ЭКСПЕРИМЕНТАЛЬНАЯ ОЦЕНКА ЧАСТОТЫ ОШИБОК ПРИ SERIAL-ОБМЕНЕ В ПРОЕКТАХ НА ПЛАТФОРМЕ ARDUINO
Конференция: XCV Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Информатика, вычислительная техника и управление

XCV Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»

ЭКСПЕРИМЕНТАЛЬНАЯ ОЦЕНКА ЧАСТОТЫ ОШИБОК ПРИ SERIAL-ОБМЕНЕ В ПРОЕКТАХ НА ПЛАТФОРМЕ ARDUINO
EXPERIMENTAL EVALUATION OF THE FREQUENCY OF SERIAL-EXCHANGE ERRORS IN ARDUINO PROJECTS
Romanov Daniil Sergeevich
Student, National Research University "MIET", Russia, Zelenograd
Аннотация. В статье рассматриваются факторы, влияющие на надёжность последовательного обмена в проектах на платформе Arduino. Представлены результаты экспериментальной оценки частоты ошибок при передаче данных в зависимости от скорости обмена, аппаратного согласования и программной обработки входящего потока. Показано, что рост скорости и нагрузки на контроллер приводит к увеличению числа искажённых сообщений, что необходимо учитывать при проектировании измерительных и управляющих систем.
Abstract. The article discusses the factors affecting the reliability of serial communication in projects based on the Arduino platform. The results of an experimental assessment of the error rate during data transmission, depending on the exchange rate, hardware matching, and software processing of the incoming stream, are presented. It is shown that an increase in speed and load on the controller leads to an increase in the number of distorted messages, which should be taken into account when designing measurement and control systems.
Ключевые слова: Arduino, Serial-обмен, UART, частота ошибок, последовательный порт, надежность передачи данных, baud rate, микроконтроллер.
Keywords: Arduino, Serial communication, UART, error rate, serial port, data transfer reliability, baud rate, microcontroller.
Введение
Платформа Arduino широко применяется в учебных, инженерных и прикладных проектах благодаря открытой архитектуре, доступности и удобству быстрой разработки. Одним из наиболее востребованных механизмов взаимодействия в таких системах остается UART-связь, на основе которой строится Serial-обмен между микроконтроллером и внешними устройствами. Для практических задач этот канал важен своей простотой и возможностью оперативной передачи команд, результатов измерений и служебных сообщений [1].
Актуальность темы определяется тем, что при работе последовательного интерфейса корректность обмена зависит от совпадения скорости приема и передачи, правильного подключения линий RX и TX, а также от стабильности аппаратных и программных параметров канала. Даже небольшое рассогласование способно вызывать искажение данных, а при росте скорости обмена вероятность сбоев становится более заметной. По этой причине оценка частоты ошибок представляет практический интерес для проектов на платформе Arduino, особенно в тех случаях, когда передаваемые данные используются для управления устройством или регистрации результатов эксперимента [2].
С технической точки зрения последовательный обмен остается чувствительным к настройкам среды и особенностям передачи данных. В литературе подчеркивается, что при работе через UART важны одинаковая скорость на стороне передатчика и приемника, корректный формат кадра и соблюдение допустимых условий связи. Для Arduino такие требования особенно значимы, поскольку ошибка в настройке порта или в организации чтения входящего потока может привести к нарушению приема отдельных символов и целых сообщений [3].
Цель исследования состоит в оценке влияния параметров передачи данных на надёжность последовательного обмена в проектах на платформе Arduino.
Для достижения поставленной цели решаются две задачи:
- рассмотрение теоретических основ последовательного обмена и факторов, влияющих на появление ошибок;
- проведение экспериментальной проверки и анализом зависимости частоты ошибок от условий передачи данных.
Объектом исследования выступает Serial-обмен в проектах на платформе Arduino, а предметом исследования являются ошибки приема и передачи данных, возникающие в процессе такого обмена [4].
Практическая значимость исследования усиливается тем, что в среде Arduino обмен с компьютером часто используется для вывода сообщений и для ввода управляющих данных, команд и параметров работы программы. В таких условиях даже единичные ошибки могут менять логику работы устройства, особенно если считывание осуществляется в реальном времени.
1 Теоретические основы Serial-обмена и причины возникновения ошибок проекта проектах на платформе Arduino.
Последовательный обмен в проектах на Arduino строится вокруг достаточно простой логики. Скорость передачи задается функцией Serial.begin(speed), после чего плата может передавать и принимать данные через стандартный последовательный интерфейс. Именно эта простота делает Serial-обмен удобным для настройки, отладки и связи с компьютером, но одновременно создает риск недооценки технических ограничений канала. Когда разработчик воспринимает такой обмен как полностью надежный по умолчанию, вероятность ошибок начинает зависеть уже не от самой идеи интерфейса, а от точности его настройки и условий работы конкретного проекта [1].
Практика использования Arduino в измерительных задачах показывает, что последовательный канал часто становится частью самого экспериментального контура. Через него на компьютер отправляются результаты измерений, а обмен может идти в режиме виртуального COM порта. В таком случае ошибка Serial-обмена перестает быть локальной программной мелочью и начинает влиять на достоверность всего получаемого массива данных. Если при передаче искажается даже небольшая часть значений, итоговая картина процесса уже может восприниматься неверно [2].
С аппаратной стороны устойчивость обмена определяется правильностью подключения и согласованием интерфейсов. Для Arduino Uno ключевую роль играют линии 0 RX и 1 TX, которые используются для приема и передачи данных. При соединении двух устройств линии должны быть подключены перекрестно, а при сопряжении с RS 232 требуется преобразование уровней, поскольку логика самого микроконтроллера и компьютерного интерфейса не совпадает. Ошибка на этом уровне приводит уже не к редким сбоям, а к систематическому нарушению приема и передачи [3].
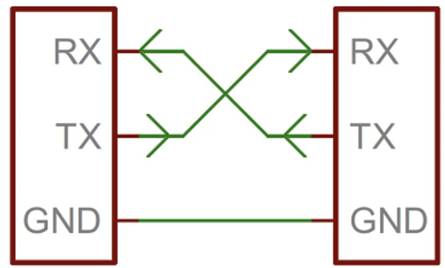
Рисунок 1. Правильное подключение RX и TX
Не менее важна и временная сторона обмена. UART работает как асинхронный интерфейс, где полезные данные сопровождаются стартовым и стоповыми битами, а правильный прием возможен лишь при совпадении скорости передатчика и приемника. В учебном пособии по программированию микроконтроллеров прямо отмечено, что допустимое расхождение частот ограничено, а диапазон используемых скоростей включает как низкие, так и достаточно высокие режимы вплоть до 115200 бит в секунду. Отсюда следует понятный вывод. Чем выше скорость и чем хуже согласованы параметры, тем выше чувствительность канала к ошибкам чтения [4].
С программной точки зрения источник ошибок нередко скрыт в самой организации работы скетча. В материалах по Arduino IDE подчеркивается, что монитор порта должен работать на той же скорости, которая задана в Serial.begin(9600), а более высокие скорости задействуют больше ресурсов контроллера и чаще вызывают прерывания, из-за чего основная программа может выполняться медленнее. По этой причине причины ошибок удобно представить в виде сводной таблице 1, где видно, что сбой может возникать и в аппаратной, и в программной части проекта.
Таблица 1.
|
Фактор |
Как возникает ошибка |
Типичное проявление |
|
Неверно выбранная скорость обмена |
Параметр Serial.begin не совпадает с настройкой на принимающей стороне |
Нечитаемые символы, искаженные сообщения |
|
Рост нагрузки на контроллер при высокой скорости |
Передача и обработка данных требуют больше ресурсов и чаще вызывают прерывания |
Пропуски данных, нестабильный прием |
|
Неправильное подключение RX и TX |
Линии соединены неверно или не обеспечено общее согласование канала |
Полное отсутствие обмена или постоянные сбои |
|
Несовпадение временных параметров UART |
Приемник и передатчик работают с разной скоростью и нарушают структуру кадра |
Ошибки чтения отдельных байтов |
|
Некорректная обработка входящих данных в программе |
Скетч читает символы и команды без достаточного контроля последовательности приема |
Неверная интерпретация команд и числовых значений |
Анализ представленных факторов показывает, что ошибка Serial-обмена почти никогда не имеет одну причину. На практике аппаратная схема, скорость порта и логика программы действуют совместно. Даже при исправном подключении канал может работать нестабильно, если скорость выбрана слишком высокой для текущего режима работы скетча или если чтение данных встроено в перегруженный цикл. Поэтому при оценке частоты ошибок важно учитывать сам факт искажения сообщения и условия, при которых оно возникло.
Важная особенность связана с тем, что последовательный порт в Arduino используется для вывода служебной информации и для ввода команд, меню и числовых параметров с компьютера. В такой ситуации даже одиночная ошибка приобретает прикладное значение, поскольку меняет не просто текст на экране, а дальнейшее поведение программы. Именно поэтому при экспериментальной оценке частоты ошибок необходимо считать ошибкой каждое сообщение, принятое с искажением, пропуском символов или неверной интерпретацией введенных данных.
Значимость подобной проверки особенно заметна в тех задачах, где через последовательный канал передаются результаты измерений. В работах по использованию Arduino в физическом эксперименте показано, что плата может регулярно считывать значения с датчика и отправлять их на компьютер по UART. Если при таком обмене часть значений теряется или искажается, ошибка уже затрагивает не отдельный символ, а итоговую картину процесса. По этой причине при экспериментальной оценке частоты ошибок важно учитывать сам факт сбоя и последствия для данных, которые затем будут интерпретироваться как результаты измерения или наблюдения [2].
С аппаратной стороны проверка должна учитывать правильность соединения линии приема и передачи. Для Arduino Uno обмен опирается на выводы RX и TX, а при связке с внешними устройствами неверное подключение или несогласованность уровней дает устойчивую неисправность, а не случайные единичные сбои. В экспериментальном режиме это означает, что до подсчета частоты ошибок необходимо отделить редкие ошибки обмена от грубых аппаратных нарушений, когда канал изначально собран неверно. Иначе полученный результат будет отражать не качество Serial-обмена как такового, а простую ошибку коммутации [3].
На следующем уровне становится важна собственно физика асинхронной передачи. UART использует стартовый и стоповые биты, а корректность приема зависит от совпадения скорости работы приемника и передатчика. В пособии по микроконтроллерам прямо указано, что допустимое расхождение тактовых частот ограничено, а диапазон типовых скоростей включает 9600, 19200, 38400, 57600 и 115200 бит в секунду. Отсюда вытекает ключевой аналитический вывод. При переходе к более высоким скоростям канал становится чувствительнее к временным отклонениям, поэтому частота ошибок должна оцениваться не в одном режиме, а минимум в нескольких скоростных вариантах [4].
Предварительная проверка схемы и логики обмена может проводиться и в среде моделирования. В методическом пособии по разработке умных устройств на базе Arduino подчеркивается, что Tinkercad сочетает симуляцию электрических цепей и базовую эмуляцию функций Arduino. Для экспериментальной оценки ошибок такая среда не заменяет физическую проверку, но помогает заранее исключить часть логических недочетов в коде. За счет этого очная проверка на реальной плате оказывается более показательной, поскольку в ней уже меньше вероятность спутать ошибку обмена с ошибкой самой программы [5].
Отдельное влияние оказывает и программная нагрузка на контроллер. В учебных материалах по Arduino IDE отмечено, что при более высоких скоростях обмена контроллер тратит больше ресурсов на обслуживание последовательного канала, а число прерываний возрастает. Из-за этого основной код может выполняться медленнее, а прием входящего потока становится менее ровным. В экспериментальном плане это означает, что рост частоты ошибок следует связывать со скоростью как числом и с тем, насколько загружен сам скетч. Один и тот же baud rate в простом и перегруженном проекте может давать разный уровень надежности [6].
На программном уровне важнейшим фактором остается способ чтения входящих данных. Материалы по чтению последовательного порта в Arduino показывают, что через Serial канал на плату могут поступать отдельные символы, команды, пункты меню и числовые значения. В таких условиях ошибка проявляется не всегда как полный разрыв связи. Намного чаще она выражается в неверной интерпретации введенной команды, пропуске части строки или чтении неполного значения. Поэтому итоговая экспериментальная оценка должна учитывать три формы сбоя. Искажение символов, выпадение части сообщения и логически неверное распознавание принятой команды. Именно такая трактовка лучше всего отражает реальную частоту ошибок Serial-обмена в проектах на платформе Arduino [7].
2 Экспериментальная оценка частоты ошибок Serial-обмена и анализ факторов, влияющих на их появление
Материалы и методы
Экспериментальная установка
Эксперимент проводился с использованием следующего оборудования и программного обеспечения:
- микроконтроллерная плата Arduino Uno R3 на базе ATmega328P;
- персональный компьютер под управлением операционной системы Windows;
- среда разработки Arduino IDE (версия 1.8.x или выше);
- стандартный USB-кабель для подключения платы к ПК;
- соединительные провода длиной 0,5 м и 5 м;
- источник электромагнитных помех - бытовой фен.
Передача данных осуществлялась по последовательному интерфейсу UART через виртуальный COM-порт, реализованный средствами USB-интерфейса платы Arduino.
Схема подключения
Плата Arduino подключалась к персональному компьютеру через USB-интерфейс.
Для моделирования влияния длины линии и помех использовались соединительные провода различной длины (0,5 м и 5 м), подключённые к выводам RX (0) и TX (1) микроконтроллера. В условиях воздействия помех провод размещался в непосредственной близости от работающего фена.
Программная реализация
На микроконтроллере выполнялся тестовый скетч, осуществляющий периодическую передачу фиксированного набора данных через последовательный порт с заданной скоростью (baud rate), задаваемой функцией:
Serial.begin(baud_rate);
Передаваемые данные представляли собой строку фиксированной длины, содержащую:
- последовательность символов (например, "TEST12345"),
- либо числовые значения, используемые для проверки корректности приёма.
На стороне ПК использовался монитор последовательного порта Arduino IDE для приёма и регистрации данных.
Параметры эксперимента
В ходе эксперимента варьировались следующие параметры:
- скорость передачи данных (9600, 57600, 115200 бод);
- длина соединительной линии (0,5 м и 5 м);
- наличие внешних электромагнитных помех.
Для каждого набора условий выполнялась серия из 5 измерений.
Дополнительно фиксировалось: общее число искажённых сообщений; случаи потери части сообщения; случаи некорректной интерпретации данных.
Сообщение считалось ошибочным, если: хотя бы один символ был искажён; часть сообщения отсутствовала; полученные данные не соответствовали ожидаемому шаблону.
Обработка результатов
Частота ошибок оценивалась по показателю BER (Bit Error Rate), определяемому как отношение числа ошибочно принятых битов к общему числу переданных битов:
BER = Nₑ / N (1)
где: Nₑ - число ошибочных битов; N - общее число переданных битов.
Для каждого режима вычислялось среднее значение BER по результатам пяти измерений, а также среднеквадратичное отклонение σ.
3 Полученные результаты и их обсуждение
Результаты экспериментальной оценки частоты ошибок Serial-обмена при различных условиях передачи данных приведены в таблице 2
Таблица 2.
Оценка частоты ошибок Serial-обмена
|
№ |
Длина линии, м |
Условия передачи |
Скорость, бод |
BER
|
σ (бит/бит) |
Ошибки |
|
1 |
0,5 |
без помех |
115200 |
1.2 х 10-7 |
0.3 х 10--7 |
12 |
|
2 |
0,5 |
без помех |
9600 |
<1 х 10-8 |
- |
0 |
|
3 |
5 |
без помех |
115200 |
4.5 х 10-5 |
1.2 х 10--5 |
450 |
|
4 |
5 |
помехи |
57600 |
8.7 х 10-4 |
2.1 х 10--4 |
8700 |
Анализ полученных данных показывает, что надёжность последовательного обмена существенно зависит от скорости передачи, длины линии связи и наличия внешних помех.
Прежде всего отмечено влияние скорости передачи данных. При использовании скорости 9600 бод на короткой линии (0,5 м) ошибки не зафиксированы, а значение BER оказалось ниже порога измерения (< 1 × 10⁻⁸). При увеличении скорости до 115200 бод в тех же условиях наблюдается появление ошибок (BER ≈ 1.2 × 10⁻⁷), что указывает на рост чувствительности канала к временным рассогласованиям и нагрузке на контроллер.
Существенное влияние оказывает длина линии передачи. При увеличении длины провода с 0,5 м до 5 м на скорости 115200 бод значение BER возрастает на несколько порядков (до 4.5 × 10⁻⁵), а число ошибок увеличивается с единичных значений до сотен. Это свидетельствует о повышении влияния затухания сигнала, наводок и искажений фронтов импульсов при увеличении длины соединения.
Наиболее значительное ухудшение качества связи наблюдается при одновременном увеличении длины линии и воздействии внешних помех. В условиях использования провода длиной 5 м и воздействия электромагнитных помех (нагрев феном) при скорости 57600 бод значение BER достигает 8.7 × 10⁻⁴, а число ошибок возрастает до тысяч. Это указывает на высокую чувствительность UART-интерфейса к внешним электромагнитным воздействиям при недостаточной помехозащищённости линии.
Важно отметить, что в ходе эксперимента ошибки проявлялись не только в виде искажённых символов, но и в форме частичной потери сообщений и некорректной интерпретации данных. Это подтверждает, что при практическом использовании Serial-обмена необходимо учитывать не только битовые ошибки, но и логические нарушения структуры передаваемой информации.
Заключение
Полученные результаты позволяют выделить несколько ключевых закономерностей:
- увеличение скорости передачи данных приводит к росту частоты ошибок даже при стабильных условиях соединения;
- увеличение длины линии существенно ухудшает качество передачи, особенно на высоких скоростях;
- внешние помехи оказывают наиболее сильное влияние, вызывая резкий рост BER;
- влияние факторов носит комбинированный характер: наибольшее количество ошибок наблюдается при одновременном действии нескольких неблагоприятных условий.
Таким образом, экспериментальная оценка показывает, что надёжность Serial-обмена в проектах на платформе Arduino не является фиксированной величиной и определяется совокупностью аппаратных и программных факторов. При проектировании систем необходимо учитывать ограничения по скорости передачи, длине соединений и условиям электромагнитной совместимости.
