Статья:




Реализация одноконтурной системы автоматического регулирования в интегрированной среде разработки TRACE MODE 6
Конференция: LXXII Студенческая международная научно-практическая конференция «Молодежный научный форум»
Секция: Технические науки
Выходные данные
Жукова Е.О. Реализация одноконтурной системы автоматического регулирования в интегрированной среде разработки TRACE MODE 6 // Молодежный научный форум: электр. сб. ст. по мат. LXXII междунар. студ. науч.-практ. конф. № 3(72). URL: https://nauchforum.ru/archive/MNF_interdisciplinarity/3(72).pdf (дата обращения: 26.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 5 голосов
Мне нравится5
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

LXXII Студенческая международная научно-практическая конференция «Молодежный научный форум»
Реализация одноконтурной системы автоматического регулирования в интегрированной среде разработки TRACE MODE 6
Жукова Елена Олеговна
магистрант, Национальный исследовательский технологический университет МИСиС, РФ, г. Москва
Задача регулирования заключается в поддержании выходных величин объекта на заданном постоянном уровне или изменении её по определённому закону. Типовыми линейными законами регулирования являются: пропорциональный (P), пропорционально – интегральный (PI), пропорционально – интегрально – дифференциальный (PID) законы [3, c. 29].
В современных АСУ ТП применяются PID-регуляторы, которые путем подачи на объект единичного воздействия и анализа ответной реакции автоматически выставляют достаточно хорошие коэффициенты, поэтому в данной статье будет рассмотрен пример регулирования по ПИД закону.
Создание экрана одноконтурной системы автоматического регулирования среде разработки TRACE MODE 6
Входные переменные апериодического звена первого порядка:
- коэффициент усиления объекта (Kob);
- постоянная времени объекта (Tob);
- времени запаздывания (Tau).
Входные переменные ПИД регулятора:
- коэффициент усиления регулятора (Kr);
- времени интегрирования (Ti);
- времени дифференцирования (Td);
- величина задания давления (Dv).
Для отображения числового значения входных аргументов были созданы семь графических элементов и один графический элемент (Выход) для выходного значения, как показано на рисунке 1. Аргументы (переменные апериодического звена и ПИД регулятора) вместе с привязками показаны на рисунке 2.
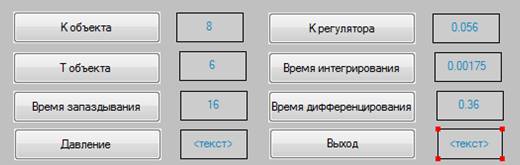
Рисунок 1. Изображение экрана

Рисунок 2. Аргументы и привязки
Программа создания системы регулирования на языке Техно FBD
Для создания системы управления выбраны следующие блоки: из раздела «Арифметические Функции» - вычитание (X–Y); из раздела «Регулирование» - модель объекта (OBJ) и звено PID [2, c. 56]. Программа на языке Техно FBD показана на рисунке 3.
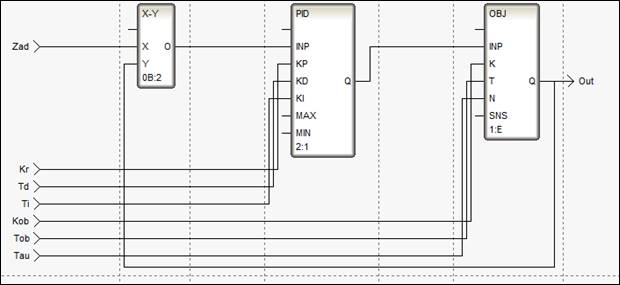
Рисунок 3. Программа на языке Техно FBD
Расчет ПИД-регулятора
Коэффициенты апериодического звена ![]() ,
, ![]() ,
, ![]() .
.
Расчёт параметров регулятора для нахождения всех коэффициентов:
![]() ; (1)
; (1)
![]() ; (2)
; (2)
![]() ; (3)
; (3)
![]() ; (4)
; (4)
![]() . (5)
. (5)
1/![]() = 0,00175 (6)
= 0,00175 (6)
Результат моделирования (после расчётов) представлен на рисунках 4 и 5.
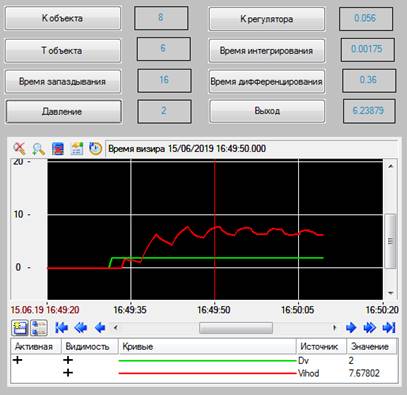
Рисунок 4. ПИД - регулирование (неустановившийся режим)
Основным показателем качества системы управления является устойчивость. Понятие устойчивости системы управления связано со способностью системы возвращаться в состояние равновесия после снятия внешних воздействий, которые вывели её из этого состояния [1, c. 47].

Рисунок 5. ПИД – регулирование (установившийся режим)
В рассмотренном выше примере система через определенный промежуток времени переходит в состояние равновесия (рисунок 4 и 5), следовательно, она является устойчивой, и реализация одноконтурной системы автоматического регулирования произведена правильно.
Список литературы:
1. Арефьев, В. Н. Основы теории управления и автоматики: учебное пособие / В. Н. Арефьев, С. К. Киселев. – Ульяновск: УлГТУ, 2014. – 315 с.: ил.
2. Ефимов, И. П. SCADA-система TraceMode / И. П. Ефимов, Д. А. Солуянов. – Ульяновск: УлГТУ, 2010. – 158 с.
3. Ротач, В. Я. Теория автоматического управления: учебник для вузов / В. Я. Ротач. – 5-е изд., перераб. и доп. – Москва: Издательский дом МЭИ, 2008. – 396 с.: ил.
