ДИНАМИЧЕСКОЕ МОДЕЛИРОВАНИЕ МОБИЛЬНОГО МАНИПУЛЯТОРА НА ОСНОВЕ ПРИНЦИПА ГАУССА
Журнал: Научный журнал «Студенческий форум» выпуск №21(372)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №21(372)
ДИНАМИЧЕСКОЕ МОДЕЛИРОВАНИЕ МОБИЛЬНОГО МАНИПУЛЯТОРА НА ОСНОВЕ ПРИНЦИПА ГАУССА
Аннотация. В статье рассматривается задача динамического моделирования мобильного манипулятора, представляющего собой многозвенную механическую систему, состоящую из мобильной платформы и установленного на ней манипулятора. Для описания движения системы используется принцип наименьшего принуждения Гаусса, позволяющий получать уравнения движения с учётом инерционных свойств и кинематических ограничений. На основе введения обобщённых координат сформирована блочная структура матрицы масс системы, отражающая взаимодействие платформы и манипулятора, а также их взаимное влияние при движении. Разработанная математическая модель реализована в среде MATLAB/Simulink, что обеспечивает возможность численного моделирования динамики системы при различных управляющих воздействиях. Проведённый анализ позволяет исследовать изменение обобщённых координат, скоростей и ускорений, а также оценивать влияние движения манипулятора на смещение мобильной платформы и обратное воздействие платформы на динамику манипулятора.
Ключевые слова: мобильный манипулятор, динамическое моделирование, принцип Гаусса, принцип наименьшего принуждения, MATLAB, Simulink, Simscape Multibody, матрица масс, кинематические ограничения, обобщённые координаты.
Динамическое моделирование мобильных манипуляторов позволяет исследовать взаимное влияние мобильной платформы и манипулятора в процессе их совместного движения. При выполнении рабочих операций, например покраска или обслуживание объектов, движение звеньев манипулятора вызывает инерционные реакции, приводящие к смещению основания. В то же время движение платформы оказывает влияние на динамику манипулятора, изменяя его траектории и усилия в звеньях.
Анализ взаимосвязанной динамики также важен для режимов, когда одна из подсистем находится в покое. Например, при выполнении операций загрузки или установки деталей манипулятором на неподвижной или предварительно позиционированной платформе инерционные эффекты звеньев могут вызывать отклонения положения платформы. Таким образом, динамическая модель мобильного манипулятора позволяет определять допустимые параметры движения манипулятора и платформы, при которых вызванные инерционными эффектами смещения не выходят за пределы заданных допусков. Это обеспечивает возможность корректного планирования движений и повышения точности выполнения технологических операций.
Мобильный манипулятор представляет собой сложную механическую систему, состоящую из мобильной платформы и установленного на ней многозвенного манипулятора. Обе подсистемы динамически связаны, что приводит к взаимному влиянию их движения при выполнении рабочих операций.
Для описания конфигурации системы вводится вектор обобщённых координат:
![]()
где ![]() описывает координаты и ориентацию мобильной платформы, а
описывает координаты и ориентацию мобильной платформы, а ![]() — суставные координаты манипулятора.
— суставные координаты манипулятора.
Кинетическая энергия системы записывается как сумма поступательной и вращательной составляющих всех её звеньев и платформы [1]:
где ![]() — линейная скорость центра масс i-го звена,
— линейная скорость центра масс i-го звена, ![]() — его угловая скорость,
— его угловая скорость, ![]() — масса,
— масса, ![]() — тензор инерции.
— тензор инерции.
Скорости выражаются через обобщённые координаты с использованием якобианов [2]:
![]()
где ![]() — линейный якобиан центра масс звена, а
— линейный якобиан центра масс звена, а ![]() — угловой якобиан. Оба якобиана зависят от полной конфигурации системы q, поскольку движение каждого звена определяется положением всех предыдущих звеньев и платформы.
— угловой якобиан. Оба якобиана зависят от полной конфигурации системы q, поскольку движение каждого звена определяется положением всех предыдущих звеньев и платформы.
Подставляя выражения для скоростей в кинетическую энергию, получаем:
![]()
Матрица масс M(q) формируется из якобианов следующим образом [1]:

Таким образом, каждый элемент матрицы масс учитывает вклад линейного и углового движения звеньев, а зависимость якобианов от q отражает взаимное влияние всех звеньев системы.
В силу составной структуры мобильного манипулятора матрица масс имеет блочный вид:
![]()
где диагональные блоки описывают инерционные свойства платформы и манипулятора, а внедиагональные блоки отражают их взаимное динамическое влияние через общие якобианы и кинематическую связанность системы.
Для построения динамической модели мобильного манипулятора используется принцип наименьшего принуждения Гаусса, согласно которому действительное движение механической системы соответствует минимуму функции отклонения действительных ускорений от ускорений, возникающих под действием активных сил при выполнении всех кинематических ограничений.
Функция Гаусса записывается в виде [3]:
![]()
где M(q) — матрица масс системы, а ![]() — ускорения, возникающие под действием только активных сил. Эти ускорения определяются из уравнения:
— ускорения, возникающие под действием только активных сил. Эти ускорения определяются из уравнения: ![]() , где Q — вектор обобщённых активных сил и моментов.
, где Q — вектор обобщённых активных сил и моментов.
Для мобильного манипулятора необходимо учитывать кинематические ограничения, которые могут быть записаны в виде:
![]()
Например, для дифференциальной платформы – отсутствия бокового проскальзывания колёс [4]:
![]()
После дифференцирования по времени получаем ограничение на ускорения:
![]()
Минимизация функции Гаусса осуществляется методом множителей Лагранжа. Формируется расширенная функция [3]:
![]()
Для нахождения минимума необходимо приравнять к нулю производные функции Z по ![]() и
и ![]() :
:

![]()
![]()
![]()
Таким образом получается система, где ![]() учитывает кориолисовы и центробежные силы,
учитывает кориолисовы и центробежные силы, ![]() — силы тяжести,
— силы тяжести, ![]() — вектор управляющих моментов, а
— вектор управляющих моментов, а ![]() — множители Лагранжа, соответствующие реакциям кинематических связей:
— множители Лагранжа, соответствующие реакциям кинематических связей:

Или в матричной форме:

В рассматриваемой работе решается обратная задача динамики, в которой известны требуемые ускорения системы ![]() , а неизвестными являются управляющие моменты и реакции связей.
, а неизвестными являются управляющие моменты и реакции связей.
Преобразуя уравнение движения и подставляя его в уравнение кинематических ограничений, получаем систему линейных алгебраических уравнений относительно ![]() и
и ![]() :
:

Полученная система позволяет определить управляющие моменты, обеспечивающие требуемое движение мобильного манипулятора с учётом инерционных свойств системы, сил тяжести, кориолисовых сил и кинематических ограничений. Рассчитанные управляющие моменты используются в модели MATLAB/Simulink для исследования динамического поведения мобильного манипулятора при различных режимах движения.
Разработанная математическая модель мобильного манипулятора была реализована в среде MATLAB/Simulink с использованием библиотеки Simscape Multibody, предназначенной для моделирования многозвенных механических систем. На рисунке 1 представлена структурная схема разработанной модели.
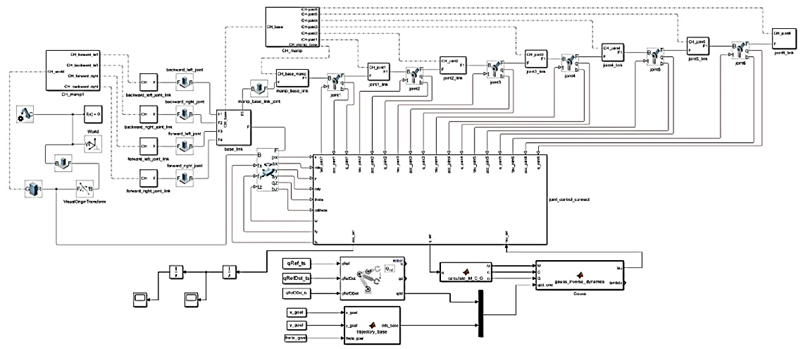
Рисунок 1. Структурная схема динамической модели мобильного манипулятора
Входными данными модели являются требуемые координаты, скорости и ускорения обобщённых координат системы (![]() ) (рисунок 2), определяемые алгоритмом управления или заданной траекторией движения [5].
) (рисунок 2), определяемые алгоритмом управления или заданной траекторией движения [5].
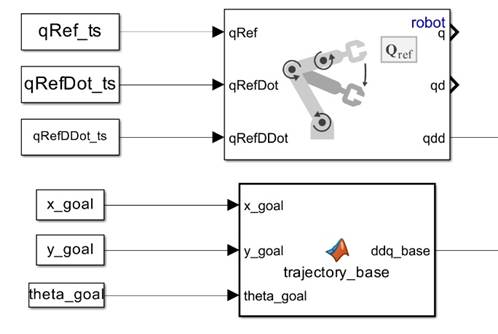
Рисунок 2. Блоки расчета траекторий манипулятора и мобильной платформы
На основе текущего состояния системы вычисляются матрица масс (![]() ), матрица кинематических ограничений (
), матрица кинематических ограничений (![]() ), а также кориолисовы силы и силы тяжести (рисунок 3).
), а также кориолисовы силы и силы тяжести (рисунок 3).
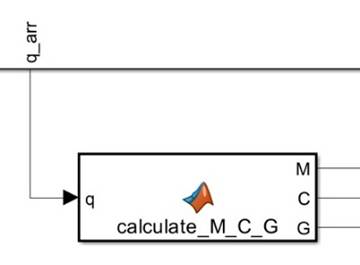
Рисунок 3. Блок расчета матриц масс, кинематических ограничений, кориолисовых сил и сил тяжести
В соответствии с полученным в предыдущем разделе уравнением обратной динамики производится вычисление управляющих моментов (![]() ) и множителей Лагранжа
) и множителей Лагранжа ![]() (рисунок 4).
(рисунок 4).
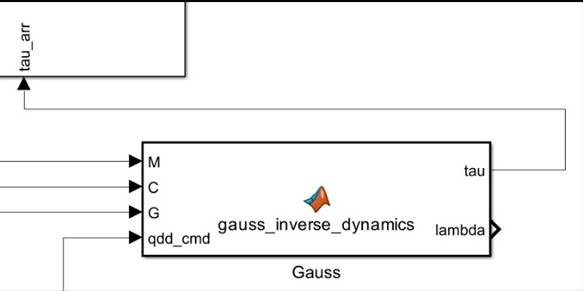
Рисунок 4. Блок вычислений требуемых моментов, с помощью метода Гаусса
Полученные управляющие моменты подаются на блоки Revolute Joint библиотеки Simscape Multibody (рисунок 5, 6), моделирующие динамику шарнирных соединений манипулятора. Внутри данных блоков автоматически учитываются инерционные свойства звеньев, силы тяжести, кориолисовы и центробежные силы, а также взаимодействие между звеньями механической системы [6].
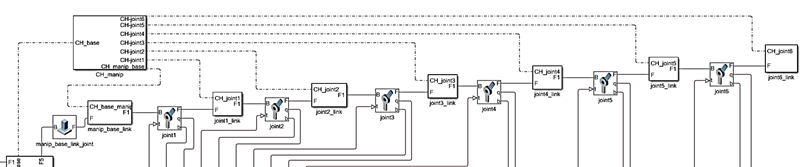
Рисунок 5. Блок звеньев манипулятора
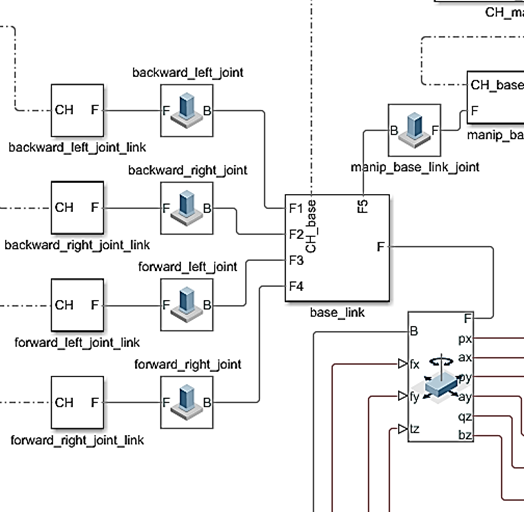
Рисунок 6. Блок звеньев мобильной платформы
В результате моделирования вычисляются фактические ускорения, скорости и положения всех обобщённых координат мобильного манипулятора, которые используются для анализа динамического поведения системы и оценки взаимного влияния движения мобильной платформы и манипулятора. Разработанная модель позволяет выполнять численное моделирование движения мобильного манипулятора при различных режимах управления и исследовать влияние динамических эффектов на точность позиционирования и устойчивость движения системы.
Для проверки работоспособности разработанной динамической модели было проведено численное моделирование движения мобильного манипулятора в среде MATLAB Simulink. В ходе моделирования исследовалось взаимное динамическое влияние мобильной платформы и манипулятора при различных режимах движения.
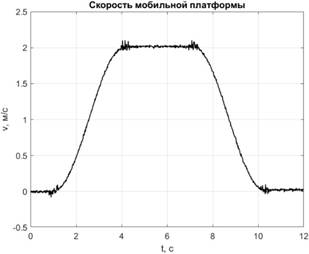
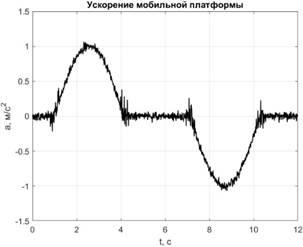
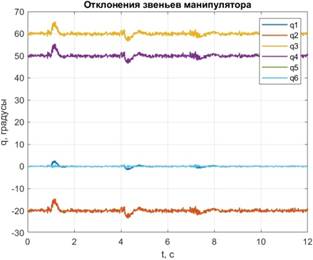
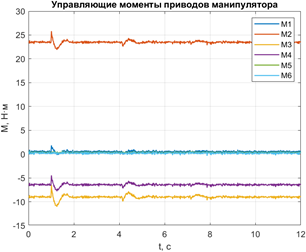
В первом эксперименте анализировалось влияние разгона и торможения мобильной платформы на положение звеньев манипулятора. На платформу задавался закон движения с участками разгона, равномерного движения и торможения, после чего анализировались изменения обобщённых координат и управляющих моментов в суставах манипулятора.
а) б)
в) г)
Рисунок 7. Результаты моделирования динамической модели мобильного манипулятора при разгоне-торможении мобильной платформы: а – Скорость мобильной платформы, б – Ускорение мобильной платформы, в – Положения звеньев манипулятора, г – Управляющие моменты в звеньях манипулятора
Результаты моделирования (рисунок 7) показали, что инерционные силы, возникающие при изменении скорости мобильной платформы, вызывают отклонения звеньев манипулятора от положения равновесия и приводят к изменению управляющих моментов в его суставах. После окончания переходного процесса система возвращается в устойчивое состояние, что подтверждает корректность разработанной динамической модели.
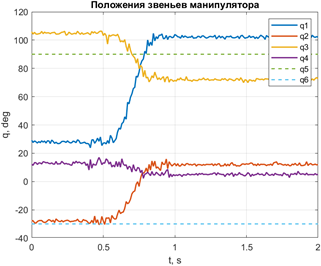
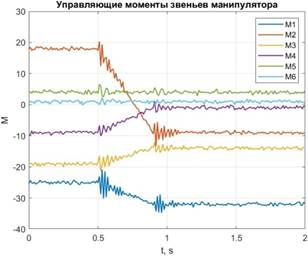
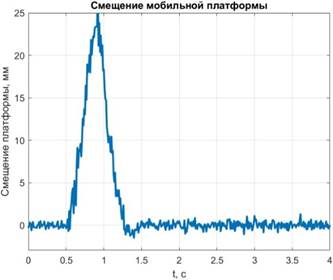
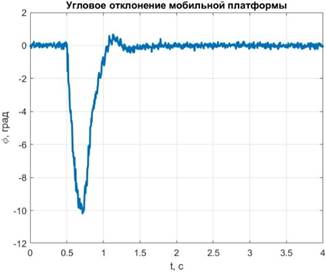
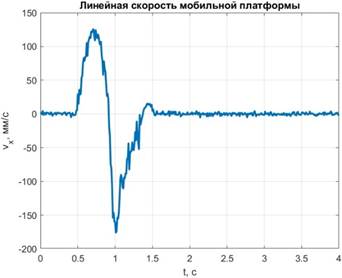
Во втором эксперименте исследовалось влияние движения манипулятора на мобильную платформу. Манипулятор выполнял перемещение рабочего органа по заданной траектории с различными значениями скорости и ускорения, а в процессе моделирования оценивались возникающие линейные и угловые смещения платформы.
а) б)
в) г)
д) е)
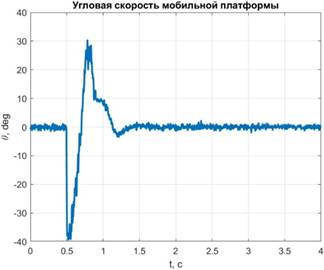
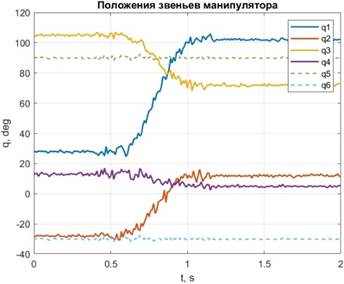
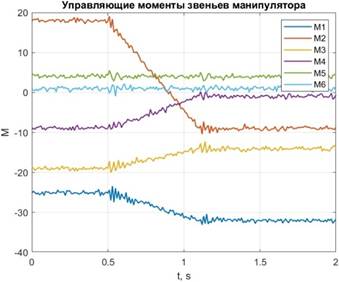
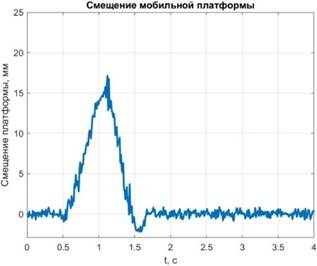
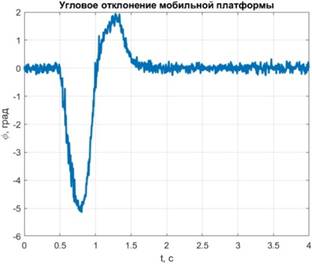
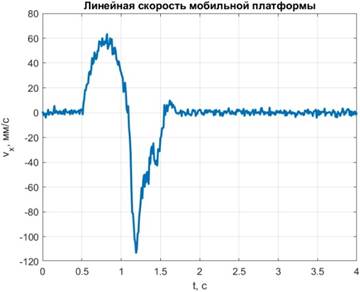
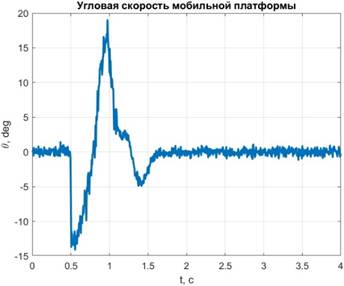
Рисунок 8. Результаты моделирования динамической модели мобильного манипулятора при предельной скорости манипулятора ![]() и ускорении
и ускорении ![]() : а – график положений звеньев манипулятора, б – график управляющих моментов звеньев манипулятора, в – график смещения мобильной платформы по координате Х, г – график поворота мобильной платформы, д – график скорости мобильной платформы по координате Х, е – график угловой скорости мобильной платформы
: а – график положений звеньев манипулятора, б – график управляющих моментов звеньев манипулятора, в – график смещения мобильной платформы по координате Х, г – график поворота мобильной платформы, д – график скорости мобильной платформы по координате Х, е – график угловой скорости мобильной платформы
а) б)
в) г)
д) е)
Рисунок 9. Результаты моделирования динамической модели мобильного манипулятора при предельной скорости манипулятора ![]() и ускорении
и ускорении ![]() : а – график положений звеньев манипулятора, б – график управляющих моментов звеньев манипулятора, в – график смещения мобильной платформы по координате Х, г – график поворота мобильной платформы, д – график скорости мобильной платформы по координате Х, е – график угловой скорости мобильной платформы
: а – график положений звеньев манипулятора, б – график управляющих моментов звеньев манипулятора, в – график смещения мобильной платформы по координате Х, г – график поворота мобильной платформы, д – график скорости мобильной платформы по координате Х, е – график угловой скорости мобильной платформы
Полученные результаты (рисунок 8, 9) показали, что увеличение скорости и ускорения движения манипулятора приводит к росту инерционных воздействий на мобильную платформу и увеличению её линейных и угловых отклонений. При превышении определённых значений скорости движения рабочего органа возникающие смещения платформы могут превышать допустимые пределы точности позиционирования.
Проведённое моделирование позволяет определить допустимые параметры движения манипулятора, обеспечивающие сохранение требуемой точности позиционирования мобильной платформы, а также оценить взаимное влияние движения обеих подсистем мобильного манипулятора. Разработанная динамическая модель может использоваться при выборе режимов движения робототехнического комплекса и анализе его динамического поведения при выполнении технологических операций.
