ОБЗОР ТЕХНОЛОГИЙ ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ В РЕАЛЬНОМ ВРЕМЕНИ
Конференция: LXXII Международная научно-практическая конференция «Научный форум: инновационная наука»
Секция: Физико-математические науки

LXXII Международная научно-практическая конференция «Научный форум: инновационная наука»

ОБЗОР ТЕХНОЛОГИЙ ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ В РЕАЛЬНОМ ВРЕМЕНИ
OVERVIEW OF REAL TIME LOCAL POSITIONING TECHNOLOGIES
Konstantin Titov
Candidate of Physical and Mathematical Sciences, associate Professor, Voronezh State University, Russia, Voronezh
Elizaveta Golovatskaya
Master's student, Voronezh State University, Russia, Voronezh
Аннотация. Целью работы является изучение методов систем локального позиционирования в реальном времени. В работе рассмотрены характеристики и особенности применения основных методов позиционирования, которые являются ключевыми при разработке высокоэффективных RTLS-решений, отвечающих растущим потребностям в современном мире.
Abstract. The purpose of the work is to study the methods of local positioning systems. The work considers the characteristics and features of the application of basic positioning methods, which are key in the development of highly efficient RTLS solutions that meet the growing needs in the modern world.
Ключевые слова: автоматизированная система RTLS, триангуляция, трилатерация, угловые измерения, fingerprinting (радиочастотные отпечатки), инерциальные измерения.
Keywords: RTLS automated system, triangulation, trilateration, angular measurements, fingerprinting.
Системы локального позиционирования в реальном времени – Real Time Location System (RTLS) играют все более важную роль в современных приложениях, требующих точного определения местоположения объектов в ограниченном пространстве. Такие системы находят применение в логистике, промышленной автоматизации, «умных» городах, медицине и многих других областях. Для создания эффективных RTLS-решений необходимо глубокое понимание различных методов позиционирования и их особенностей. Среди них можно выделить три группы, оцениваемых параметров, используемых наиболее часто [2]:
‒ уровень принимаемого сигнала;
– угол прибытия принимаемого сигнала;
– время распространения сигнала.
Системы локального позиционирования в реальном времени становятся важным элементом концепции «умного города», позволяя отслеживать перемещение людей и транспорта, управлять доступом и повышать безопасность.
Метод Received Signal Strength Indicator (RSSI), основанный на измерении по уровню принимаемого сигнала, позволяет определить местоположение устройства, основываясь на измерении уровня амплитуды сигнала, полученного устройствами ![]() ,
, ![]() ,
, ![]() (базовыми станциями, имеющими несколько антенн, вращающуюся антенну или фазированную антенную решетку) от источника
(базовыми станциями, имеющими несколько антенн, вращающуюся антенну или фазированную антенную решетку) от источника ![]() (мобильного устройства). Когда источник
(мобильного устройства). Когда источник ![]() находится в зоне покрытия базовых станций
находится в зоне покрытия базовых станций ![]() ,
, ![]() ,
, ![]() , считывающие устройства измеряют силу принимаемого сигнала, что проиллюстрировано на рисунке 1. После ее измерения со всех доступных базовых станций
, считывающие устройства измеряют силу принимаемого сигнала, что проиллюстрировано на рисунке 1. После ее измерения со всех доступных базовых станций ![]() ,
, ![]() ,
, ![]() система использует эти данные для определения местоположения объекта. Это может быть достигнуто путем применения методов триангуляции или других алгоритмов анализа, которые используют измерения RSSI и информацию о местоположении базовых станций для определения точного местоположения.
система использует эти данные для определения местоположения объекта. Это может быть достигнуто путем применения методов триангуляции или других алгоритмов анализа, которые используют измерения RSSI и информацию о местоположении базовых станций для определения точного местоположения.
Реализация метода RSSI в RTLS-системах требует хорошего планирования и настройки системы, а также калибровки для обеспечения точности и надежности определения местоположения. Он может быть эффективным для отслеживания внутри помещений или в ограниченных областях, где доступны базовые станции или считывающие устройства.
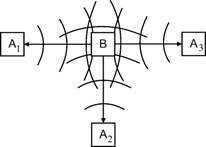
Рисунок 1. Метод RSSI
Рассмотрим методы, основанные на определении местоположения по углу прибытия сигнала. Например, метод расчета угла прибытия – Angle of Arrival (AoA) широко используется во многих радиопеленгационных приложениях и основан на определении направления от источника сигнала ![]() с одной антенной, за счёт измерения разницы во времени прихода сигнала на базовых станциях
с одной антенной, за счёт измерения разницы во времени прихода сигнала на базовых станциях ![]() ,
, ![]() , которые имеют от трех до шести антенных решеток, обеспечивающих измерение фазовых разностей. Сигналы, полученные от различных элементов антенны, обрабатываются для определения фазовых сдвигов между ними, с помощью которых определяется угол прихода сигнала
, которые имеют от трех до шести антенных решеток, обеспечивающих измерение фазовых разностей. Сигналы, полученные от различных элементов антенны, обрабатываются для определения фазовых сдвигов между ними, с помощью которых определяется угол прихода сигнала ![]() ,
, ![]() на приемник (рис. 2). Данные вычисления могут быть выполнены с использованием геометрических расчетов, таких как триангуляция или методы моделирования сигнала.
на приемник (рис. 2). Данные вычисления могут быть выполнены с использованием геометрических расчетов, таких как триангуляция или методы моделирования сигнала.
Метод AOA обеспечивает высокую точность определения угла прихода сигнала, однако требует более сложной реализации и может быть чувствителен к помехам. Тем не менее, метод является полезным в приложениях, где необходимо точно определять местоположение и направление источника сигнала.
Существует также метод расчета угла отправления сигнала Angle of Departure (AoD). В настоящее время данный метод широко не используется, но вызывает растущий интерес к таким областям применения, как поиск путей, робототехника и приложения с искусственным интеллектом, в которых движущийся объект (которым может быть смартфон, планшет или робот) обладает интеллектом для вычисления собственного местоположения. В методе AoD сигнал отправляется устройствами ![]() ,
, ![]() с несколькими антеннами решетками в фиксированных положениях и передается на устройство
с несколькими антеннами решетками в фиксированных положениях и передается на устройство ![]() с одной антенной (рис. 3). Используя антенны с множеством элементов, можно управлять фазовыми разностями между излучаемыми сигналами, чтобы достичь желаемого угла вылета сигнала
с одной антенной (рис. 3). Используя антенны с множеством элементов, можно управлять фазовыми разностями между излучаемыми сигналами, чтобы достичь желаемого угла вылета сигнала ![]() ,
, ![]() . Это может быть выполнено путем регулировки фазы сигналов на различных элементах антенны.
. Это может быть выполнено путем регулировки фазы сигналов на различных элементах антенны.
Метод AoD, также как и метод AoA, требует использования антенн с множеством элементов на передатчике и сложных алгоритмов управления излучением сигнала, что увеличивает стоимость и сложность системы. Данный метод может использоваться для определения угла вылета радиосигнала с передатчика и применяться в беспроводных системах для определения местоположения и направления передатчика [1].
Метод измерения фазы принимаемого сигнала, Phase Difference of Arrival (PDoA), с помощью которого можно определить местоположение устройства ![]() , посылающего сигнал в устройство
, посылающего сигнал в устройство ![]() с известным положением, которое должно иметь по крайней мере две антенны, размещенных на определенном расстоянии друг от друга, и быть способным измерять разницу в фазе несущей (рис.4). Данные антенны получают сигналы от источника
с известным положением, которое должно иметь по крайней мере две антенны, размещенных на определенном расстоянии друг от друга, и быть способным измерять разницу в фазе несущей (рис.4). Данные антенны получают сигналы от источника ![]() и позволяют измерить разность фаз
и позволяют измерить разность фаз ![]() между сигналами. Это может быть выполнено путем вычисления фазовых разностей или использования алгоритмов обработки сигнала, таких как корреляция или фазовая фильтрация. На основе измеренной разности фаз
между сигналами. Это может быть выполнено путем вычисления фазовых разностей или использования алгоритмов обработки сигнала, таких как корреляция или фазовая фильтрация. На основе измеренной разности фаз ![]() вычисляется разность времени прихода сигнала на антенны, представленная в виде:
вычисляется разность времени прихода сигнала на антенны, представленная в виде: ![]() , где
, где ![]() – частота сигнала.
– частота сигнала.
После вычисления разности времени прихода на антенны, можно определить направление источника сигнала с помощью алгоритмов локализации (триангуляции) или разницу расстояний от источника ![]() до приемного устройства
до приемного устройства ![]() , которая может определяться в виде
, которая может определяться в виде ![]() , где
, где
![]() – скорость движения волны [4].
– скорость движения волны [4].
Метод PDOA обеспечивает высокую точность измерения разности времени прихода сигнала, однако требует более сложной реализации, поскольку задействует использование нескольких приемников или антенн и сложных алгоритмов обработки сигнала.
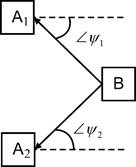
Рисунок 2. Метод AoA
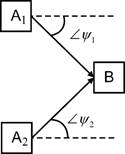
Рисунок 3. Метод AoD
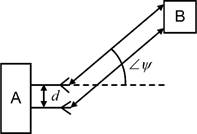
Рисунок 4. Метод PDoA
Обратимся к методам, использующим измерение времени распространения сигнала. Метод ToF основан на измерении времени пролета ![]() , которое тратит электромагнитная волна на преодоление расстояния между устройством
, которое тратит электромагнитная волна на преодоление расстояния между устройством ![]() до устройства
до устройства ![]() и возвращения к
и возвращения к ![]() после его отражения от
после его отражения от ![]() что проиллюстрировано на рисунке 5. Перед началом работы необходимо синхронизировать все устройства, чтобы они имели общий временной отсчет. Это обеспечит точность измерений времени полета
что проиллюстрировано на рисунке 5. Перед началом работы необходимо синхронизировать все устройства, чтобы они имели общий временной отсчет. Это обеспечит точность измерений времени полета ![]() сигналов между передатчиком
сигналов между передатчиком ![]() и приемником
и приемником ![]() . Время пролета
. Время пролета ![]() рассчитывается для сигнала, который достигает приемника
рассчитывается для сигнала, который достигает приемника ![]() напрямую, например, через стену, а остальные сигналы, поступающие с задержкой из-за отражения сигнала от препятствий, игнорируются из-за большего пройденного ими расстояния. Получив это время
напрямую, например, через стену, а остальные сигналы, поступающие с задержкой из-за отражения сигнала от препятствий, игнорируются из-за большего пройденного ими расстояния. Получив это время ![]() , можно вычислить расстояние от устройства
, можно вычислить расстояние от устройства ![]() до
до ![]() , которое может быть представлено в виде
, которое может быть представлено в виде ![]() .
.
В основном, метод ToF базируется на технологиях беспроводной связи, подпадающих под действие группы стандартов IEEE 802.15.4a [3], поддерживающих важную опцию измерения времени распространения.
Примером метода, основанного на измерении времени распространения сигнала, может являться метод двухстороннего двунаправленного измерения расстояния – Two-Way-Ranging (TWR), в котором расстояние между устройством с известным местоположением ![]() и устройством
и устройством ![]() , находящимся на неопределенной дальности, определяется путем измерения времени, которое требуется сигналу для распространения от
, находящимся на неопределенной дальности, определяется путем измерения времени, которое требуется сигналу для распространения от ![]() до устройства
до устройства ![]() и обратно. Устройство
и обратно. Устройство ![]() инициирует связь, посылая сообщение, адресованное эталонному устройству
инициирует связь, посылая сообщение, адресованное эталонному устройству ![]() , которое записывает время его получения
, которое записывает время его получения ![]() , а также время отправления сигнала обратно
, а также время отправления сигнала обратно ![]() . Когда сигнал достигает приемника
. Когда сигнал достигает приемника ![]() , то вычисляет время прохождения сигнала на основе разницы между временем передачи
, то вычисляет время прохождения сигнала на основе разницы между временем передачи ![]() и временем прихода ответа
и временем прихода ответа ![]() , что показано на рисунке 6. Тогда расстояние между устройствами может определяться в виде выражения
, что показано на рисунке 6. Тогда расстояние между устройствами может определяться в виде выражения ![]() .
.
В целом, метод TWR обеспечивает высокую точность измерения дистанции или времени прохождения сигнала, но требует синхронизации и сложной реализации. Кроме того, данный метод может иметь ограничения в рабочем диапазоне, особенно при использовании высокочастотных сигналов.
Существует также метод симметричного двухстороннего двунаправленного измерения расстояния – Symmetrical-Double-Sided Two-Way Ranging (SDS-TWR), являющийся усовершенствованием метода TWR, который использует симметричный обмен сигналами и использование времени распространения сигнала между приемо-передающими устройствами. Расстояние между устройствами определяется таким же образом, как и в TWR методе, их отличие заключается в измерении нескольких таких расстояний для повышения точности определения расстояния. В каждом цикле устройства происходит обмен временем передачи сигнала, измеренным самими устройствами. После двух измерений время прохождения сигнала можно вычислить с погрешностью, достаточной для получения дециметровой и даже сантиметровой точности [5].
Данный метод устойчив к помехам и многолучевому распространению сигнала, так как использует время распространения сигнала до устройства ![]() и обратно. Однако для определения расстояния требуется двусторонний обмен сигналами между устройствами, что увеличивает сложность протокола и время определения местоположения.
и обратно. Однако для определения расстояния требуется двусторонний обмен сигналами между устройствами, что увеличивает сложность протокола и время определения местоположения.
Альтернативным является метод измерения времени прихода – Time Difference of Arrival (TDoA), который основан на измерении разницы во времени передачи сигнала от устройства ![]() до нескольких эталонных устройств
до нескольких эталонных устройств ![]() ,
, ![]() ,
, ![]() , расположенных в известных местах и синхронизированных друг с другом (рис.7). Каждый приемник фиксирует момент времени, когда он принял сигнал от передатчика. Для каждой пары приемников вычисляется разница времени прихода сигнала
, расположенных в известных местах и синхронизированных друг с другом (рис.7). Каждый приемник фиксирует момент времени, когда он принял сигнал от передатчика. Для каждой пары приемников вычисляется разница времени прихода сигнала ![]() , где
, где ![]() и
и ![]() – моменты времени, когда сигнал был принят i-м и j-м приемниками соответственно. Используя измеренные разницы времени прихода сигнала, можно построить гиперболы, пересечение которых (не менее трех) позволяет вычислить местоположение передатчика, при этом каждая пара приемников определяет одну гиперболу. Математически, местоположение передатчика
– моменты времени, когда сигнал был принят i-м и j-м приемниками соответственно. Используя измеренные разницы времени прихода сигнала, можно построить гиперболы, пересечение которых (не менее трех) позволяет вычислить местоположение передатчика, при этом каждая пара приемников определяет одну гиперболу. Математически, местоположение передатчика ![]() можно найти, решая систему нелинейных уравнений, полученных из измеренных разниц времени прихода
можно найти, решая систему нелинейных уравнений, полученных из измеренных разниц времени прихода ![]() :
: ![]() , где
, где ![]() и
и ![]() – координаты i-го и j-го приемников.
– координаты i-го и j-го приемников.
Таким образом, метод TDOA обеспечивает высокую точность определения местоположения или направления источника сигнала на основе временных разностей прихода сигнала на различные приемники, но требует сложной реализации и точной синхронизации.
Методы, основанные на измерении времени распространения сигнала, используются в сверхширокополосных системах связи, в системах радиочастотной идентификации – Radio Frequency Identification, в спутниковой системе навигации – Global Positioning System, Wi-Fi, например, широкополосный модуль DWM1000 используется в системах позиционирования TWR или TDoA для определения местоположения цели с точностью менее 10 см.

Рисунок 5. Метод AoA

Рисунок 6. Метод AoD
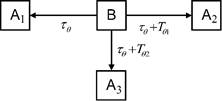
Рисунок 7. Метод PDoA
Таким образом, в настоящее время рассмотренные методы позиционирования нашли широкое применение в различных сферах деятельности. Каждый из них обладает своими преимуществами и ограничениями, которые необходимо учитывать при проектировании RTLS-систем. Использование данных методов позволяет оптимизировать использование ресурсов, сократить время на поиск необходимых предметов и предотвратить их потери. Характеристики методов и особенности их применения являются ключевыми при разработке высокоэффективных RTLS-решений, отвечающих растущим потребностям современного мира.
