Имитационная модель ленточного конвейера
Журнал: Научный журнал «Студенческий форум» выпуск №21(72)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №21(72)
Имитационная модель ленточного конвейера
Ленточный конвейер – транспортирующее устройство непрерывного действия с объединённым грузонесущим и тяговым органом в виде замкнутой (бесконечной) гибкой ленты. Движение ленты осуществляется по жестко закрепленным роликовым опорам при этом груз, лежащий на ленте, находится в неподвижном состоянии. Основными достоинствами ленточного конвейера являются: простота конструкции, низкая энергетическая затратность, высокая надежность высокая производительность и скорость перемещения грузов. Благодаря этому, ленточные конвейеры приобрели широкое применение в различных областях промышленности – химической, горнодобывающей, пищевой, в сельском хозяйстве и многих других. С помощью ленточного конвейера можно перемещать грузы различного типа на любые расстояния и под различными углами наклона.
Несмотря на простоту конструкции в ленточных конвейерах существуют следующие проблемы [1]:
1) особенности пуска длинных конвейеров;
2) сход ленты в сторону;
3) пробуксовка ленты;
4) износ ленты;
5) заклинивание ленты.
При обучении студентов электротехнических направлений на практических занятиях по исследованию электропривода, системы автоматики, удобно использовать компьютерную (имитационную) модель, на которой можно оперативно изменить технические параметры и получить те или иные статические и динамические характеристики.
В данной статье рассматривается имитационная модель ленточного конвейера в системе MATLAB, построенная на основе метода конечных элементов. Вся длина ленты разбивается на равные участки для которых рассчитываются силы сопротивления.
Приводная станция устанавливается в конце рабочего участка. Это позволяет разгрузить последующую холостую ветвь конвейера от больших натяжений рабочего участка. Соответственно, натяжная станция устанавливается в противоположном конце. В конвейере присутствуют несколько рабочих участков такие как, прямолинейные (наклонные) и изгиб.
Силы сопротивления движению на прямолинейных участках [2]:
![]() , H, (1)
, H, (1)
где ![]() – ускорение свободного падения;
– ускорение свободного падения;
![]() – масса участка конвейера (уравнение 2, 3);
– масса участка конвейера (уравнение 2, 3);
![]() – результирующий коэффициент сопротивления движению;
– результирующий коэффициент сопротивления движению;
![]() – угол наклона к горизонту участка.
– угол наклона к горизонту участка.
Силы сопротивления движению на участках изгиба:
![]() , H, (2)
, H, (2)
где ![]() – коэффициент сопротивления от изгиба тягового элемента;
– коэффициент сопротивления от изгиба тягового элемента;
![]() – набегающая точка на участке изгиба;
– набегающая точка на участке изгиба;
![]() – сила на участке изгиба;
– сила на участке изгиба;
![]() – коэффициент трения в подшипниках;
– коэффициент трения в подшипниках;
![]() – диаметр вала барабана;
– диаметр вала барабана;
![]() – диаметр барабана.
– диаметр барабана.
Расчетное результирующее усилие на прямолинейных участках трассы:
![]() , H. (3)
, H. (3)
Масса 1 м транспортируемого груза в соотношении с заданной производительностью:
![]() , кг/м, (4)
, кг/м, (4)
где ![]() – производимость.
– производимость.
Массы участков конвейера:
![]() , кг; (5)
, кг; (5)
![]() , кг. (6)
, кг. (6)
По уравнениям 1 – 6 была разработана имитационная модель элемента одного прямолинейного участка (рисунок 1). 1 –моделирование статических режимов были использованы (реализованы) уравнения 5, 6. 2 – моделирование динамических режимов, использовали расчетную суммарную массу и умножали на ускорение![]() . 3 – «Fcn» – блок общего выражения, в котором было реализовано уравнение 1.
. 3 – «Fcn» – блок общего выражения, в котором было реализовано уравнение 1.
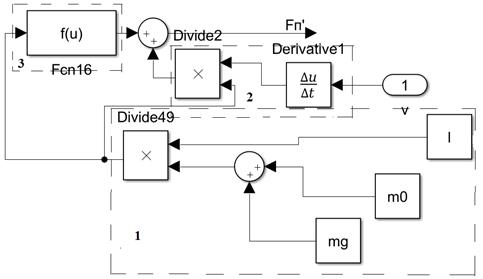
Рисунок 1. Реализация уравнений в программном пакете Matlab/Simulink
Построим модель ленточный конвейер, состоящих из 6 прямолинейных участков и 6 участков изгиба (рисунке 2). Лента конвейера была разбита на 24 равных участка, т.е. 12 в верхнем участке с грузом и 12 в нижнем. Силы сопротивления для каждого участка рассчитываются по структурной схеме, аналогичной рисунку 1.
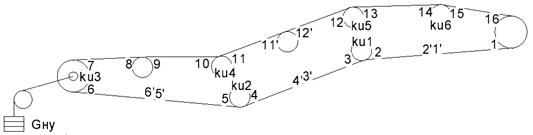
Рисунок 2. Модель ленточного конвейера
На рисунке 3 представлена общая схема модели ленточного конвейера. В модели ленточного конвейера используются 6 коэффициентов изгиба (Ku1-Ku6) согласно уравнению 3.
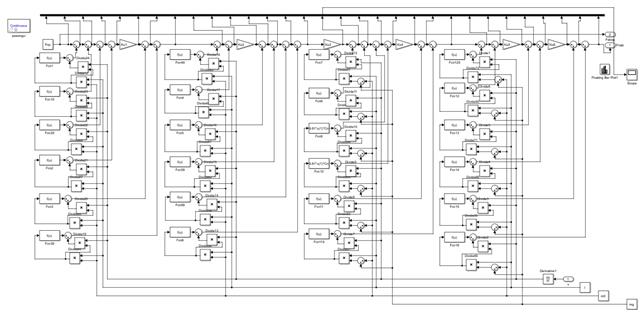
Рисунок 3. Общая схема модели конвейера в программном пакете Matlab/Simulink
Модель электропривода ленточного конвейера представлена на рисунке 4. Асинхронный двигатель «AD 0,12 Kw» питается от трехфазного источника напряжения «Three-Phase Source». Скорость вращения двигателя через коэффициент приведения «Кприв2» подается на вход модели конвейера «Subsystem». Модель рассчитывает силу набегающей и сбегающей точки приводного барабана. Разница сил через коэффициент приведения «Кприв1» приводим к валу двигателя и подаем в качестве нагрузки на двигатели:
 ; (6)
; (6)
 , м/с. (7)
, м/с. (7)

Рисунок 4.Имитационная модель ленточного конвейера
Технические данные моделирования: производительность конвейера ![]() скорость
скорость ![]() масса одного метра ленты
масса одного метра ленты ![]() углы обхвата приводного барабана
углы обхвата приводного барабана ![]() и натяжного барабана
и натяжного барабана ![]() длины и углы наклона к горизонту участку
длины и углы наклона к горизонту участку ![]() м;
м; ![]() ;
; ![]() рад;
рад; ![]() рад;
рад; ![]() рад;
рад; ![]() рад; допустимое ускорение
рад; допустимое ускорение ![]() м/с2.
м/с2.
Принимаем значение коэффициентов трения и сопротивления движению [2]: ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
Параметры двигателя: номинальная мощность ![]() кВт, частота
кВт, частота ![]() Гц, номинальное напряжение
Гц, номинальное напряжение ![]() В, номинальный ток
В, номинальный ток ![]() А и номинальная частота вращения
А и номинальная частота вращения ![]() об/мин.
об/мин.
На рисунках 5 и 6 представлены ступенчатые графики эпюр натяжений ленточного конвейера с грузом и без груза при установившейся скорости. На рисунке 7 представлена эпюра в момент разгона.
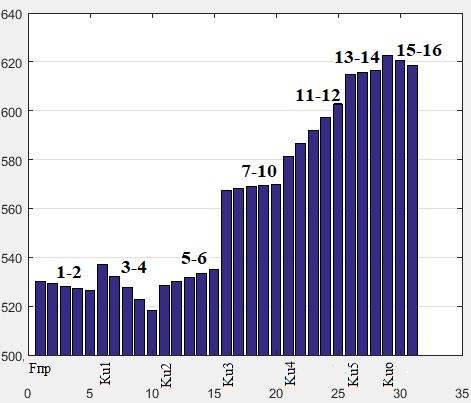
Рисунок 5. Ступенчатый график эпюры натяжения ленты без груза
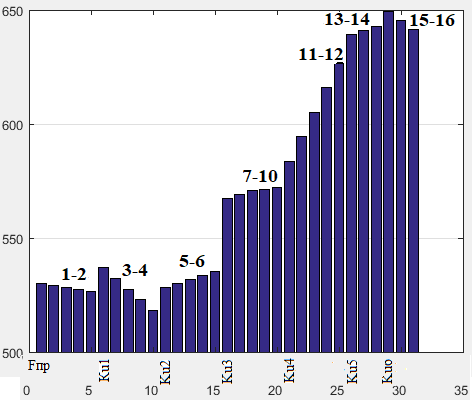
Рисунок 6. Ступенчатый график эпюры натяжения ленты с грузом
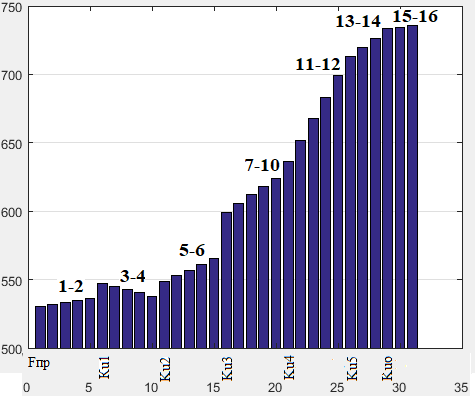
Рисунок 7.Ступенчатый график эпюры при разгоне
На 1 – 2 участке видно увеличение нагрузки, 3 – 4 нагрузка падает из-за наклона. Самые большие нагрузки 7 – 16 происходят на подъеме конвейера. Когда с грузом 7 – 16 нагрузка становится еще больше.
