Предложение по разработке устройства дистанционного управления башенной установкой БПУ-1 бронетранспортера БТР-80
Конференция: XL Международная научно-практическая конференция «Научный форум: инновационная наука»
Секция: Технические науки

XL Международная научно-практическая конференция «Научный форум: инновационная наука»

Предложение по разработке устройства дистанционного управления башенной установкой БПУ-1 бронетранспортера БТР-80
PROPOSAL FOR DEVELOPMENT OF REMOTE CONTROL DEVICE FOR TOWER PLANT BPU-1 FOR ARMORED BTR-80 ARMOR
Vadim Malyshev
Cadet of the Faculty of Technical Support, Perm Military Institute of the Russian National Guard Troops, Russia, Perm
Ivan Maltsev
Cadet of the Faculty of Technical Support, Perm Military Institute of the Russian National Guard Troops, Russia, Perm
Roman Streltsov
Cand. ped. Sciences, Associate Professor, Perm Military Institute of the Russian National Guard Troops, Russia, Perm
Аннотация. Целью работы является возможность разработки и использования дистанционного управления башенной пулеметной установки БПУ-1 бронетранспортера БТР-80. Устройство дистанционного управления башенной пулеметной установкой предназначено для ее управления на заданный угол. Проектируемое устройство легко устанавливается на поворотный и подъемный механизм и может работать как с использованием электрического, так и механического приводов.
Abstract. The aim of the work is to develop and use remote control of the BPU-1 turret machine gun installation of the BTR-80 armored personnel carrier. The remote control device of the turret machine gun mount is designed to control it at a given angle. The projected device is easily installed on the swivel and lifting mechanism and can work with both electrical and mechanical drives.
Ключевые слова: башенная пулеметная установка; бронетранспортер; дистанционное управление; поворотный и подъемные механизмы.
Keywords: turret machine gun; armored personnel carrier; remote control; rotary and lifting mechanisms.
Колесные и гусеничные бронетранспортеры (БТР) являются высокомобильными бронированными транспортными средствами для ведения активных, высокоманевренных и скоротечных боевых действий, имеющих мощное вооружение, высокую бронезащищенность, мобильность и высокоэффективную силовую установку. Ведущие производители боевых машин всех стран, учитывая данные обстоятельства, оперативно работают с программами модернизации бронированных боевых машин, которые предусматривают повышение не только отдельных показателей, но и всего комплекса боевых и технических характеристик.
Эффективность применения БТР достигается наличием башенного вооружения, позволяющего наносить значительный урон живой силе, а также легкобронированным средствам вооружения противника. Успешное применение огневых возможностей башенного вооружения подтверждено различными локальными и вооруженными конфликтами, частота возникновения которых в последнее время в мире постоянно увеличивается.
Одним из ключевых условий применения башенного вооружения при ведении боевых действий является использование средств обеспечения его подвижности и управляемости, в том числе учитывая морально-психологическое состояние использующего его личного состава при противодействии огню противника. Это может выражаться в том, что в случае прямого огневого воздействия противника по ББМ, экипаж бронетранспортера в интересах выполнения боевой задачи, а также в результате действия инстинкта самосохранения будет вести противодействующий огонь, не уделяя должного внимания прицеливанию и наводке оружия на цель.
В настоящей работе рассматривается возможность применения дистанционного управления башенной пулеметной установки БПУ-1 бронетранспортера БТР-80.
Для решения поставленной задачи необходимо спроектировать и разработать устройство вычисляющее угол поворота башенной пулеметной установки БПУ-1 в горизонтальной плоскости, а так же угол перемещения люльки с пулеметами в вертикальной плоскости. За основу берется разработанное ранее устройство определения угла поворота механической детали [1].
Устройство дистанционного управления башенной пулеметной установкой предназначено для ее управления на заданный угол. Проектируемое устройство легко устанавливается на поворотный и подъемный механизм и может работать как с использованием электрического, так и механического приводов.
В основу работы проектируемого механизма заложен принцип действия энкодера. В энкодере сфокусированный луч света направлен на совмещенный с излучателем фотоприемник, периодически прерывается вращающимся диском, расположенным на расстоянии 0,3 мм от приемника и передатчика света, который в свою очередь закреплен на валу контролируемого объекта (подъемный и поворотный механизмы БПУ-1). Для этого используется диск с нанесенным на него кодированным рисунком.
Дистанционное управление башенной пулеметной установкой БПУ-1 может осуществляться как с места наводчика пулемета или командира машины, так и на удалении от бронетранспортера на расстоянии до 2000 метров, в зависимости от используемого передатчика (Bluetooth, WI-FI, радиоволны и др.). Дистанционно осуществляется не только управление механизмами подъема и поворота БПУ-1, но и включение электроспусков и ведения огня из КПВТ и ПКТ [1].
Для проверки работы устройства дистанционного управления башенной пулеметной установкой БПУ-1 бронетранспортера БТР-80 был разработан скетч для ардуино. Для того чтобы данное устройство определило среднее арифметическое между черным или белым сектором на диске (для точного определения угла поворота), необходимо вычислить значение которое называется серым [2].
Устройство дистанционного управления башенной пулеметной установкой бронетранспортера БТР-80 состоит (рис. 1): 1. датчики (оптопары), считывающие поворот башни; 2. датчики (оптопары), считывающие подъем люльки с пулеметами; 3. контроллер (ардуино); 4. драйвер двигателей; 5. электродвигатель поворота башни; 6. электродвигатель подъема люльки с пулеметами; 7. реле включения электроспуска; 8. реле замыкания электроспуска ПКТ; 9. реле замыкания электроспуска КПВТ; 10. реле включения камеры видео наблюдения установленной на прицеле; 11. реле включения ночного прицела; 12. модуль дистанционного управления; 13. бортовое питание на драйвер двигателя.
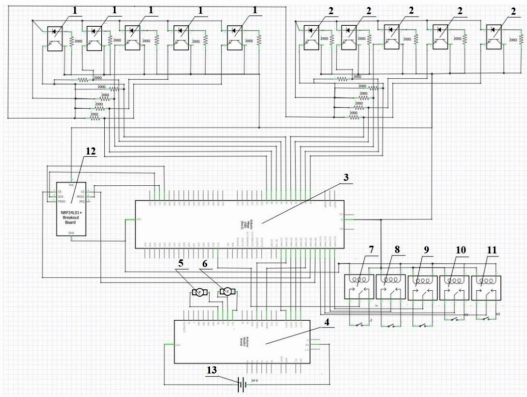
Рисунок 1. Схема устройство дистанционного управления башенной пулеметной установкой бронетранспортера БТР-80
Работает устройство следующим образом. При включении устройства запускается программа. В программе запускается программный код и в течение 10 секунд проводится калибровка устройства (прокручиваем шестеренку на черный сектор и через 5 секунд прокручиваем шестеренку на белый сектор, устройство узнает значение серого для данного периода времени). Далее, через пульт дистанционного управления, осуществляется подача сигнала на башенную пулеметную установку (БМ) (в программном коде указаны 2 режима работы: 1-ый режим – через кнопки пульта дистанционного управления, для точного наведения башенной пулеметной установки (БМ); 2-ой режим – управление джойстиком пульта дистанционного управления, для быстрого вращения башенной пулеметной установки (БМ)). В это же время оптопары считывают угол, на который должно повернуться или подняться орудие (ПКТ и КПВТ).
Для управления включения электроспусков, камеры видео наблюдения установленной на прицеле, а также замыкания электроспуска ПКТ и электроспуска КПВТ были добавлены реле, управляемые дистанционно, подключенные к пинам D22, D10, D11, D12 и D13.
Оптопары подключены через цепи выходов оптопар к аналоговым пинам ардуино. Применяется 5 оптопар для считывания углов поворота орудия и 5 оптопар для его подъема, ближайшая оптопара подключена к центру вращения А0 порта ардуино, а дальния к А9.
Драйвер двигателя использует пины D2 по D7 для вращения башенной пулеметной установкой (БМ) с разной скоростью, в зависимости от выбора режима на пульте дистанционного управления. Для вращения башенной пулеметной установкой (БМ) по почасовой стрелки на D2 пин подается максимальное напряжения (HIGH или 1), а на D4 пин минимальное напряжения (LOW или 0), для вращения против часовой стрелки меняем значения подачи напряжения на D2 и D4. Для управления скоростью вращения на пин D3 подается логическая единица. Для подъема орудия на D5 пин подается максимальное напряжения (HIGH или 1), а на D6 пин минимальное напряжения (LOW или 0), для опускания орудия меняем значение подачи напряжения на D5 и D6. Для управления скорости подъема орудия на пин D7 подается логическая единица [2].
Применение указанного технического решения позволит более точно наводить орудие и поражать цели с минимальным количеством выстрелов (переход с одного сектора на другой составляет 0.03125 градуса поворота башенной пулеметной установки (БМ), что составляет погрешность в 54 см на расстоянии 1000 метров), а также управлять дистанционно башенной пулеметной установкой (БМ) на расстоянии до 2000 метров, так как устройство имеет радио модуль.
