Структурный и кинематический анализ кривошипно-ползунного механизма
Конференция: VIII Международная научно-практическая конференция "Научный форум: технические и физико-математические науки"
Секция: Машиностроение и машиноведение

VIII Международная научно-практическая конференция "Научный форум: технические и физико-математические науки"

Структурный и кинематический анализ кривошипно-ползунного механизма
STRUCTURAL AND KINEMATICAL ANALYSIS KROVOSHIPNO-SOLUBLE MECHANISM
Oleg Pavlov
associate professor of the Leninogorsk Branch of the FGBOU IN THE KNITU them A.N. Tupolev – KAI, Russia, the Republic of Tatarstan, Bugulma
Аннотация. Статья посвящена методике проведения практических занятий по анализу механизмов различного типа со студентами машиностроительного профиля. Рассмотрен пример проведения структурного и кинематического анализа кривошипно-ползунного механизма с подробным описанием методики выполнения домашних заданий по учебной дисциплине «Теория механизмов и машин». Методика предполагает повышение практических навыков обучающихся, прежде всего за счет индивидуализации обучения.
Ключевые слова: механизм; структура; кинематика; анализ; звено; пара; цепь; скорость; ускорение.
Кинематическую основу любой машины составляют механизмы, предназначенные для преобразования заданного движения входному (ведущему) звену в требуемые движения остальных звеньев, как правило, с изменением скоростей и ускорений [1].
Одной из основных задач учебной дисциплины «Теория механизмов и машин» является производство структурного и кинематического анализа механизмов. В процессе обучения студентов качественному выполнению данной процедуры приходится сталкиваться с недостаточным количеством учебного времени, особенно при заочном и очно-заочном обучении. Для повышения эффективности получения студентами практических навыков анализа работы различных типов механизмов предлагается выдавать им в качестве домашних индивидуальных заданий выполнение структурного и кинематического анализа механизма по схеме, предложенной ниже для кривошипно-ползунного механизма с учетом рекомендаций авторов [1].
Структурный анализ механизма. Структурная схема, исходные данные и общий анализ механизма.
Исходные данные:
- начальное положение ведущего звена кривошипа φ1 = 45°;
- размеры звеньев: ℓОА = 0,05 м; ℓАВ = 0,20 м.
- частота вращения ведущего звена n = 765 об/мин.
Структурная схема механизма представлена на рисунке 1. На ней указаны неподвижное звено (стойка), подвижные звенья, заглавными латинскими буквами обозначены центры вращения кинематических пар, входное звено и направление его движения. Звенья на схеме обозначим арабскими цифрами 1, 2, 3, 4, начиная с входного (ведущего) звена.
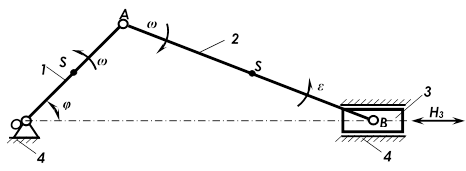
Рисунок 1. Схема кривошипно-ползунного механизма
Определение числа звеньев, кинематических пар и их характеристика
Данный механизм включает четыре звена [2].
Звено 1 – кривошип, который совершает полнооборотное вращательное движение.
Звено 2 – шатун-звено, совершающее сложное плоскопараллельное движение и образующие кинематические пары только с подвижными звеньями.
Звено 3 – ползун, совершает возвратно-поступательное движение.
Звено 4 – стойка, неподвижна.
Число подвижных звеньев n = 3.
Кинематические пары (КП), образуемые звеньями [2]:
4 - 1 ("0") – вращательная, одноподвижная, низшая;
1 - 2 ("А") – вращательная, одноподвижная, низшая;
2 - 3 ("В") – вращательная, одноподвижная, низшая;
3 – 4 ("Н34") – поступательная, одноподвижная, низшая.
Всего кинематических пар 4 и все КП одноподвижные, т.е. р1 =4.
Двухподвижных КП нет, т.е. р2 = 0[2].
Определение числа степеней свободы механизма
Для плоского механизма
W = 3n – 2p1 – 1p1 = 3 · 3 – 2 · 4 – 1 · 0 = 1.
W = 1 означает, что достаточно задать движение одному подвижному звену и все звенья получат движение.
Анализ принципа образования механизма
В состав механизма входят две структурные группы:
а) группа начальных звеньев, состоящая из звеньев 1 и 4 с одной вращательной кинематической парой "0" (рисунок 2 а).
Степень подвижности группы
W1 = 3n – 2p1 = 3 · 1 – 2 · 1 = 1;
б) группа с нулевой степенью подвижности (группа Ассура), состоящая из звеньев 2 и 3 и трех кинематических пар "А", "В" - вращательные;
"Н34" - поступательная (рисунок 2б). Степень подвижности группы
W' = 3n – 2p1 = 3 · 2 – 2 · 3 = 0.

Рисунок 2 (а, б) Структурные группы механизма
Таким образом, механизм образован последовательным присоединением к группе начальных звеньев с W = 1 одной двухповодковой группы (диады) Ассура с W = 0 и является механизмом 1 класса 2-го порядка.
Перейдем к кинематическому анализу механизма Построение плана механизма в 6 – 8 положениях (через 45º или 60º)
Исходные данные: ℓОА = 0,05 м; ℓАВ = 0,20 м.
Из условия размещения плана на листе выбирается масштабный коэффициент длины звеньев, например, по звену ОА
Кℓ = ![]() ,
,
где ![]() – длина отрезка, изображающего длину звена на плане.
– длина отрезка, изображающего длину звена на плане.
С учетом Кℓ = 0,002 м/мм длина звена АВ на плане:
![]() =
= ![]() =
= ![]() = 100 мм.
= 100 мм.
В выбранном масштабе вычерчиваются планы механизма (рисунок 3).
Из точки "O" проводится окружность радиусом ОА – траектория движения точки "А", которая делится на 8 равных частей (через 45°), восемь положений кривошипа и горизонтальная линия – траектория движения точки "В".
Точки А нумеруются от 1 до 8 в направлении вращения. Из каждой точки А1…А8 на горизонтальной линии, проведённой из точки О отмечаются места положения ползуна В1…В8 отсекая их дугой окружности радиусом ![]() . На середине каждого отрезка АnВn отмечается точка положения центра масс шатуна S1… S8. Соединение этих точек позволяет получить фигуру в виде овала, которая соответствует траектории движения центра масс шатуна S2.
. На середине каждого отрезка АnВn отмечается точка положения центра масс шатуна S1… S8. Соединение этих точек позволяет получить фигуру в виде овала, которая соответствует траектории движения центра масс шатуна S2.
Траектория движения центра масс шатуна (точки S2) и характеристика траекторий движения точек А, В.
По планам механизма (рисунок 3) получена траектория движения центра масс шатуна, которая представляет собой эллипс. Траектория движения точки "А" – окружность, точки "В" (ползуна) – прямая линия. Ползун является рабочим органом, совершает возвратно-поступательное движение из одного крайнего положения в другое (имеет две мертвые точки).

Рисунок 3. Планы положений механизма
Кинематическая схема механизма в заданном положении
Исходные данные: φ1 = 45°; ℓОА = 0,05 м; ℓАВ = 0,20 м;
n1 = 765 об/мин или угловая скорость вращения кривошипа
ω1 = ![]() =
= ![]() = 80 рад/с.
= 80 рад/с.
В принятом масштабе Кℓ= 0,002 м/мм кинематическая схема механизма (план механизма) при φ1 = 45° для анализа изображена на рисунке 4. Планы скоростей (рисунок 5) и ускорений (рисунок 6) построить на том же листе.
Рассмотрим определение линейной скорости точек А, В; угловой скорости шатунa и их направления
Линейные скорости точек υί механизма определяются из плана скоростей, который строится из полюса плана в масштабе Кυ = ![]() , где
, где ![]() - длина отрезка в мм, изображающая скорость точки υί на плане. Скорость точки А: υА = ω1 ℓОА = 80 · 0,05 = 4 м/с. Вектор
- длина отрезка в мм, изображающая скорость точки υί на плане. Скорость точки А: υА = ω1 ℓОА = 80 · 0,05 = 4 м/с. Вектор ![]() А приложен в точке А перпендикулярно звену 1 и направлен в сторону его вращения. Принимаем масштабный коэффициент скорости Кυ = 0,1
А приложен в точке А перпендикулярно звену 1 и направлен в сторону его вращения. Принимаем масштабный коэффициент скорости Кυ = 0,1 ![]() . На плане скорость
. На плане скорость ![]() А изображается отрезком
А изображается отрезком![]() =
= ![]() =
= ![]() = 40 мм, отложенным из полюса плана рυ (рисунок 5). Скорость неподвижной точки О равна нулю. Для определения скорости точки В используем векторное уравнение
= 40 мм, отложенным из полюса плана рυ (рисунок 5). Скорость неподвижной точки О равна нулю. Для определения скорости точки В используем векторное уравнение
![]() (1)
(1)
где ![]() - относительная скорость точки В при вращении вокруг точки А, направлена перпендикулярно звену ВА. С учетом этого
- относительная скорость точки В при вращении вокруг точки А, направлена перпендикулярно звену ВА. С учетом этого
![]() =
= ![]() +
+ ![]() (2)
(2)
||ОВ ![]() АО
АО![]() ВА.
ВА.
Векторное уравнение (2) с двумя неизвестными величинами ![]() и
и ![]() решается путем построения плана скоростей.
решается путем построения плана скоростей.
Построение плана скоростей производится в следующей последовательности.
Из произвольно выбранного полюса рυ (рисунок 5) откладываем отрезок ![]() = 40 мм перпендикулярно звену АО, в направлении вращения. Из полюса рυ проводится направление вектора
= 40 мм перпендикулярно звену АО, в направлении вращения. Из полюса рυ проводится направление вектора![]() параллельно ОВ, а из точки "а" (конца вектора
параллельно ОВ, а из точки "а" (конца вектора ![]() ) проводится направление вектора
) проводится направление вектора ![]() перпендикулярно ВА до пересечения с направлением вектора
перпендикулярно ВА до пересечения с направлением вектора ![]() . Пересечение направлений дает точку "в" – конец векторов
. Пересечение направлений дает точку "в" – конец векторов ![]() и
и ![]() . Измерив по плану отрезки
. Измерив по плану отрезки ![]() и
и ![]() в мм получим:
в мм получим:
υВ = Кυ·![]() = 0,1 · 34 = 3,4 м/с;
= 0,1 · 34 = 3,4 м/с;
υВА = Кυ·![]() = 0,1 · 29 = 2,9 м/с.
= 0,1 · 29 = 2,9 м/с.
Величину угловой скорости шатуна определяем по формуле:
ω2 = υВА/ℓАВ = 2,9/0,2 = 14,5 рад/с;
Для определения направления угловой скорости ω2 переносим вектор относительной линейной скорости ![]() в точку В плана механизма (рисунок 4) и укажем их направление.
в точку В плана механизма (рисунок 4) и укажем их направление.

Рисунок 4. Кинематическая схема механизма
Определение линейного ускорения точек А, В; углового ускорения шатуна и их направления
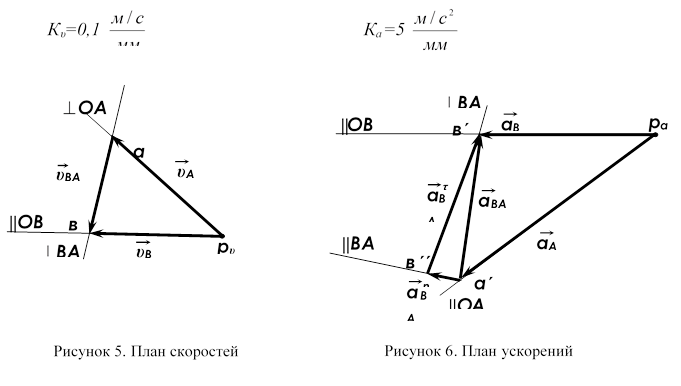
Линейные ускорения характерных точек механизмов (А, В) определяются из плана ускорений, который строится в выбранном масштабе.
Так как звено 1 (ОА) вращается равномерно (ω1 = 80 рад/с = const), то точка А имеет только нормальное ускорение
аА = ![]() =
= ![]() · ℓОА = 802 · 0,05 = 320 м/с2.
· ℓОА = 802 · 0,05 = 320 м/с2.
Принимаем масштабный коэффициент ускорения Ка = 5 ![]() .
.
Вектор ![]() приложен в точке А и направлен вдоль звена АО к центру вращения в точке О. На плане ускорений ускорение
приложен в точке А и направлен вдоль звена АО к центру вращения в точке О. На плане ускорений ускорение ![]() изображается отрезком
изображается отрезком ![]() ´ =
´ = ![]() =
= ![]() = 64 мм, отложенным из полюса плана ра (рисунок 6).
= 64 мм, отложенным из полюса плана ра (рисунок 6).
План ускорений строится по аналогии с планом скоростей, с использованием векторного уравнения:
![]() =
= ![]() +
+ ![]() =
= ![]() +
+ ![]() +
+ ![]() ,
,
где ![]() || ОВ;
|| ОВ; ![]() || ОА;
|| ОА; ![]() || ВА;
|| ВА; ![]()
![]() ВА.
ВА.
Нормальная составляющая ![]() равна:
равна:
![]() =
= ![]() = 14,5 · 0,2 = 42 м/с2
= 14,5 · 0,2 = 42 м/с2
и направлена вдоль линии ВА к центру вращения в точке А.
В масштабе Ка = 5 (м/с2) / мм отрезок, изображающий нормальное ускорение ![]() , на плане представлен:
, на плане представлен: ![]() =
= ![]() =
= ![]() = 8,4 мм.
= 8,4 мм.
Согласно векторному уравнению из точки В´´ проводится линия действия тангенциальной составляющей относительного ускорения ![]() перпендикулярно линии ВА, а из полюса ра – линия действия абсолютного ускорения точки В параллельно линии ОВ. Точка пересечения этих линий В´ определяет вектор ускорения
перпендикулярно линии ВА, а из полюса ра – линия действия абсолютного ускорения точки В параллельно линии ОВ. Точка пересечения этих линий В´ определяет вектор ускорения ![]() .
.
Измерив по плану ускорений соответствующие отрезки, получим:
аВ = Ка · ![]() = 5 · 46 = 230 м/с2;
= 5 · 46 = 230 м/с2;
![]() = Ка ·
= Ка · ![]() = 5 · 45 = 225 м/с2.
= 5 · 45 = 225 м/с2.
Величина углового ускорения звена 2 определяется по формуле:
ε2 = ![]() =
= ![]() = 1125 рад/с2.
= 1125 рад/с2.
Для определения направления углового ускорения звена 2 переносим вектор касательной составляющей ускорения ![]() в точку В плана механизма (рисунок 4) и укажем их направление.
в точку В плана механизма (рисунок 4) и укажем их направление.
В результате структурно-кинематического анализа кривошипно-ползунного механизма в заданном положении φ = 45° установлено:
1. Механизм имеет одну степень подвижности.
2. Траекториями движения характерных точек являются: точки А (кривошипа) – окружность; точки В – прямая линия.
3. Звено 1 (кривошип) движется равномерно-вращательно, звено 2 (шатун) совершает сложное плоскопараллельное равнозамедленное движение, звено (3) – ползун совершает возвратно-поступательное равноускоренное движение.
Данный механизм может найти применение в поршневых машинах (двигателях внутреннего сгорания, компрессорах, насосах, прессах и т.д.).
Разработка индивидуальных заданий, а также проверка выполнения домашних работ осуществляется преподавателем, и результаты учитываются в виде дополнительных баллов, выставляемых студентам в процессе промежуточной аттестации, о чем они предварительно оповещаются.
Список литературы:
1. Артоболевский И.И. Теория механизмов и машин. М.: Наука, 1988.
2. Павлов О.Ю. Механика. Учебное наглядное пособие. Лениногорск, 2014.
