МОДЕЛИРОВАНИЕ ОСНОВНЫХ ПАРАМЕТРОВ АСИНХРОННОГО ДВИГАТЕЛЯ ГРУНТОУПЛОТНЯЮЩЕГО УСТРОЙСТВА
Журнал: Научный журнал «Студенческий форум» выпуск №41(350)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №41(350)
МОДЕЛИРОВАНИЕ ОСНОВНЫХ ПАРАМЕТРОВ АСИНХРОННОГО ДВИГАТЕЛЯ ГРУНТОУПЛОТНЯЮЩЕГО УСТРОЙСТВА
Существует ряд общих требований, которым должны отвечать грунтоуплотняющие машины [1]. Это высокая уплотняющая способность и производительность машины; минимальные металлоемкость и энергоемкость; малогабаритность, маневренность, универсальность и технологичность конструкции; высокая эксплуатационная надежность и др.
В настоящее время во всем мире, в том числе и в России‚ при уплотнении грунтов в траншеях используются практически все существующие способы уплотнения: вибрирование и вибротрамбование, укатка, трамбование. В связи с разнообразием способов уплотнения грунта разнообразно и оборудование для уплотнения грунтов. Наиболее распространены: виброплиты, вибротрамбовки, малогабаритные виброкатки самоходные и с ручным управлением, механические и взрывные трамбовки, сменное навесное грунтоуплотняющее оборудование к гидроэкскаваторам или специализированным машинам.
Проведенный анализ грунтоуплотняющего оборудования показал, что наблюдается тенденция применения позиционного оборудования, обладающего низкой производительностью, а для увеличения производительности необходимо обеспечить непрерывность процесса.
Обеспечить непрерывность уплотнения и высокую производительность при уплотнении дна траншей, способно грунтоуплотняющее устройство шагающего типа [2], представленное на рисунке 1.
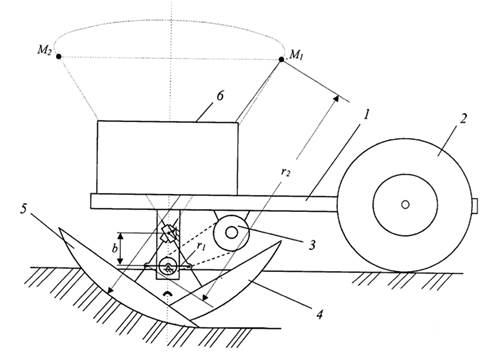
Рисунок 1. Грунтоуплотняющее устройство шагающего типа:
1 – рама; 2 – опорные колеса; 3 – привод; 4-5 – рабочие органы; 6 – груз (вертикальная статическая нагрузка)
Грунтоуплотняющее устройство содержит раму 1 с горизонтальной платформой, опирающейся на опорные колеса 2, привод 3, рабочие органы 4, выполненные в виде двух сегментов, закрепленных на шатунах и установленный на раме 1 груз 5, создающий вертикальную статическую нагрузку.
Анализ парка грунтоуплотняющего оборудования показал, что для привода рабочих органов электродвигатели применяются не очень часто, т.к. работы по уплотнению грунта требуют высокой мощности. Также для процесса уплотнения необходимо создание вертикальной статической нагрузки, а это требует значительного увеличения массы машины или в случае применения сменного навесного оборудованием наличие базовой машины (например, экскаватора) или применения дополнительного оборудования. Из-за этого применение электродвигателей на машинах для уплотнения грунта в траншеях затруднено, а в некоторых случаях невозможно конструктивно. В некоторых рассмотренных устройствах с сегментным рабочим органом есть тенденции применения электродвигателей.
Для рассматриваемого в работе грунтоуплотняющего устройства в качестве привода предложено использовать электропривод с асинхронным двигателем. Для того, чтобы правильно выбрать электропривод, необходимо определить кинематические характеристики грунтоуплотняющего устройства.
В результате определения кинематических характеристик грунтоуплотняющего устройства был построен график уравновешивающего момента (рисунок 2), соответствующего крутящему моменту входного кривошипа.
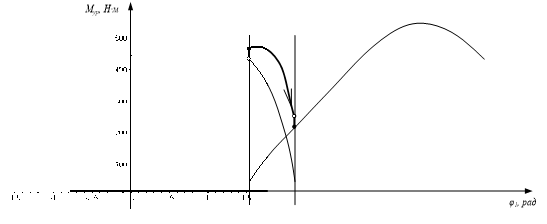
Рисунок 2. График уравновешивающего момента
Из рисунка 2 видно, что максимальный момент Mур, соответствующий крутящему моменту  на входном кривошипе, составляет примерно 540 Н∙м.
на входном кривошипе, составляет примерно 540 Н∙м.
Если рассматривать величину крутящего момента ближе к размерам опытного образца грунтоуплотняющего устройства, то крутящий момент на входном кривошипе будет составлять примерно 7500 Н∙м. Это значение крутящего момента будем использовать при выборе асинхронного электропривода.
Определим требуемую мощность для общей схемы привода (рисунок 3).
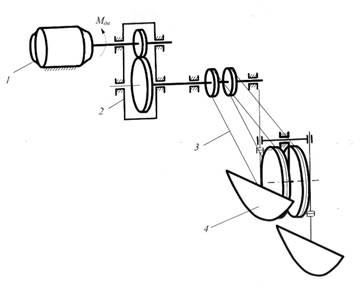
Рисунок 3. Общая схема привода грунтоуплотняющего устройства:
1 – электродвигатель; 2 – редуктор; 3 – ременная передача; 4 – исполнительный механизм

Из справочника [3] выбираем двигатель АИР180М4 с номинальной мощностью Рн =30 кВт.
На основе расчетов параметров асинхронного электропривода была собрана имитационная модель в программной среде Matlab Simulink (рисунок 4).
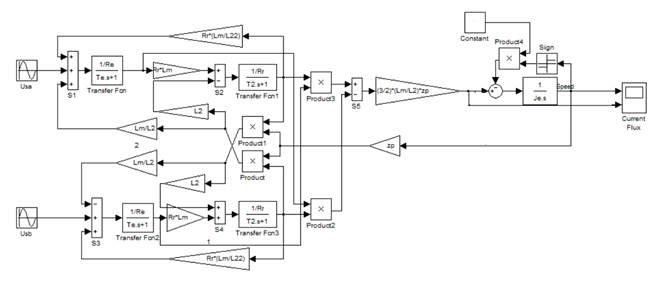
Рисунок 4. Имитационная модель асинхронного электропривода
В результате выполнения получены графики переходных процессов (рисунок 5).
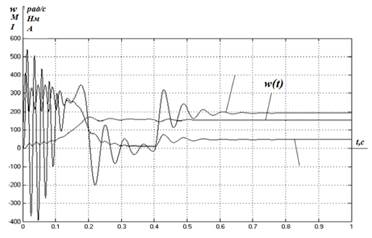
Рисунок 5. Переходные процессы момента, скорости и тока при прямом пуске с набросом нагрузки
Из рисунка 5 видно, что прямой пуск асинхронного двигателя приводит к большим значениям пускового тока и момента, которые негативно сказываются на работе двигателя и исполнительного механизма.
