ЧИСЛЕННЫЙ МНОГОКРИТЕРИАЛЬНЫЙ МЕТОД РЕШЕНИЯ ОБРАТНОЙ ЗАДАЧИ КИНЕМАТИКИ МАНИПУЛЯТОРА С ВНЕШНЕЙ ОСЬЮ
Журнал: Научный журнал «Студенческий форум» выпуск №16(367)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №16(367)
ЧИСЛЕННЫЙ МНОГОКРИТЕРИАЛЬНЫЙ МЕТОД РЕШЕНИЯ ОБРАТНОЙ ЗАДАЧИ КИНЕМАТИКИ МАНИПУЛЯТОРА С ВНЕШНЕЙ ОСЬЮ
Аннотация. В работе приводится численный метод решения обратной задачи кинематики (ОЗК) для 6‑звенного манипулятора, работающего совместно с одноосевым позиционером. Предлагается многокритериальный численный метод решения ОЗК с использованием объединённого вектора обобщённых координат и численно вычисляемого геометрического якобиана размерности ![]() . Функция стоимости включает ошибки положения и ориентации рабочего органа, отклонение от исходной конфигурации, а также штраф за приближение к сингулярностям, основанный на числе обусловленности якобиана.
. Функция стоимости включает ошибки положения и ориентации рабочего органа, отклонение от исходной конфигурации, а также штраф за приближение к сингулярностям, основанный на числе обусловленности якобиана.
Ключевые слова: Обратная задача кинематики, внешняя ось, численные методы, одноосевой позиционер, манипулятор.
Введение. Использование промышленных роботов в задачах сварки, обработки и сборки часто требует расширения рабочей зоны за счёт использования внешних осей, таких как позиционеры или линейные направляющие. В подобных системах манипулятор и внешняя ось образуют единую кинематическую цепь, что приводит к увеличению числа степеней свободы и возникновению избыточности степеней свободы относительно задачи позиционирования рабочего органа. Для таких конфигураций классические аналитические решения обратной задачи кинематики либо отсутствуют, либо становятся чрезвычайно сложными, поэтому широкое применение нашли численные методы [1],[2],[3].
В данной работе рассматривается численный алгоритм решения ОЗК для системы «6‑звенный манипулятор + одноосевой позиционер», реализованный в виде набора функций: прямой кинематики в глобальной и локальной системах координат, вычисления геометрического якобиана по конечным разностям, формирования вектора ошибок и оптимизации функции ошибок одним из существующих методов.
Математическое описание прямой задачи кинематики. Манипулятор описывается стандартными параметрами Денавита–Хартенберга (DH) [4],[5], вместе с матрицей трансформации манипулятора в глобальной системе координат ![]() и типами сочленений. Для каждого звена формируется однородная матрица преобразования
и типами сочленений. Для каждого звена формируется однородная матрица преобразования
где ![]() — соответствующие DH‑параметры звена.
— соответствующие DH‑параметры звена.
Итоговое однородное преобразование от базовой системы координат до рабочего органа в глобальной системе имеет вид
![]()
Внешняя ось моделируется как поворотный стол, обладающий собственной системой координат, жёстко связанной с осью вращения. Преобразование, задаваемое поворотом стола на угол ![]() , описывается матрицей
, описывается матрицей
![]()
где Ext_axis_T задаёт постоянное смещение и ориентацию стола относительно базовой системы робота.
После стандартного перемножения матриц DH‑цепочки получается полное преобразование ![]() от базы до рабочего органа, и конечный результат в локальной системе координат стола вычисляется как
от базы до рабочего органа, и конечный результат в локальной системе координат стола вычисляется как
![]()
Численное вычисление якобиана. Система «манипулятор + внешняя ось» имеет семь обобщённых координат: угол поворота стола ![]() и шесть суставных координат манипулятора
и шесть суставных координат манипулятора ![]() . Для удобства записи вводится объединённый вектор
. Для удобства записи вводится объединённый вектор
Для вычисления якобиана размерности ![]() в выбранной системе координат (глобальной или локальной) используется метод конечных разностей: для каждого обобщённого параметра вводится малое приращение
в выбранной системе координат (глобальной или локальной) используется метод конечных разностей: для каждого обобщённого параметра вводится малое приращение ![]() , вычисляется новое однородное преобразование, и по разности позиций и ориентаций оценивается соответствующий столбец якобиана [6].
, вычисляется новое однородное преобразование, и по разности позиций и ориентаций оценивается соответствующий столбец якобиана [6].
Постановка и решение обратной задачи кинематики. Для решения обратной задачи кинематики численным методом необходимо сформировать функцию для оптимизации. Данной функцией будет выступать вектор ошибок, минимизация которого даст искомые значения обобщенных координат. Вектор объединённых координат записывается как

1) В зависимости от режима вычисляется текущая матрица трансформации рабочего органа ![]() .
.
2) Пусть ![]() и
и ![]() — векторы положений, извлечённые из
— векторы положений, извлечённые из ![]() и
и ![]() . Тогда ошибка по положению представляет собой вектор
. Тогда ошибка по положению представляет собой вектор
![]()
3) Обозначим ![]() и
и ![]() как матрицы вращения соответствующих гомогенных преобразований. Относительное вращение
как матрицы вращения соответствующих гомогенных преобразований. Относительное вращение
![]()
преобразуется в угол ![]() и единичный вектор
и единичный вектор ![]() оси, после чего ошибка ориентации задаётся как
оси, после чего ошибка ориентации задаётся как
![]()
Такое осевое представление обеспечивает минимальное параметрическое описание ошибки ориентации без сингулярностей, связанных с углами Эйлера [5].
4) Вектор отклонения от исходного положения определяется как
![]()
что позволяет штрафовать излишние движения и выбирать решения, близкие к заданной конфигурации.
5) По якобиану ![]() вычисляются сингулярные значения
вычисляются сингулярные значения ![]() [7] и число обусловленности
[7] и число обусловленности ![]() . Вводится индекс управляемости [9]
. Вводится индекс управляемости [9]
![]()
и соответствующий скалярный штраф
![]()
При решении ОЗК в системе координат поворотного стола (обрабатываемой детали) данный штраф позволяет избежать сингулярного положения манипулятора.
6) С учётом вектора весов ![]() итоговый вектор ошибок формируется как
итоговый вектор ошибок формируется как
Результирующий вектор ошибок ![]() подаётся в метод численной оптимизации, например встроенный в MATLAB метод lsqnonlin [10], минимизирующий сумму квадратов его элементов
подаётся в метод численной оптимизации, например встроенный в MATLAB метод lsqnonlin [10], минимизирующий сумму квадратов его элементов ![]() с учётом заданных ограничений. В результате вычисляется вектор
с учётом заданных ограничений. В результате вычисляется вектор ![]() , обеспечивающий минимальное значение
, обеспечивающий минимальное значение ![]() при соблюдении ограничений, а также удовлетворяющий заданным допускам по ошибкам положения и ориентации.
при соблюдении ограничений, а также удовлетворяющий заданным допускам по ошибкам положения и ориентации.
Очевидно, наиболее важными параметрами оптимизации являются ошибки по положению и ориентации инструмента в конечной точке. В окрестностях целевой точки численные значения этих ошибок ![]() достигают 0.0001, в то время как штраф обусловленности по-прежнему принимает значения на отрезке
достигают 0.0001, в то время как штраф обусловленности по-прежнему принимает значения на отрезке![]() , а модуль ошибки отклонения
, а модуль ошибки отклонения ![]() .
.
Таким образом, целесообразно выбирать значения коэффициентов ошибки положения и ориентации на несколько порядков выше коэффициентов отклонения и управляемости. Точное значение коэффициентов подбирается экспериментально, в зависимости от поставленных целей.
Результаты моделирования. На рис. 1 представлена сцена моделирования обработки в среде MATLAB/Simulink.
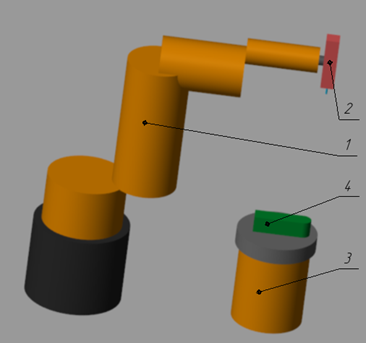
Рисунок 1. Сцена моделирования: 1 — манипулятор с шестью степенями подвижности; 2 — шпиндель с концевой фрезой; 3 — одноосевой позиционер; 4 — обрабатываемая деталь.
В данной модели реализуется обработка детали концевой фрезой совместно с внешней осью, представленной поворотным столом. При этом ключевые точки обработки для генерации траектории задаются в системе координат детали.
Методы генерации траектории, использованные в модели, не описаны в данной статье, но используют описанный численный метод решения ОЗК.
В результате проведения серии экспериментов были подобраны следующие параметры весовых коэффициентов:
![]()
Наиболее важным условием при механической обработке является точность позиционирования. При заданной конфигурации и значениях коэффициентов ошибок точность сгенерированной траектории инструмента в системе координат детали составила 0.004 мм.
При этом, как видно из рис. 2, траектория координаты внешней оси изменяется плавно, без рывков.
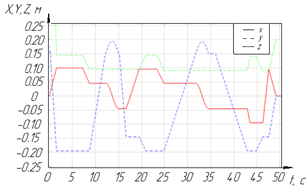
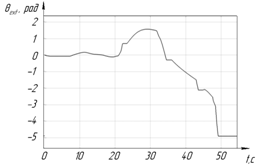
Рисунок 2. Траектории угла поворота одноосевого позиционера и координат X, Y, Z инструмента в системе координат детали
Выводы. В работе представлен численный алгоритм решения обратной задачи кинематики для манипулятора с внешней осью, реализующий многокритериальную оптимизацию в пространстве объединённых координат ![]() . Вектор ошибок включает компоненты по положению, ориентации, отклонению от исходной конфигурации и управляемости, что обеспечивает баланс между точностью, устойчивостью к сингулярным положениям и минимизации перемещений найденного решения. Также стоит отметить, что вектор ошибки легко расширяем – в него можно добавить любые другие необходимые критерии оптимизации.
. Вектор ошибок включает компоненты по положению, ориентации, отклонению от исходной конфигурации и управляемости, что обеспечивает баланс между точностью, устойчивостью к сингулярным положениям и минимизации перемещений найденного решения. Также стоит отметить, что вектор ошибки легко расширяем – в него можно добавить любые другие необходимые критерии оптимизации.
