ЛАЗЕРНАЯ СВЯЗЬ С ПРИМЕНЕНИЕМ КВАДРОКОПТЕРОВ
Конференция: LXX Международная научно-практическая конференция «Научный форум: инновационная наука»
Секция: Технические науки

LXX Международная научно-практическая конференция «Научный форум: инновационная наука»
ЛАЗЕРНАЯ СВЯЗЬ С ПРИМЕНЕНИЕМ КВАДРОКОПТЕРОВ
LASER COMMUNICATION WITH APPLICATION QUADROCOPTERS
Boris Kuzyakov
Candidat of physics and mathematics Science, Laser Association; associate professor, RTU MIREA, Russia, Moscow
Аннотация. В статье рассматривается применение квадрокоптеров в телекоме. Коптеры исследовались в режимах «зависания». Сравнивались ретрансляторы разных типов, включая схему с зеркальным переотражением.
Abstract. The article discusses the use of quadrocopters in telecom. Copters were studied in "hover" modes. Different types of repeaters were compared, including a scheme with mirror re-reflection.
Ключевые слова: квадрокоптер, телеком, режим, зависание, ретранслятор, зеркало, отражение.
Keywords: quadcopter, telecom, mode, hover, repeater, mirror, reflection.
Лазерные системы связи обладают целым рядом неоспоримых преимуществ в сравнении с РЧ-каналами. К главным относятся: 1) Повышенная конфиденциальность. Практически реализуется система связи – «точка» - «точка». 2) скорость передачи телекоммуникационной информации может быть в несколько десятков и сотен раз выше, чем в РЧ-каналах. Актуальность их внедрения подтверждается запуском НАСА в ближний космос, мощного лазерного ретранслятора телекоммуникационных сигналов. Уникальная установка может передавать информационные данные со скоростью 1,2 Гбит в секунду. В наше, представляет большой интерес применение квадрокоптеров, в телекоме [1- 5].
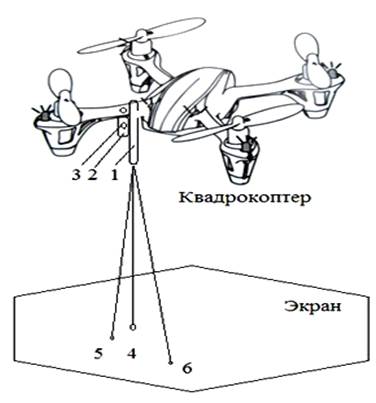
Рисунок 1. Схема квадрокоптера с лазерным источником (режим «зависания»): 1 – полупроводниковый лазер с аккумуляторами; 2, 3 – детали крепления; 4-6 – изображения лазерного луча на экране
Приобретенные коптеры исследовались в режимах «зависания» вблизи РТУ МИРЭА. На коптер был установлен полупроводниковый лазер с аккумулятором (рисунок 1). Измерялись зависимости изменения угла наклона лазерного излучения в открытом пространстве для квадрокоптеров SYMA и MPP. Временной интервал между сериями измерений N (1) и (2) – составлял 20 минут.
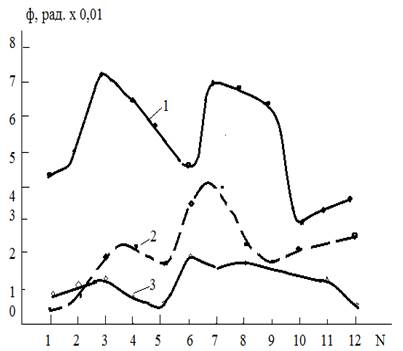
Рисунок 2. Зависимость изменения угла наклона лазерного излучения для квадрокоптеров: 1 - SYMA X5SW, h = 2 м; DJI MPP (2, 3), 2 - h = 0,8 м; 3 – h =1,2 м
В среднем, углы наклона лазерного излучения, измеренные в опытах на МРР в два раза меньше, чем на SYMA. Если использовать готовые модули системы «БОКС», без стоек крепления, то суммарный вес модулей (паспортные данные), без системы питания, составит ~ 2 х 8 кг =16 кг. В наше время, в парке предлагаемых ГКР, имеются модели с требуемыми параметрами, часть из них приведена в таблице 1.
Таблица 1.
Модели ГРП
|
Пп. |
Модель |
Максимальн. груз, кг |
Стоимость, тыс руб. |
|
1 |
MATRICE 600 PRO |
6 |
300 т.р. |
|
2 |
SteadDroneQU4DX |
8 |
460 т.р. |
|
3 |
Freefly ALTA 8 |
12,5 |
700 т.р. |
|
4 |
Versadrones Heavy |
12,5 |
800 т.р. |
|
5 |
Airborg H8 10K |
15 |
1400 т.р. |
|
6 |
Aerones drone |
100 |
≥ 5000 т.р. |
|
7 |
DJI МРР |
0,2 |
6,5 т.р. |
|
8 |
SYMА |
0,1 |
3,2 т .р. |
Второй вариант моделирования. В этом варианте использовали плоский дисковый зеркальный отражатель (зеркало бытового типа), диаметром 150 мм, закрепленный на МРР. В этом варианте, лазерный излучатель находился на земле в плоскости экрана. Высота подъема квадрокоптера с отражателем составляла h = 3 м. C учетом наличия «розы ветров», особенно в условиях пересеченной местности, предпочтение остается за использованием отражателей [4 - 5] кругового типа. Как известно, разные металлы имеют разные коэффициенты [3 - 5] отражения, некоторые из них, приведены в табл. 2.
Таблица 2.
Коэффициент отражения некоторых металлов
|
Длина волны, мкм
Металл |
Коэффициенты отражения % |
||||
|
0,76
|
1,0
|
2,0
|
5,0
|
10,0
|
|
|
Серебро, химич. способ |
96,0 |
97,5 |
97,8 |
98,5 |
98,7 |
|
Полированная медь |
83,0 |
90,1 |
95,5 |
96,8 |
98,5 |
|
Золото, химич. способ |
92,0 |
94,7 |
96,5 |
96,9 |
97,7 |
|
Полированный алюминий |
72 |
75 |
86 |
- |
- |
|
Сталь |
57 |
63 |
77 |
89 |
93 |
Как видно таблицы, наиболее высокими коэффициентами отражения, в видимой и ближней ИК областях, обладают: серебро (~ 0,98), в широком спектральном диапазоне, полированная медь и золото. Для получения коэффициентов отражения еще ближе к 1, созданы диэлектрические зеркала с многослойным отражающем слоем. Грузовые Автоколонны, проходя по пересеченной местности, нуждаются в коптерах (рисунок 3).
 а)
а)
 б)
б)
 в)
в)
Рисунок 3. Грузовые Авто на сложных дорогах: а) автоколонна с гуманитарной помощью; б) лазерный ретранслятор на квадрокоптере (сплошные тонкие линии – лазерное излучение), справа – входящее излучение от источника, слева- отраженное излучение на приемник; в) фура с приемной антенной на крыше кабины (серый вытянутый овал)
Типичный размер крыши кабины фуры – (2,4 х 2.5) м, поэтому приёмная антенна, при установке на кабине, может иметь такие же размеры, не выходящие за габариты фуры. При необходимости, размеры приёмной антенны могут быть увеличены, например - до ( 2,4 х 6 ) м, при установке на крыше кузова Нужно отметить, что на трассах, протяженностью 70 - 100 м, диаметр лазерного излучения в системах АОЛС, в плоскости приемника, как правило, может не превышать 30 - 50 см, даже без использования дополнительных телескопов. Поэтому, в рассматриваемой геометрии с приведенными параметрами пучка, лазерная связь между передатчиком и приёмником весьма устойчива, даже при некоторых флуктуациях зеркала – ретранслятора, установленного на квадрокоптере.
Как известно, для качественного проектирования и анализа необходимы математические представления динамики модели. В ряде работ проанализирована стабильность динамики квадрокоптеров. В частности, в работе [ 8 ] проводился анализ устойчивости вертолетов с прямолинейным движением с добавлением некоторых особенностей, специфичных для квадрокоптеров. Базовая модель квадрокоптера включала динамику жесткого тела с дополнительными силами и крутящими моментами, без учета аэродинамики (рисунок 4).
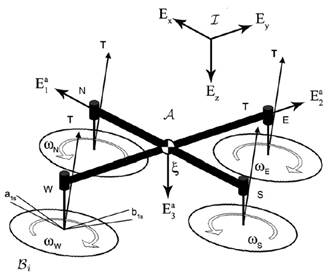
Рисунок 4. Упрощённая динамическая модель квадрокоптера
Линеаризованные дифференциальные уравнения для летательного аппарата получаются из решения семейства уравнений для ускорений по тангажу и перемещению по оси x, и приводятся к следующему виду:
mẍ=-mg![]() -mgθ (1)
-mgθ (1)
IYY Ӫ=4dCT ρAr2![]() + mga1x h -
+ mga1x h -![]() Ar
Ar![]() d2
d2 ![]() (2)
(2)
Из уравнений (1 - 2) выводится матрица стабильности летательного аппарата и можно выразить передаточную функцию H = θ/δω , зависящую от угла θ и дифференциального изменения скорости моторов δω [ 7 - 8 ]:
H=![]() (3)
(3)
где: с1 = ![]() ; c2 = ρAr
; c2 = ρAr![]() c3 =
c3 =![]() ;
;
Угол взмаха a1x аппроксимируется линейной функцией:
a1x = c1ẋ + c3![]() (4)
(4)
Подставляя в (3) реальные параметры квадрокоптера и проводя анализ, определили диапазоны изменения параметров регулирования системы стабилизации.
Наряду с современными математическими представлениями, необходимо отметить значительный прогресс в развитии систем управления квадрокоптерами. В частности, в наше время, дистанционное управление (ДУ) квадрокоптера реализуется с помощью LCD экрана. LCD экран отображает различные системные статусы, включающие телеметрию полета, уровень заряда батареи в режиме реального времени. Для большей конкретности, недавний вариант LCD экрана ДУ приведен на рисунке 5.
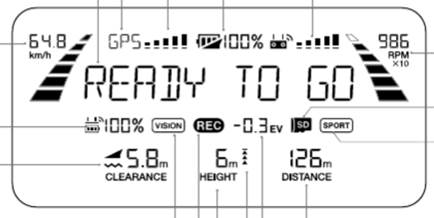
Рисунок 5. Недавний вариант LCD экрана ДУ
На современном экране ДУ можно выделить 18 знаков, отмеченных сплошными тонкими линиями: например: слева, вверху – скорость полета – 64,8 км/час; 2-й слева, вверху – контроль полёта – GPS; 3-й слева, вверху – регулируемый уровень сигнала GPS; справа, середина - режим полёта – SPORT; внизу, середина – высота полета – 6 м; справа от него – выбор другой высоты. Выведенная на экран ДУ многогранная информация позволяет выбирать необходимые режимы движения квадрокоптера, включая режим «зависания» над выбранным местоположением и на определенной высоте. Режим «зависания» квадрокоптера на выбранной высоте наглядно представлен на рисунке 3 б.
На рисунке 6 показан вариант современного квадрокоптера «легкого типа» с видеокамерой высокого разрешения, переднего обзора [6].

Рисунок 6. Вариант конструкции современного 4-х моторного квадрокоптера «легкого типа»
Краткие выводы. 1) Лазерная связь обладает большей чем в 100 раз, скоростью передачи информации в телекоме, в сравнении с РЧ диапазоном. 2) Лазерным телекоммуникациям свойственна наивысшая конфиденциальность. 3) Квадрокоптеры имеют широкий спектр применений для эффективной ретрансляции сигналов оптического диапазона как в гражданских, так и в военных сегментах жизнедеятельности современного общества.
