ОБЗОР МЕТОДОВ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРНО-ВЛАЖНОСТНОГО РЕЖИМА В ТЕХНОЛОГИЧЕСКОМ ПРОЦЕССЕ ИНКУБАЦИИ ЯИЦ
Конференция: LXXXII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Информатика, вычислительная техника и управление

LXXXII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»

ОБЗОР МЕТОДОВ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРНО-ВЛАЖНОСТНОГО РЕЖИМА В ТЕХНОЛОГИЧЕСКОМ ПРОЦЕССЕ ИНКУБАЦИИ ЯИЦ
REVIEW OF METHODS OF AUTOMATIC CONTROL OF TEMPERATURE AND HUMIDITY CONDITIONS IN THE TECHNOLOGICAL PROCESS OF EGG INCUBATION
Daniil Gorbov
Graduate student Belgorod State Technological University named after V.G. Shukhov, Russia, Belgorod
Аннотация. Для достижения высокой выводимости цыплят в инкубационных шкафах необходимо строгое соблюдение климатических условий. Ключевым параметром в этом процессе является температура воздуха, которая варьируется в зависимости от этапа инкубации. Для эффективной разработки микропроцессорной системы автоматического управления необходимым является анализ существующих методов стабилизации температурных режимов.
Abstract. To achieve high hatchability of chickens in incubators, strict adherence to climatic conditions is necessary. The key parameter in this process is the air temperature, which varies depending on the incubation stage. For the effective development of a microprocessor automatic control system, it is necessary to analyze existing methods for stabilizing temperature conditions.
Ключевые слова: инкубация, инкубационная машина, управление, ПИД-регулятор, нечеткий контроллер.
Keywords: incubation, incubation machine, control, PID controller, fuzzy controller.
Успех в промышленном птицеводстве во многом зависит от качества получаемых цыплят. Инкубация яиц представляет собой важный процесс, который позволяет получать молодняк птицы в любое время года и в нужном объеме. Разработка инкубаторов значительно упростила и ускорила организацию массового производства птицеводческой продукции, что, в свою очередь, способствует удовлетворению растущего спроса на мясо и яйцо птицы. Однако для достижения высокого процента вывода цыплят в инкубаторах необходимо строго соблюдать все технологические параметры, так как любые отклонения могут негативно сказаться на результате.
Одним из наиболее значительных факторов, влияющих на результаты инкубации, является температура воздуха [1]. Для успешного вывода цыплят температура должна находиться в диапазоне от 35,6 до 39,7°C на протяжении всего инкубационного периода. При этом важно отметить, что результаты вывода и качество молодняка значительно улучшаются при поддержании температуры близкой к среднему значению этого диапазона. Это связано с тем, что оптимальная температура способствует нормальному развитию эмбрионов и снижает риск возникновения различных патологий.
Важным аспектом инкубации является также уровень влажности. Негативное воздействие отклонения относительной влажности на результаты инкубации наблюдается, когда этот параметр остается ниже 40% или выше 70% на протяжении всего развития эмбрионов. Высокая влажность может привести к плесневению яиц, тогда как низкая влажность в начале инкубации вызывает значительные потери воды, что приводит к увеличению смертности зародышей.
Третий ключевой параметр — содержание углекислого газа. Если концентрация CO2 превышает 0,5% на протяжении всего инкубационного периода, это негативно сказывается на росте и развитии эмбрионов. Например, поддержание уровня СО2 на уровне 1% с первого дня инкубации снижает выводимость примерно на 15% (при контрольном уровне 0,3%). При 5% углекислого газа вероятность выживания эмбрионов стремится к нулю.
Для поддержания необходимых условий микроклимата в инкубаторе используются системы обогрева, охлаждения и увлажнения. Эффективное охлаждение достигается за счет открытия заслонок верхних и боковых отверстий инкубатора, а нагрев осуществляется с помощью электронагревателей. Для равномерного распределения температуры в инкубаторе работает вентилятор, который обеспечивает циркуляцию воздуха и предотвращает образование холодных зон. Увлажнение производится с помощью турбо увлажнителя, который распыляет холодную воду на лопасти вентилятора, что также способствует охлаждению. Для точного контроля температуры можно использовать несколько групп нагревателей. Однако для достижения высокой точности температурного режима требуется плавная регулировка напряжения на нагревателях, что возможно с использованием тиристоров в цепи питания.
При автоматизации поддержания температуры необходимо в программе контроллера разработать регулятор, который бы обеспечивал оптимальное регулирование процесса и его качество.
В настоящее время для поддержания температурного режима чаще всего используется обычный ПИД-регулятор [2], который позволяет осуществлять управление с относительно простой настройкой. ПИД-регулятор работает следующим образом: cигнал ошибки, представляющий собой разницу между заданным значением и текущей технологической величиной, поступает на вход ПИД-регулятора, где он обрабатывается для формирования управляющего сигнала. Этот сигнал определяется как сумма трех компонентов: пропорциональной, интегральной и дифференциальной части, при этом Kp, Ki и Kd представляют собой постоянные коэффициенты, соответствующие каждой из этих составляющих.

Рисунок 1. Схематическое проектирование процесса ПИД-регулирования
Системы с ПИД-регулированием имеет ряд преимуществ, которые обусловлены простотой реализации. Они обеспечивают надлежащий результат мониторинга для непрерывного процесса, но при рассмотрении процесса стабилизации температуры существует существенный недостаток, вызванный запаздыванием. Ещё одним важным фактором для рассмотренного регулятора является неизменяемость параметров объекта управления, т.е. в случае изменения внешних параметров среды, которые могут быть вызваны негерметичность дверей инкубационной машины необходима перенастройка параметров регулятора.
В связи с этим были разработаны альтернативные варианты регулирования – самонастраивающийся ПИД регулятор [3]. Цель системы - улучшить производительность и уменьшить колебаний температуры.
Методы нечеткого управления с использованием ПИД-регулятора сочетают в себе нечеткий регулятор и обычный ПИД-регулятор (рис. 2).
В структуру системы управления добавляется нечеткий регулятор, выходом которого являются параметры ПИД регулятора  . В данной структуре «e» является ошибкой системы, «ec» коэффициент изменения ошибки, которые являются входными данными нечеткого регулятора
. В данной структуре «e» является ошибкой системы, «ec» коэффициент изменения ошибки, которые являются входными данными нечеткого регулятора

Рисунок 2. Схематическое проектирование процесса нечеткого адаптивного ПИД-регулирования
Нечеткий контроллер использует алгоритм, который основан на нечетких множествах. При нечетком вычислении и достижении нелинейного интеллектуального управления системой используется нечеткая математика. Она использует практический опыт человека для сбора знаний и управления объектом.
Входные переменные нечеткой системы управления отображаются на множества функций принадлежности, называемыми «нечеткими множествами». Метод соединения четкого значения входа с нечетким значением известен как фаззификация [4]. Нечеткие множества определяют две входные переменные: (ошибка и изменение ошибки), а выходные переменные определены как температура в инкубаторе. Каждый из входных параметров разделены на семь нечетких множеств: (NB, NM, NS, ZO, PS, PM, PB) и семь функций принадлежности. В процессе дефаззификации мы получаем значения трёх параметров ПИД регулятора .
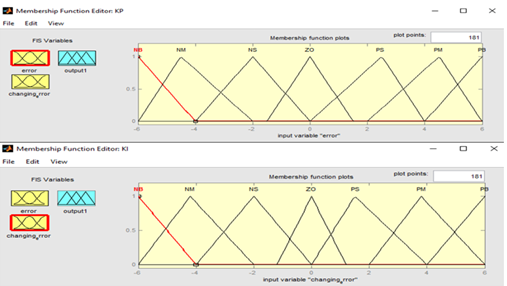
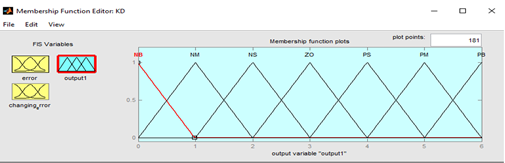
Рисунок 3. Функции принадлежности для переменных KP и KI, KD
Сравнительный анализ работы обычного ПИД регулятора и нечетного регулятора можно произвести в среде Matlab Simulink. На рисунке 4 показана блок схема, которая была разработана с параллельной структурой управления, включающая адаптивный ПИД регулятор и обычный ПИД регулятор [5].
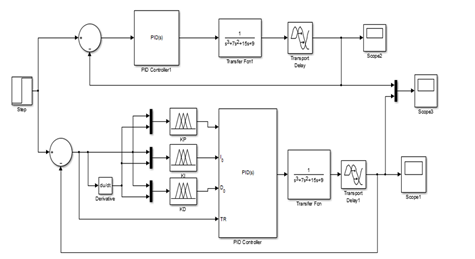
Рисунок 4. Блок схема стабилизации температуры
В представленной схеме на вход подается ступенчатое воздействие равное  . В выполнении нечеткой логики управления системой необходимо выбрать соответствующую ошибку "e" и изменяющую ошибку "ec". Когда системная ошибка "e' большая, то выброс велик и переходный процесс будет долгим. Когда "ec' большой, то увеличивается коэффициент Kd и выброс системы уменьшится, скорость отклика замедлится. Время моделирования составляет 20 секунд. На рисунке 5 показано сравнение работы двух параллельных регуляторов.
. В выполнении нечеткой логики управления системой необходимо выбрать соответствующую ошибку "e" и изменяющую ошибку "ec". Когда системная ошибка "e' большая, то выброс велик и переходный процесс будет долгим. Когда "ec' большой, то увеличивается коэффициент Kd и выброс системы уменьшится, скорость отклика замедлится. Время моделирования составляет 20 секунд. На рисунке 5 показано сравнение работы двух параллельных регуляторов.
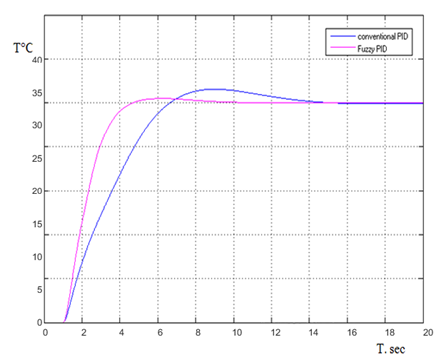
Рисунок 5. Переходная характеристика обычного ПИД-регулятора и нечеткого ПИД-регулятора
Анализируя получившиеся графики, можно сделать вывод, что нечеткий адаптивный ПИД-регулятор температуры обеспечивает меньшее время нарастания, времени стабилизации и выбросы по сравнению с обычным ПИД-регулятором.
Недостатком нечетких логических контроллеров выступает его сложность для изучения. Однако, результат исследований [6] показывает, что предложенный контроллер достигает выдающихся характеристики для повышения точности управления температурой.
Таким образом, разработка регуляторов для поддержания температурно-влажностных режимов является актуальной задачей в контексте современных технологий управления технологическим процессом инкубации яиц. Эффективное поддержание заданных параметров температуры, влажности и содержания углекислого газа критически важно для обеспечения оптимальных условий инкубации. В этом контексте микропроцессорная система управления представляет собой надежное решение, способное обеспечить высокую точность и стабильность параметров.
