Использование точного агрегата для стабильности схемы самодействующего управления налаженостью водоснабжения поселка
Журнал: Научный журнал «Студенческий форум» выпуск №19(112)
Рубрика: Сельскохозяйственные науки

Научный журнал «Студенческий форум» выпуск №19(112)
Использование точного агрегата для стабильности схемы самодействующего управления налаженостью водоснабжения поселка
APPLICATION OF THE MATHEMATICAL APPARATUS FOR THE ANALYSIS OF THE STABILITY OF THE AUTOMATIC CONTROL SYSTEM OF THE WATER SUPPLY SYSTEM OF THE VILLAGE
Rustem Sabriyev
Undergraduate, Crimean Engineering and Pedagogical University named after Fevzi Yakubov, Russia, Simferopol
Аннотация. В данной статье произведен расчет и анализ на устойчивость системы автоматизации для водонапорной станции.
Abstract. In this article the calculation and analysis for the stability of the automation system for a water station.
Ключевые слова: уравнение, переменная, коэффициент, характеристика, система.
Keywords: equation, variable, coefficient, characteristic, system.
Составим структурную блок-схему системы автоматического управления для регулирования уровня воды водонапорной башни (рис.1).
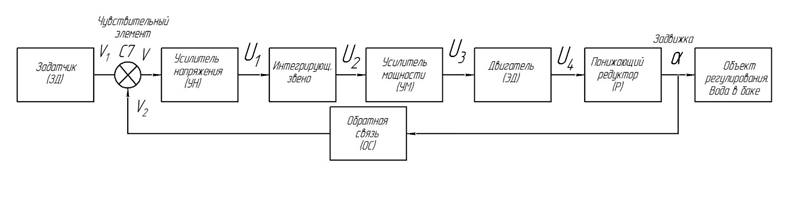
Рисунок 1. Структурная блок-схема управления уровнем воды в баке
Уравнение сравнивающего элемента, характеризующегося значениями ![]() ; выразим в отклонениях через изменение напряжения
; выразим в отклонениях через изменение напряжения ![]() .
.
Передаточная функция усилителя мощности:
![]() ,
,
где ![]() – коэффициент усиления двигателя по напряжения;
– коэффициент усиления двигателя по напряжения;
![]() – постоянная времени усилителя, с; р – постоянная дифференцирования.
– постоянная времени усилителя, с; р – постоянная дифференцирования.
Передаточная функция интегрирующего звена
![]()
где ![]() – коэффициент передачи звена.
– коэффициент передачи звена.
Предположим, что чувствительный (сравнивающий) элемент отсоединен от управляющего объекта и рассмотрим разомкнутую систему автоматического управления.
Управляющее воздействие, которое прикладывается к управляемому объекту определяется выражением
![]()
где ![]() – рассогласование на выходе чувствительного элемента,
– рассогласование на выходе чувствительного элемента,
![]() – передаточная функция управляющего устройства.
– передаточная функция управляющего устройства.
Найдем дифференциальное уравнение системы автоматического управления регулирования уровня воды водонапорной башни.
Согласно (Рис.1):
![]()
Для разомкнутой системы:

Скорость изменения угла поворота задвижки ![]() , откуда
, откуда ![]() , и
, и
Подставляя в уравнении передаточной функции W(p) имеем

где ![]() – постоянная времени интегрирующей цепи.
– постоянная времени интегрирующей цепи.
Равновесие системы регулирования наступит если dp=dq. Угол открытия задвижки ![]() связан с расходом потребляемой жидкости p соотношением
связан с расходом потребляемой жидкости p соотношением ![]() =dp. Тогда, переходя к расходу потребляемой жидкости и расходу поступающей жидкости, имеем следующее выражение:
=dp. Тогда, переходя к расходу потребляемой жидкости и расходу поступающей жидкости, имеем следующее выражение:

В результате получим неоднородное уравнение.
Приравняв правую часть неоднородного уравнения к нулю, получаем однородное уравнение третьего порядка. Решая уравнение однородное, находим корни характеристического уравнения, приняв при этом ![]() .
.
Затем, подставляя правую часть неоднородного уравнения, при необходимых начальных условиях и допущениях, решаем неоднородное уравнение и находим общее решение уравнения:

Решаем это характеристическое уравнение второго порядка и находим корни ![]() и
и ![]() .
.
![]()
![]()
Предварительно: САУ устойчиво, т.к. вещественная часть комплексно сопряженных корней отрицательна. Переходная характеристика является сходящейся, с частотой ![]()
Период колебаний ![]() с декрементом затухания
с декрементом затухания
![]()
Коэффициент затухания ![]() .
.
После этого подставляем начальные условия и решаем неоднородное уравнение.
I. Начальные условия: бак полный; угол ![]() задвижки равен нулю; реакция на звено 6 (задвижка с редуктором) отсутствует.
задвижки равен нулю; реакция на звено 6 (задвижка с редуктором) отсутствует.
II. Второе начальное условие: ![]() – расход максимальный; задвижка открыта; насос работает.
– расход максимальный; задвижка открыта; насос работает.
Расчет коэффициента усиления K САУ проводим для определения его значения, при котором суммарная статическая ошибка Е не будет превышать 2% при изменении задания 0.2t возмущения z=0.5.
Так как кроме коэффициента усиления на величину ошибки влияют значения управляющего и возмущающего воздействий, причем наибольшая величина Е достигается при действии на систему минимального управляющего воздействия ![]() и максимального возмущающего z, то при единичном коэффициенте передачи цепи обратной связи суммарная статическая ошибка может быть найдена как:
и максимального возмущающего z, то при единичном коэффициенте передачи цепи обратной связи суммарная статическая ошибка может быть найдена как:
![]()
где y – выходная переменная, полученная из уравнения замкнутой системы
![]()
![]() – передаточная функция замкнутой системы по задающему воздействию;
– передаточная функция замкнутой системы по задающему воздействию;
![]() – передаточная функция замкнутой системы по возмущающему воздействию.
– передаточная функция замкнутой системы по возмущающему воздействию.
Значение выходной переменной у определяется реакцией САУ (системы автоматического управления) на сумму управляющего и возмущающего воздействий. Поэтому:
![]()
![]()
здесь ![]() – представляют собой суммарные коэффициенты усиления соответственно задающего и возмущающего воздействия и могут быть определены из передаточных функций системы, найденных по совершаемым воздействиям.
– представляют собой суммарные коэффициенты усиления соответственно задающего и возмущающего воздействия и могут быть определены из передаточных функций системы, найденных по совершаемым воздействиям.

Суммарная статическая ошибка:

Построение статических характеристик
Построим внешние статические характеристики для замкнутой САУ в заданном диапазоне. Для этого этого построим график функции
![]()
где ![]()
![]()
![]()
![]()
Берем 2 значения задающего воздействия ![]() из заданного диапазона. Получаем уравнение прямой значения y.
из заданного диапазона. Получаем уравнение прямой значения y.
|
|
z=0 |
z=1 |
|
|
y=0.194 |
y=0.214 |
|
|
y=0.97 |
0.972 |
![]() – при полном баке, заполненном водой в водонапорной башне.
– при полном баке, заполненном водой в водонапорной башне.
Вывод. В результате было определено, что данная система устойчива. Также был проведен графический анализ по критерию Найквиста, который подтвердил результат. Применение данной системы будет предложено для использования в башенной системе водоснабжения г. Джанкой.
