ВОЗМОЖНОСТИ ПРИМЕНЕНИЯ ВОЗДУШНОГО ЛАЗЕРНОГО СКАНИРОВАНИЯ (ЛИДАРНАЯ СЪЁМКА)
Журнал: Научный журнал «Студенческий форум» выпуск №17(196)
Рубрика: Науки о Земле

Научный журнал «Студенческий форум» выпуск №17(196)
ВОЗМОЖНОСТИ ПРИМЕНЕНИЯ ВОЗДУШНОГО ЛАЗЕРНОГО СКАНИРОВАНИЯ (ЛИДАРНАЯ СЪЁМКА)
Введение
В конце 1990-х годов начинается развитие новых методов получения пространственных данных с помощью импульсных лазеров. Одним из таких методов стало воздушное лазерное сканирование (ВЛС).
Технология ВЛС является самым универсальным методом получения пространственных данных о поверхности земли. Широко применяется для получения информации о труднодоступных территориях (болото, густая растительность). Результатом ВЛС является трехмерный массив точек лазерного отражения (ТЛО), который используется для построения цифровой модели рельефа, создания топографических карт крупных масштабов. Для каждой точки известны 3 координаты, интенсивность отраженного сигнала, а также порядок отражения.
Все более востребованной становится съемка с помощью беспилотных летательных аппаратов (БПЛА). При использовании ВЛС с БПЛА можно создать точную цифровую модель рельефа.
Принцип работы ВЛС
Принцип работы ВЛС состоит в излучении и приеме лазерных отражений с помощью лазерного сканера.
Установленный на авиационный носитель (самолет, вертолет) полупроводниковый лазер работает в импульсном режиме и проводит дискретное сканирование поверхности земли и объектов, расположенных на ней, регистрируя направление и время прохождения лазерного луча. Координаты лазерного сканера находятся с помощью высокоточного спутникового приемника, который работает совместно с ИНС. Для определения абсолютных координат каждой точки лазерных отражений в пространстве, необходимо знать углы разворота и относительные смещения между элементами лазерного сканера. Территории покрываются большим количеством ТЛО, т.к. измерительный комплекс меняет направление излучения из стороны в сторону в плоскости, перпендикулярной направлению движения носителя, и принимает сотни тысяч сигналов в секунду.
Число отражений от одного объекта может быть более одного, так как часть энергии импульса отражается от поверхности объекта (крона деревьев, растительность, здания, опоры ЛЭП), а другая – проходит сквозь неё до отражения с поверхностью земли (последний отраженный импульс). Другими словами, один импульс приносит несколько откликов от объекта.
Обработка материалов, полученных с помощью ВЛС
Обработка материалов ВЛС выполнялась по следующей программе:
- восстановление траектории ВЛС по данным ГНСС и инерциальной системы
- построение облака точек с использованием точных данных траектории и измерений лидара
- объединение и уравнивание облаков точек по траекториям
- классификация облаков точек с получением точек рельефа
- построение ЦМР по классифицированным точкам рельефа
Для выполнения работ по воздушному лазерному сканированию было использовано следующее оборудование:
- воздушный лазерный сканер RIEGL miniVUX-SYS с интегрированной инерциальной системой APX – 15 UAV установленный на БПЛА мультикоптере DJI Matrice M600.

Рисунок 1. Воздушный лазерный сканер RIEGL miniVUX-SYS и БПЛА платформа DJI Matrice M600
Наиболее оптимальным вариантом для обработки облака точек является ПО Microstation.TerraSolid с подключаемыми MDL-приложениям TerraScan,TerraModeler,TerraPhoto.
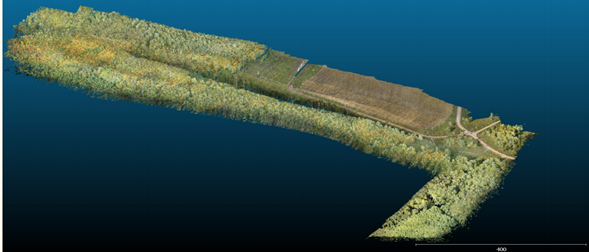
Рисунок 2. Облако точек лазерных отражений
На 1-ом этапе была создана цифровая модель рельефа (ЦМР), выполненная по классифицированным точкам рельефа, полученными по результатам ВЛС. На созданную ЦМР были наложены результаты наземной съемки и отобраны пикеты, попадающие как на залесенные, так и открытые участки. Для выбранных контрольных точек (109 пикетов) вычислены высотные отметки по данным ЦМР ВЛС и определены разности высотных отметок Нвлс — Нсъемка. Для получения объективной оценки точности рассматривались следующие типы поверхности: открытая поверхность (грунт, пашня и т. д.), поверхность с травянистым покрытием и залесенная поверхность. Для оценки плановой точности полученных материалов использовались характерные точки объектов отображенных на облаках точек ВЛС. В качестве контрольных значений использовались координаты этих точек, полученные в результате инструментальной съемки. Для оценки плановой точности использовались отклонения координат, измеренных по материалам ВЛС характерных точек от их значений, полученных в результате инструментальной съемки.
Таблица 1.
Значения
|
Метод/тип поверхности |
Открытая поверхность |
Травянистое покрытие |
Залесенная поверхность |
|
Hвлс - Нсъемка, м |
0,11 |
0,28 |
0,18 |
|
XYвлс - XYсъемка, м |
0,08 (dx) |
0,08 (dy) |
0,11(полное) |
Оценка точности ВЛС
Основным нормативным документом, регламентирующим точность создаваемых топографических материалов, является ГКИНП-02-033-82 «Инструкция по топографической съемке в масштабах 1:5000, 1:2000, 1:1000 и 1:500». В соответствии п. 2.13.1 данного нормативного документа средние погрешности в положении на плане предметов и контуров местности с четкими очертаниями относительно ближайших точек съемочного обоснования не должны превышать 0,5 мм, в масштабе создаваемого плана. В случае масштаба 1:500 указанная средняя погрешность будет составлять 0,25 м.
В соответствии п. 2.14 данного нормативного документа средние погрешности съемки рельефа относительно ближайших точек геодезического обоснования не должны превышать по высоте: 1/4 принятой высоты сечения рельефа при углах наклона до 2°; 1/3 при углах наклона от 2° до 6° для планов масштабов 1:5000, 1:2000 и до 10° для планов масштабов 1:1000 и 1:500; На лесных участках местности эти допуски увеличиваются в 1,5 раза. В случае масштаба 1:500, при высоте сечения 0,5 м. указанная средняя погрешность будет составлять 0,13 м., а на залесенных территориях — 0,19 м. Исходя из вышесказанного и данных таблицы можно сделать вывод о том, что точность высот метода ВЛС соответствует точности масштаба 1:500
