Альтернативное позиционирование квадрокоптера в системе связи на динамических объектах
Конференция: XLII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Приборостроение, метрология и информационноизмерительные приборы и системы

XLII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Альтернативное позиционирование квадрокоптера в системе связи на динамических объектах
ALTERNATIVE POSITIONING OF THE QUADCOPTER IN THE COMMUNICATION SYSTEM ON DYNAMIC OBJECTS
Boris Kuzyakov
Candidate of Physical and Mathematical Sciences, Associate Professor, Russian Technological University MIREA, Russia, Moscow
Аннотация. В работе освещаются вопросы альтернативного определения местоположения квадрокоптера в системе связи на динамических объектах. Показаны преимущества этого метода в сравнении с известным методом позиционирования на основе применения теории распознавания образов. Приведены конкретные схемы определения дистанции между динамическими объектами на земной поверхности. Представлена схема определения высоты зависания квадрокоптера с использованием встроенной типовой видеокамеры. Измерения в предложенной схеме сопоставляются с данными системы ГЛОНАСС/GPS. Приведенные методики, особенно привлекательны, при позиционировании квадрокоптера совместно с движущейся автоколонной.
Abstract. The paper covers the issues of alternative determination of the location of the quadcopter in the communication system on dynamic objects. The advantages of this method in comparison with the known positioning method based on the application of the theory of pattern recognition are shown. Specific schemes for determining the distance between dynamic objects on the Earth's surface are given. A scheme for determining the hover height of a quadrocopter using a built-in standard video camera is presented. The measurements in the proposed scheme are compared with the data of the GLONASS/GPS system. These techniques are particularly attractive when positioning a quadrocopter together with a moving convoy.
Ключевые слова: квадрокоптер; позиционирование; динамические объекты; местоположение; земная поверхность; высота зависания; система ГЛОНАСС/GPS; движущаяся автоколонна.
Keywords: quadcopter; positioning; dynamic objects; location; ground surface; hover height; GLONASS/GPS system; moving convoy.
Для определения местоположения квадрокоптера в околоземном пространстве часто применяется метод позиционирования на основе применения теории распознавания образов [1, 2]. Однако алгоритмы весьма не простые и требуется значительное время для работы ПО. При этом, для динамических объектов, это ПО не совсем подходит, так как за время обработки, положение объектов может сильно измениться. В этой связи становятся весьма актуальными альтернативные методы позиционирования.
1. Методы позиционирования на земной поверхности
Методы позиционирования, типа: автомобиль – автомобиль (V2V), основанные на использовании световой коммуникации в видимом диапазоне (VLC), в основном, делятся на две категории: бинокулярное позиционирование [3-6] и монокулярное позиционирование [5, 6]. Бинокулярное позиционирование позволяет достичь более высокой точности при измерении на большие расстояния. Однако вычислительная сложность бинокулярного позиционирования, включающая калибровку и согласование между двумя камерами, затрудняет достижение производительности в реальном времени, что жизненно важно для позиционирования V2V. Поэтому, благодаря низкой стоимости и высокой производительности в реальном времени для позиционирования V2V [5, 8], монокулярное позиционирование является более привлекательным для автомобилей (рисунок 1).
Сигнальное авто Целевое авто

Рисунок 1. Схема монокулярного позиционирования на базе VLC
Обычно метод монокулярного позиционирования используется для измерения расстояния между оцениваемым транспортным средством и целевым транспортным средством через базовую линию. В качестве исходных линий используются тени под автомобилем, номерные знаки и линии разметки полосы движения [6 -7]. Однако из-за отсутствия фиксированной базовой линии и осветительного оборудования неизбежный дрейф шкалы затрудняет получение высокоточного результата позиционирования [8] и нелегко измерить расстояние в темной среде. Кроме того, есть некоторые случайные ошибки. Это сильно ухудшает производительность позиционирования [3]. В эффективном методе монокулярного позиционирования, на основе VLC, для решения вопросов масштабного дрейфа и учета темной среды используется предварительное знание фиксированной длины между задними фонарями целевого транспортного средства в качестве базовой линии. Для повышения точности позиционирования используется фильтр Калмана (KF), который уменьшает влияние дисперсии ошибок при позиционировании. Кроме того, для точности позиционирования, оцениваются воздействия расстояния и различной скорости автомашин. Вариант системы координат в схеме монокулярного позиционирования, приведены на рисунке 2.
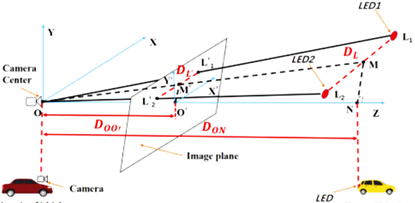
Рисунок 2. Системы координат в схеме монокулярного позиционирования (Camera Center - Центр Камеры; Image plane - плоскость изображения)
Рисунок 2 включает в себя две системы координат, одна из которых является мировой системой координат, а другая - системой координат изображения. Мировая система состоит из осей X, Y и Z, координаты изображения состоят из осей X’ и Y’, центры O и O’ являются их исходными точками, соответственно. L1 и L2 представлены в виде двух задних фонарей светодиодов на целевом транспортном средстве. L '1 и L' 2 - это соответствующие отображения L1 и L2 в координате изображения, соответственно. Расстояние между L1 и L2 обозначается, как DL и расстояние между L'1 и L'2 обозначается в виде DL’. Таким образом, DL и DL’ представлены как расстояние между двумя задними фонарями в мировой системе координат и в системе координат изображения, соответственно. O - это центр камеры, установленной на сигнальном транспортном средстве. При задании DL, фокусное расстояние DOO’ и разрешение датчика изображения получаются с помощью инструкций камеры. Расстояние DL можно вычислить с помощью несложного выражения:
 ,
,
где dx и dy - боковая и вертикальная длина каждого пикселя в датчике изображения, соответственно.
Укрупненная схема обработки изображений приведена на рисунке 3.
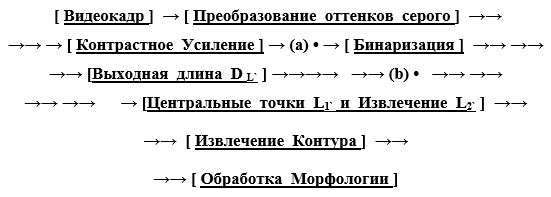
Рисунок 3. Схема обработки изображений
На сигнальном транспортном средстве установлена камера и используется для захвата двух светодиодов на целевом транспортном средстве. Если предположить, что яркость двух светодиодов значительно выше фона на изображении, то после реализации схем преобразования оттенков серого и усиления контраста изображение будет более контрастным. Затем для извлечения светодиодов выбирается глобальное пороговое значение серого цвета. Однако по-прежнему существует шум изображения, и для устранения этих шумов можно использовать комбинацию морфологии «open-operation» и «close-operation». Впоследствии координаты изображения центра двух светодиодов получают путем извлечения контура и извлечения центральной точки.
На рисунке 4 (d) показаны примеры погрешностей позиционирования с KF и без KF в LDP (длинные дистанции), при скорости 21,7 м/с.

Рисунок 4. Примеры погрешностей позиционирования с KF и без KF в LDP; вертикальная ось – погрешногсть позиционирования, м; горизонтальная ось – дистанция между авто, м
В полном тексте цитируемой работы [3], приведены погрешности позиционирования с KF и без KF в LDP, при скоростях: 10,5 м/с, 13,3 м/с, 18,9 м/с и 21,7 м/с. Их анализ показывает, что дисперсия ошибки позиционирования явно увеличивается в LDP, по сравнению со случаем SDP (короткие дистанции). Причина в том, что случайная ошибка будет увеличиваться по мере увеличения расстояния. Для уменьшения случайной погрешности, KF применяется в монокулярной схеме позиционирования на основе VLC. Это указывает на то, что, используя предложенный метод позиционирования на основе VLC с KF, может значительно повысить точность в LDP для позиционирования V2V с различной относительной скоростью.
Материалы приводимой статьи показывают, что предлагаемый метод позиционирования на основе VLC позволяет точно оценить расстояние между приемником и передатчиком как в SDP, так и в LDP. Это связано с фиксированной базовой линией для монокулярного позиционирования, и это может гарантировать эффективность предложенного метода. Кроме того, из-за случайной ошибки в процессе изображения и вибрации мобильной платформы, производительность снижается. При этом, может быть эффективно использован KF для повышения точности предлагаемого метода позиционирования на основе VLC.
2. Качественное определение высоты ГКР
Наряду с уменьшением стоимости системы (∆С), за счёт снижения массы аппаратуры ∆М, возможно снижение ∆С за счет уменьшения объёма технических сервисов. Как известно, современные эффективные коптеры «легкого» и «среднего» класса по грузоподъёмности, содержат аппаратуру определения их местоположения в плоскости и по высоте. Уже достигнуты хорошие точности в определении координат на местности. Повышение точности определения h, облегчает решение задачи наведения и удержания оптической связи между наземными модулями системы связи и модулями, установленными на грузовом коптере. Точность измерений координат коптера с помощью ГЛОНАСС/GPS, зависит от конструкции и класса приёмника, числа и расположения спутников (в реальном времени), состояния ионосферы и атмосферы Земли (сильной облачности и т.д.), наличия помех и других факторов. "Бытовые" ГЛОНАСС/GPS - приборы, для "гражданских" пользователей, имеют, в среднем, реальную точность, при минимальной помехе, ± 5 – 15 метров в плане. Однако, по информации из СМИ, определение высоты объектов – значительно хуже. Если, использовать «коэффициент ухудшения» (Ку ) – 2,5 - 3,5, то даже при малом Ку = 2,5, оценки точности определения высоты h объекта, составляют: 5 – 38 м. Эта оценка соответствует оценкам из других источников информации: ± 10 м – при h = 50 м и ± 50 м, при h = 100 м. В нашей задаче, величина h = 50 - 60 – 80 м. При этом, с учетом реализации оптической системы ретрансляции для решения поставленной задачи, даже нижняя оценка точности определения h (0,1 h), и на пределе, не «подходит». А верхняя оценка (более 0,5 h) – совершенно не приемлема. Средняя величина – 0,25 h - так же малопривлекательна, хотя применяется сложная система спутникового мониторинга.
Возможен некоторый альтернативный метод определения высоты квадрокоптера над Землей h (рисунок 5). Он базируется на том, что сейчас, информация с видеокамеры ГКР, как правило, передается на пульт управления или экран встроенного смартфона оператора.
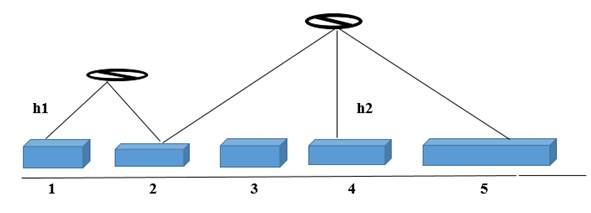
Рисунок 5. Варианты высот зависания квадрокоптера (  ) с зеркальным лазерным отражателем над колонной автомобилей (1 – 5)
) с зеркальным лазерным отражателем над колонной автомобилей (1 – 5)
При высоком качестве передачи, наблюдаемые объекты могут быть визуально хорошо различимы. Был поставлен ряд натурных экспериментов (рисунок 6) по передаче фото легковых авто, снятых с разной высоты h. Визуальное сравнение приведенных фото, показывает, что размеры авто на фото (А) и (в) сильно отличаются, а габаритные размеры авто на рис. (А) и (и), практически совпадают. Причем, точно известно, что высота съёмки фото - (и) составляла 21 м (балкон 7-го этажа 12-ти этажного жилого дома. Высоты съёмки фото – с), в) – 18 м, 15 м, соответственно. При использовании «шлема» в аппаратуре оператора, степень различения объектов ещё более повышается, за счет снижения фоновых помех и повышения контрастности изображений.
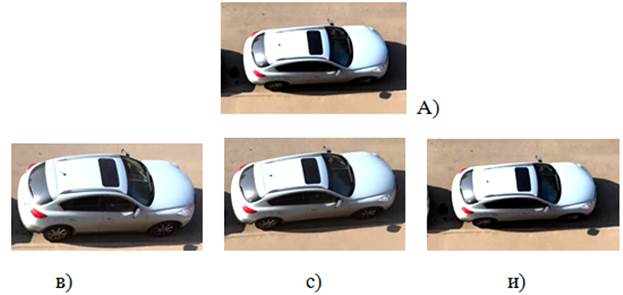
Рисунок 6. Фото авто: А) – наблюдаемый объект; в), с), и) - снятые с помощью бытовой видеокамеры смартфона, с разной высоты, с шагом 3 м.
Можно сказать, что погрешность определения высоты, с помощью приведенных фото - менее 2 - 3 м, и она вполне объективна (с учетом некоторых погрешностей любительской съемки – даже без штатива и без точного позиционирования (выбора ракурса съёмки) объектов. Таким образом, точность определения h ГКР в предложенном методе оказывается почти в 2 раза выше оценки наилучшей точности, при использовании системы ГЛОНАСС/GPS и более чем в 10 раз выше, чем при оценке худшей точности. Это обстоятельство может послужить основой для отказа от сервиса ГЛОНАСС/GPS в ГКР, в позиции определения h объекта, что позволяет снизить стоимость всей системы. В качестве примера, приведена реальная колонна (рисунок 7), в которой необходима лазерная связь и квадрокоптер (рисунок 8).

Рисунок 7 . Колонны военной техники Турции на относительно открытой местности

Рисунок 8. Квадрокоптер в режиме зависания
Таким образом, рассмотрены основные аспекты альтернативного позиционирования квадрокоптера совместно с движущейся автоколонной.
