Статья:




ПИД-регулятор для микроконтроллеров на примере Arduino
Секция: Технические науки
Выходные данные
Бережанский О.А. ПИД-регулятор для микроконтроллеров на примере Arduino // Технические и математические науки. Студенческий научный форум: электр. сб. ст. по мат. XXXV междунар. студ. науч.-практ. конф. № 12(35). URL: https://nauchforum.ru/archive/SNF_tech/12(35).pdf (дата обращения: 29.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

XXXV Студенческая международная научно-практическая конференция «Технические и математические науки. Студенческий научный форум»
ПИД-регулятор для микроконтроллеров на примере Arduino
Бережанский Олег Александрович
студент, Псковский государственный университет, РФ, г. Псков
Классический пропорционально-интегрально-дифференциальный регулятор – это устройство для поддержания заданного значения, при помощи полученного сигнала по обратной связи и плавного регулирования системы. В такой системе выходной сигнал влияет на входной сигнал, то есть система состоит из управляющего устройства (микроконтроллер), исполнительного (привод, нагреватель) и обратной связи (датчик положения или температуры).
В зависимости от сложности системы, использование ПИД-регулятора может быть заменено позиционным регулированием. Этот способ приоритетнее для более простых систем, где происходит сравнение входного значения с заданным, при рассогласование системы поступает сигнал на корректирующее устройство. Работа системы происходит из-за зоны нечувствительности, называемая гистерезисом. Так для системы поддержания температуры, гистерезис устанавливается в градусах, и срабатывание корректирующего воздействия происходит после выхода значения температуры за зону нечувствительности. При таком методе регулирования страдает точность работы системы, так как приходится регулировать незатухающие колебания.
Для систем с необходимостью высокой точности и плавного регулирования используют ПИД-регулятор. Этот регулятор работает с помощью трех составляющих: пропорциональной, интегрирующей, дифференцирующей.
Первая составляющая учитывает разницу заданного и фактического значения, пытаясь компенсировать эту разницу.
Закон пропорционального регулирования:

где e(t) это ошибка рассогласования значений.
В данном методе будет присутствовать статическая ошибка, которая уменьшается при увеличении коэффициента, но многократное увеличение коэффициента приведет к неустойчивости системы.
Для устранения статической ошибки используется интегральная составляющая. Основным действием интегрирующего регулятора является умножение ошибки рассогласования и прибавление к предыдущему значению интегрирующего звена. А при выходе системы на требуемое значение интегральная составляющая перестает изменяться и не влияет на систему.
Закон интегрального регулирования:
 .
.
Дифференциальная составляющая предназначена для противодействия отклонения от заданного значения. Она пропорциональна темпу изменения ошибки. В данном законе регулирования проблемой является неустойчивость к воздействия шумов.
Закон дифференциального регулирования:
 .
.
Классическая система с ПИД-регулятора представлена на рисунке 1.
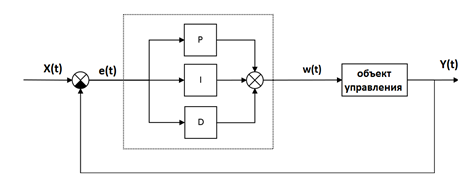
Рисунок 1. Структурная схема системы с ПИД регулятором
Для работы данной системы на микроконтроллере, программа использует функцию с полученным значением с датчика, значение установки и значения коэффициентов ПИД, а также время.
Установленное время – это условно частота опроса системы, коэффициенты – настройка регулирования, значение установки – требуемое для поддержания значение, полученное значение – это величина ошибки. Управляющий сигнал будет определяться следующей формулой:
 .
.
В зависимости от системы, какие-то коэффициенты могут равняться нулю, и тогда это звено регулятора не будет воздействовать на систему.
В примере поддержания температуры, ПИД-регулятор оказывает возмущающую ошибку на отклонения от заданного значения температуры, и коэффициенты настройки будут индивидуальны, зависящие от точности и быстродействия системы.
В примере регулирования плавности привода, ПИД-регулятор может выступать в роли демпферного устройства, то есть сглаживать и снижать резко изменяющиеся значения. Обратная связь в данном случае, если рассматривать на примере сервопривода, может быть взята из действительного положения вала.
На рисунке 2 представлен пример исполнительного механизма «руки» с возможностью перемещения в двух плоскостях, на базе мк. Atmega 328.
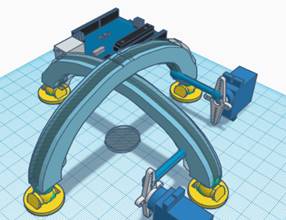
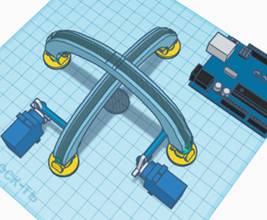
Рисунок 2 . Механизм привода двухосевой «руки»
В данном случае без применения ПИД-регулятора, например при резком изменение положение джойстика механизмы получат удар, что ведет помимо неправильного выполнения действия и к повышенному износу установки.
Выводы:
За время работы по указанной тематике были рассмотрены и решены следующие поставленные задачи:
- Изучены особенности ПИД регулирования.
- Разработан проект механизма двухосевой «руки» с ПИД регулирование на базе микроконтроллера Atmega 328.
Список литературы:
1. Основы теории автоматического управления. – [Электронный ресурс] – режим доступа. – URL: https://www.tstu.ru/book/elib/pdf/2004/lazarev1.pdf (Дата обращения 14.12.2020).
