемый центр падения луча:
![]() (1)
(1)
Следующим этапом является преобразование полученной экранной точки в реальные координаты сцены. Погрешность определяется как евклидово расстояние между реальными координатами точки падения луча и координатами целевой точки
![]() (2)
(2)
Полученная величина ε и есть метрика точности системы наведения.
Погрешность наведения в зависимости от удаления прибора от целевых координат.
Показатель точности в рамках расстояния точки падения луча от прибора до целевой точки определялся по формуле (3)
![]() , (3)
, (3)
где ![]() — целевая точка, а
— целевая точка, а ![]() — точка падения светового луча.
— точка падения светового луча.
Результаты и их обсуждение
Для выявления погрешности работы автоматического режима относительно ручного был проведен ряд замеров одной и той же точки пространства с использованием предложенных методов. Результаты замеров представлены в Таблице 1.
Таблица 1.
Сравнение показаний ручного и автоматического методов замера погрешности наведения светового луча
|
N |
Фактические координаты точки пространства, м |
Результаты измерения, м |
||
|
X |
Y |
ручной замер, Mi |
автоматический замер, Аi |
|
|
1 |
1,544 |
1,793 |
0,152 |
0,120 |
|
2 |
2,739 |
1,798 |
0,057 |
0,0789 |
|
3 |
0,441 |
4,090 |
0,346 |
0,348 |
|
4 |
3,007 |
-0,901 |
0,128 |
0,125 |
|
5 |
2,476 |
2,3087 |
0,071 |
0,0795 |
|
6 |
4,810 |
-1,120 |
0,202 |
0,196 |
На основе полученных данных была рассчитана средняя погрешность автоматического метода измерения относительно ручного:
![]() , (4)
, (4)
где:
![]() — результат автоматического измерения для i-го опыта,
— результат автоматического измерения для i-го опыта,
![]() — результат ручного измерения для i-го опыта,
— результат ручного измерения для i-го опыта,
n — количество замеров.
В результате было установлено, что погрешность автоматического метода измерения относительно ручного составляет в среднем 0,012 м, что составляет ошибку в 0,15% относительно диагональной длины сцены, которая равна 11,6 м.
Автоматизированное тестирование позволило провести площадное тестирование погрешности наведения. Было проведено несколько замеров, как для различного оборудования, размещенного в различных точках полигона, так и используя различную плотность замеров. По результатам была построена карта полигона (рисунок 2), на которой можно увидеть закономерность роста погрешности от дальности наведения светового луча.
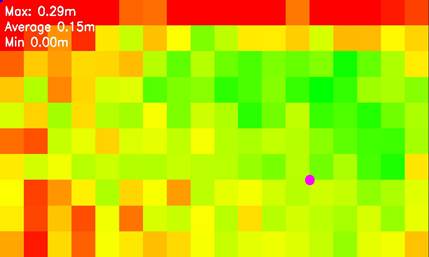
Рисунок 2. Тепловая карта погрешности наведения луча
Тепловая карта визуализирована с использованием градиентной цветовой палитры. На тепловой карте изображена точка – положение лампы на сцене. Цветовой градиент означает величину погрешности, зеленый – минимум, красный – максимум. Абсолютный максимум составил 0,29 м., средняя погрешность – 0,15 м.
По результатам опытов был получен график погрешности наведения относительно расстояния от прибора, который представлен на рисунке 3.
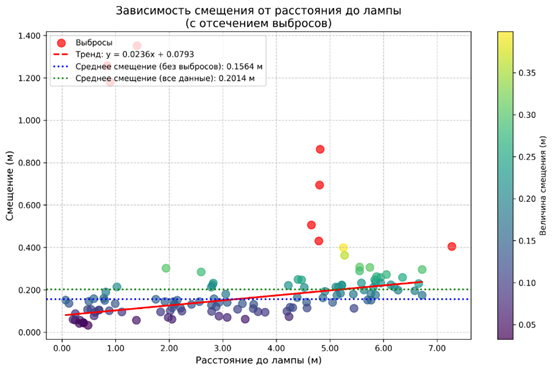
Рисунок 3. График зависимости смещения наведения луча от удаления источника света
Величина смещения до 0,10 м характерна для расстояния до лампы до 2,0 м. Величине смещения от 0,20 м до 0,35 м характерна для расстояния от 4,0 м до 7,0 м.
Результаты тестирования показали, что смещение наведения луча увеличивается относительно расстояния до светового оборудования, следовательно точность снижается так же линейно. Среднее смещение наведения от расстояния до источника света составило 0,156 м.
Выводы
На основе полученных данных была установлена предельная зона эффективной работы прибора при освещении сценического пространства. Для заданных параметров системы дальность составила 8 метров. В этом диапазоне погрешность наведения в среднем составляет 0,156 м что составляет 2% в масштабах полигона.
Предложенный метод может использоваться в различных задачах, относящихся к методам управления сценическим пространством.
