Разработка модели экстренного торможения автомобиля
Журнал: Научный журнал «Студенческий форум» выпуск №2(95)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №2(95)
Разработка модели экстренного торможения автомобиля
DEVELOPMENT OF MODEL EMERGENCY BRAKING OF A CAR
Guzel Khairutdinova
Master, Naberezhnye Chelny Institute (branch) Federal State Autonomous Educational Institution of Higher Education K (P) FU, Russia, Naberezhnye Chelny
Аннотация. В статье предложен алгоритм работы системы экстренного торможения грузового автомобиля при резком торможении впереди идущего транспортного средства и предоставлены результаты исследования реализованной цифровой модели этой системы.
Abstract. The article proposes an algorithm of the emergency braking system during abrupt braking of ahead vehicle and provides the results of research of the implemented digital model of this system.
Ключевые слова: торможение автомобиля, обработка изображения, обнаружение препятствий.
Keywords: car braking, image processing, obstacle detection.
Предложенный алгоритм работы системы экстренного торможения включает в себя следующие действия:
1. Выделение кадра из видео, поступающего с видеорегистратора;
2. Поиск объекта (препятствия) на кадре;
3. Выяснение направления движения объекта (приближается/отдаляется);
4. Если приближается, то с лидара считывается расстояние до объекта, иначе п. 1;
5. Нахождение разности между расстоянием до объекта и тормозным путем автомобиля;
6. Если разность не превышает порогового значения (было установлено экспертом и оно не могло превышать значения 10 м), то автомобиль тормозит, иначе п. 1
Для исследования представленного алгоритма была построения цифровая модель в пакете расширения Simulink системы MATLAB по следующей блок-схеме:

Рисунок 1. Схема работы цифровой модели
При составлении модели системы внешних сил и моментов, действующих на автомобиль, были приняты следующие допущения:
- автомобиль симметричен относительно продольной вертикальной плоскости, проходящей через его центр масс;
- левые и правые колеса одноименных мостов имеют одинаковые нагрузки;
- конфигурация автомобиля изображается в виде плоской фигуры;
- опорная поверхность дороги представляется в виде прямой линии, наклоненной под малым углом к горизонту;
- упругие свойства подвески не учитываются и колебания кузова не происходят.
«Блок обработки видео» представляет собой s-функцию, которая осуществляет захват и цифровую обработку видео с помощью пакетов расширения Image Acquisition Toolbox и Image Processing Toolbox.
Исходное видео разделяется на кадры, каждый из которых обрабатывается по следующему алгоритму:
- контрастирование изображения,
- обнаружение перепадов (границ) с помощью детектора Собела,
- повышение резкости изображения,
- вычисление значение глобального порога; используется метод Отсу, который выбирает порог путем минимизации различных вариантов черных и белых пикселов,
- бинаризация изображения по полученному порогу,
- морфологическое закрытие бинарного изображения с использованием структурных элементов,
- удаляет с бинарного изображения все связные компоненты (объекты), площадь которых слишком мала,
- медианная фильтрация,
- поиск связных областей пикселов объектов,
- измерение набора характеристик для каждой области, с помощью которых объект выделяется прямоугольником на каждом кадре видео.
Так как выбранный алгоритм обнаружения объектов не корректно работает в темное время суток (рисунок 2), то предлагается отключать обработку видео ночью и работать лишь с данными с лидара. Данные с лидара передаются в модель в виде расстояния до объекта.
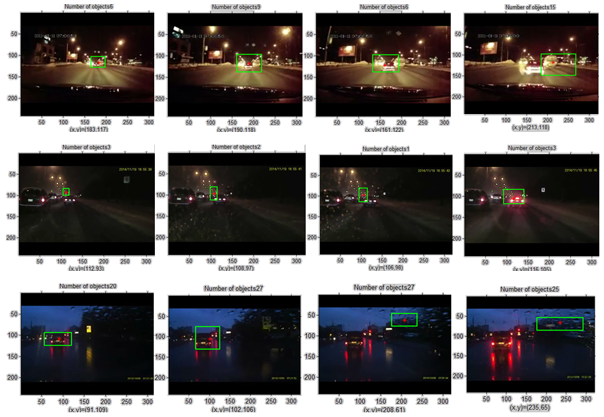
Рисунок 2. Результаты обработки видео в темное время суток и при неблагоприятных погодных условиях
Для проведения ряда экспериментов был выбран бортовой КАМАЗ-5460-73. При всех проведенных исследованиях коэффициент сцепления колеса с дорогой был один и тот же и принимал значение 0,8, при этом для упрощения считалось, что автомобиль движется по гладкой горизонтальной поверхности дороги с твердым покрытием.
При первом эксперименте ОУ движется со скоростью 10 км/ч (3 м/c), препятствие находится на расстоянии приблизительно 6 м.
Ниже (рисунок 3) представлены результаты обработки видео длительностью 5 с.


Рисунок 3. Результаты обработки видео
Проанализировав координаты центра масс выделенной области можно выяснить направление движения впереди идущего грузового автомобиля (движение осуществляется вдоль оси ординат):
• на протяжении первых трех секунд автомобиль отдаляется от нас,
• затем он приближается к нам.
По результатам моделирования установлено, что ОУ начинает тормозить на 3 секунде и тормозит в течение 1,5 секунд, при этом тормозной путь составил приблизительно 2,5 метра, что удовлетворяет требованиям ГОСТа 41.13 – 2007 “Единообразные предписания, касающиеся ТС категорий M, N и O в отношении торможения” (при скорости 10 км/ч тормозной путь не должен быть больше 2,65 м).
ОУ останавливается приблизительно на расстоянии 3,5 м от препятствия, следовательно, ДТП было предотвращено.
При втором эксперименте ОУ движется со скоростью 50 км/ч (14 м/с), препятствие находится на расстоянии приблизительно 50 м.
Ниже (рисунок 4) представлены результаты обработки видео длительностью 28 с.
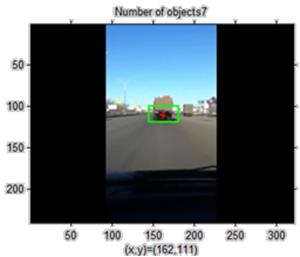

Рисунок 4. Результаты обработки видео
На вторую секунду автомобиль приближается к нам. ОУ начинает тормозить на 2 секунде и тормозит в течение 5 секунд, при этом тормозной путь составил приблизительно 36 метров, что удовлетворяет требованиям ГОСТа 41.13 – 2007 (при скорости 50 км/ч тормозной путь не должен быть больше 36,4 м).
ОУ останавливается приблизительно на расстоянии 10 м от препятствия, следовательно, столкновение автомобилей не произошло.
При третьем эксперименте была отключена обработка видео. ОУ движется со скоростью 25 м/с (90 км/ч). Показания лидара изображены на рисунке 7, препятствие изначально находилось на расстоянии 120 м от ОУ и приблизительно на 11 с должно произойти столкновение.
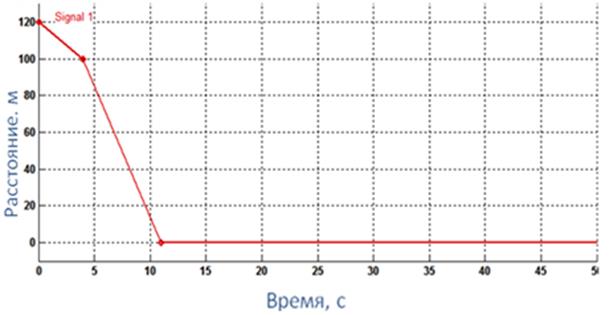
Рисунок 5. График, имитирующий показания лидара
Так как ОУ движется на большой скорости и, следовательно, тормозной путь автомобиля будет большим (по ГОСТу 41.13 – 2007 при скорости 90 км/ч тормозной путь не должен превышать значения 106 м), и ОУ начинает тормозить приблизительно на 0,4 с. что позволяет предотвратить ДТП (ОУ останавливается приблизительно на расстоянии 9 м).
Для четвертого эксперимента также была отключена обработка видео. ОУ движется со скоростью 30,5 м/с (110 км/ч). Показания лидара изображены на рисунке 8, препятствие изначально находилось на расстоянии 200 м от ОУ и приблизительно на 20 с должно произойти столкновение.

Рисунок 6. График, имитирующий показания лидара
Так как ОУ движется на большой скорости и, следовательно, тормозной путь автомобиля будет большим (по ГОСТу 41.13 – 2007 при скорости 110 км/ч тормозной путь не должен превышать значения 156 м), и ОУ начинает тормозить приблизительно на 13 с. что позволяет предотвратить ДТП (ОУ останавливается приблизительно на расстоянии 10 м).
