Системы управления, используемые для управления буровой лебедкой.
Журнал: Научный журнал «Студенческий форум» выпуск №21(72)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №21(72)
Системы управления, используемые для управления буровой лебедкой.
Процесс построения скважины вращательным методом состоит из повторяющихся циклических операций: спуска колонны бурильных труб (инструмента) в скважину, разрушения породы на забое вращательным методом – бурение, наращивание инструмента по мере углубления скважины, подъема инструмента, для последующей замены изношенного долота и иных операций при сооружении скважины. Для выполнения всех этих операций используют буровые установки, представляющие собой сложный комплекс производственных механизмов, в состав которой входит и буровая лебедка, выполняющая одну из основных функций при построении скважины. Требования к электроприводу буровой лебедки следующие:
- спуско-подъемные операции (СПО) должны выполняться за минимальное время и с наименьшими потерями энергии ;
- двигатель должен развивать такой момент и иметь такую мощность, чтобы их было достаточно для преодоления сил трения и подъема полного веса инструмента при работе на низшей передаче редуктора;
- двигатель должен выдерживать частые включения и остановки;
- двигатель должен обладать высоким пусковым моментом и высокой перегрузочной способностью (γ=2,5..2,8 для асинхронных электродвигателей);
- электропривод БЛ должен обеспечивать многоступенчатое регулирование скорости вращения;
В настоящее время применяются различные системы управления приводом буровой лебедки, а именно:
- на основе асинхронного электродвигателя с фазным ротором;
- на основе дизельных двигателей внутреннего сгорания;
- на основе двигателя постоянного тока;
- на основе асинхронного электродвигателя с короткозамкнутый ротором (частотное регулирование).
Система управления на основе асинхронного электродвигателя с фазным ротором используется на буровой установке Уралмаш БУ-75, 4Э-76. Способ регулирования вращения – реостатный. В цепь ротора электродвигателя включены пусковые сопротивления (реостаты).
Структурная схема электропривода на базе асинхронного электродвигателя с фазным ротором, используемая на буровой установке 4Э-76, приведена на рисунке 1. Силовая часть буровой лебедки выполнена на электродвигателе СДБО-6000-710 компании «РусЭлПром». В данной схеме для уменьшения количества ступеней сопротивления, использован активно-индуктивный контур (R4-L). На рисунке 1 изображен асинхронный электродвигатель (АД), блок пусковых реостатов (ПР), редуктор (Р), буровая лебедка (БЛ), электропневматический тормоз (ЭТ) и пусковая аппаратура (QS, Q1, Q2). Для успешного разгона привода БЛ необходимо, чтобы электромагнитный момент, развиваемый электродвигателем, был больше статического момента нагрузки на величину, обеспечивающую оптимальное время разгона, для выполнения условия 1. Для обеспечения высокого пускового момента в цепь ротора включены реостаты. На рисунке 2 приведены механические характеристики асинхронного электродвигателя с фазным ротором. В процессе пуска последовательно выводятся ступени пусковых реостатов и привод выходит на рабочую точку (на рисунке 2 точка з), где электромагнитный момент двигателя становится равным статическому моменту нагрузки и далее начинается подъем бурого инструмента с установившейся скоростью.
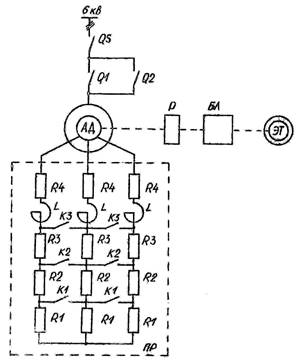
Рисунок 1. Структурная схема электропривода «асинхронный электродвигатель с фазным ротором»
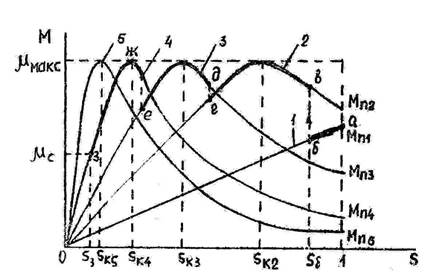
Рисунок 2. Механические характеристики АД с фазным ротором
Достоинства данной системы:
- простота конструкции и обслуживания;
- высокая надежность;
- невысокая стоимость;
- высокий пусковой момент, низкие пусковые токи.
Недостатки:
- низкий КПД, большие потери электроэнергии при пуске и последующем регулировании на реостатах;
- большие габариты двигателя;
- небольшой диапазон регулирования.
Привод, обеспечивающий работу буровой лебедки через механическую трансмиссию от двигателей внутреннего сгорания, работающие по дизельному циклу, называются дизельными. Дизельные привода используются на буровых установках 3200/200ДГУ, 5000/320ДГУ и 6500/400ДГ. Дизельные двигателя передают мощность лебедке посредством клиноременных передач или роликовых цепей. Для работы устанавливаются несколько силовых агрегатов, для повышения мощности.
Достоинства дизельных приводов БЛ:
- автономное энергоснабжение буровой установки, т.к. необходимая для работы механическая энергия вырабатывается дизельными двигателями;
- возможность ведения работы в удалённых и необжитых районах, где отсутствует централизованное электроснабжение.
Недостатки:
- невысокий КПД из-за сложной трансмиссии, в которой происходит потеря мощности;
- сложный в обслуживании;
- дорогая стоимость;
- невысокая эксплуатационная надежность по сравнению с электроприводами.
Система управления на основе двигателя постоянного тока «Тиристорный преобразователь – двигатель постоянного тока (ТП-Д)». Современная типовая схема представлена на рисунке 3.
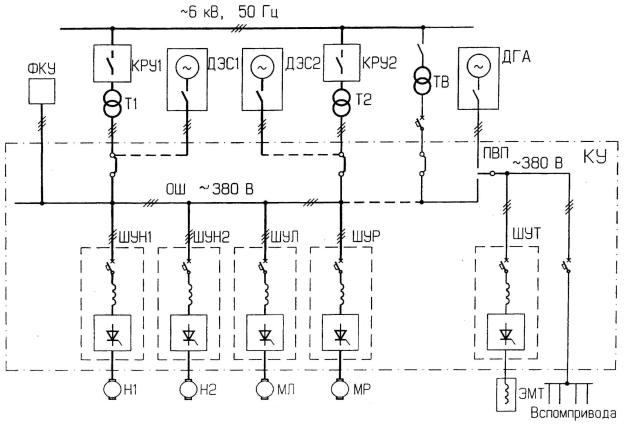
Рисунок 3. Типовая схема электропривода буровой установки Уралмаш БУ3900/225 ДЭП-БМ
Питание всех тиристорных преобразователей обеспечивается от общей шины переменного тока и используются трехфазные «шестиимпульсные» схемы.
Системы ТП-Д ввиду эксплуатации в тяжелых условиях выполняются в контейнерном исполнении (комплектно-тиристорное устройство - КТУ). В результате с 1995 года большинство буровых установок выполнялись по системе ТП-Д. На большинстве действующих отечественных установок применяется напряжение общих шин 380В, на более мощных 660В. От тех же шин питаются вспомогательные потребители через согласующие трансформаторы.
Для управления приводом буровой лебедки используются аналоговые системы управления, а также более современные цифровые (микропроцессорные) системы. В обоих случаях регулирование построено на принципах системы подчиненного регулирования параметров. На буровой установке Уралмаш БУ3900/225 ДЭП-БМ используется привод постоянного тока фирмы Siemens «Simoreg DC-Master».
Достоинства системы ТП-Д:
- высокое быстродействие преобразователя;
- незначительная мощность управления;
- большой срок службы;
- простота осуществления резервирования и взаимозаменяемость блоков.
Недостатки:
- пониженный средний коэффициент мощности;
- значительное искажение кривой тока, потребляемого преобразователем из сети, но это компенсируется установкой фильтрокомпенсирующих устройств (ФКУ);
- более сложная конструкция двигателя постоянного тока в сравнении с асинхронным электродвигателем.
Система управления буровой лебедкой установки Уралмаш 6500/450 БМЧ выполнена по системе преобразователь частоты – асинхронный двигатель (ПЧ-АД). На рисунке 4 представлена структурная схема управления электроприводом лебедки. Силовая часть электропривода буровой лебедки выполнена на инверторных модулях фирмы ABB ACS800-107-1740-7 с общим выпрямителем фирмы ABB ACS800-507-3630-7.
Для управления приводом буровой лебедки используются микропроцессорные системы, в которых реализована векторная система управления прямого управления моментом (DTC) и скалярное управление. Задачей прямого управления моментом является обеспечение моментальной реакции электромагнитного момента электродвигателя на управляющее воздействие.
Достоинства системы ПЧ-АД:
- асинхронный электродвигатель с короткозамкнутым ротором, по сравнению с двигателем постоянного тока, имеет более простую конструкцию и не требует сложного обслуживания;
- возможность рекуперации энергии в сеть при тормозных режимах работы;
- большой диапазон и высокая точность регулирования скорости;
- простота осуществления резервирования и взаимозаменяемость блоков;
- экономия электроэнергии в случае переменной нагрузки;
- большой пусковой момент.
Недостатки:
- отрицательное влияние на сеть;
- источник помех;
- высокая стоимость.
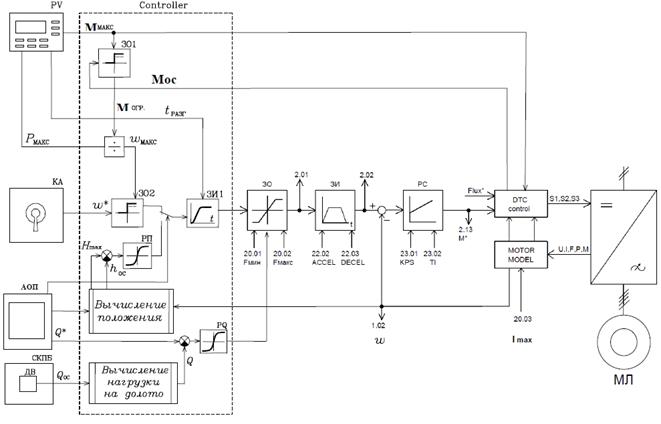
Рисунок 4. Структурная схема управления электроприводом буровой лебедки буровой установки Уралмаш 6500/450 БМЧ
Из всех рассмотренных выше электроприводов самым эффективным и наиболее востребованным в настоящее время является электропривод «ПЧ-АД». На сегодняшний день большое количество эксплуатируемых буровых установок оснащены устаревшими системами управления такими, как реостатные. Для оптимизации технологического процесса и экономии электроэнергии необходимо постепенно уходить от морально устаревших систем управления (реостатных и тд.) и внедрять более современные системы, а именно «преобразователь частоты – асинхронный электродвигатель с короткозамкнутым ротором».
