РАЗРАБОТКА ОТЕЧЕСТВЕННОГО КОНТРОЛЛЕРА ИНДУКЦИОННЫХ ПЕТЕЛЬ
Конференция: XCV Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Информатика, вычислительная техника и управление

XCV Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»

РАЗРАБОТКА ОТЕЧЕСТВЕННОГО КОНТРОЛЛЕРА ИНДУКЦИОННЫХ ПЕТЕЛЬ
DEVELOPMENT OF A DOMESTIC INDUCTION LOOP CONTROLLER
Konshina Arina Aleksandrovna
Student, National Research University "MIET", Russia, Zelenograd
Аннотация. В статье рассматривается проблема нестабильной работы имеющихся контроллеров индукционных петель в связи с дрейфом параметров колебательного контура. Проведен сравнительный анализ промышленных контроллеров VEK M1H и DoorHan Loop-1 и выявлены ключевые недостатки. На основе анализа разработан собственный отечественный контроллер индукционных петель со встроенным BLE-интерфейсом для беспроводной диагностики параметров петли.
Abstract. The article discusses the problem of unstable operation of existing induction loop controllers due to the drift of the oscillating circuit parameters. A comparative analysis of the VEK M1H and DoorHan Loop-1 industrial controllers has been conducted, and key disadvantages have been identified. Based on this analysis, a domestic induction loop controller with a built-in BLE interface for wireless loop parameter diagnostics has been developed.
Ключевые слова: индукционная петля, контроллер, частотный диапазон, BLE-модуль, помехоустойчивость.
Keywords: induction loop, controller, frequency range, BLE module, noise immunity.
1. Введение
Еще век назад доступ на закрытые парковки осуществлялся преимущественно ручным трудом сотрудников службы охраны, открывавших шлагбаумы. Со временем такой способ сменился специальными пультами дистанционного управления, позволяющие сократить временные затраты на въезд. Сейчас, с развитием автоматизации и цифровых технологий, шлагбаумы функционируют в автоматическом режиме. Вариаций технологических решений на рынке колоссальное количество: шлагбаумы с видеодетекцией, температурными датчиками, с индукционными петлями и пр.
Из представляемых вариантов, благодаря простоте и долговечности, лидирующее место сохраняют индукционные петли [8]. Однако их надежность и работоспособность зависит от управляющего устройства (УУ) – контроллера индукционных петель.
Основная проблема традиционных контроллеров заключается в возможной нестабильной работе в связи с дрейфом параметров колебательного контура, вызванных внешними воздействиями: повышенная влага на дорожном покрытии или скопление воды в щелях асфальта, увеличивает сопротивления контура, в связи с чем снижается добротность резонансного контура. Рекомендуемый коэффициент добротности (Q) равен [1]:

В связи с имеющейся проблемой, вытекают ложные срабатывания шлагбаумов
Важной задачей в данной работе является разработка контроллера, способного компенсировать дрейф параметров колебательного контура и распознавать габариты транспортных средств для безопасного проезда.
2. Принципы работы индукционных петель
Принцип работы данных детекторов основан на изменении индуктивности петли. Кабель монтируется внутри дорожного покрытия и подключается к контроллеру, образуя колебательный контур с резонансной частотой:

В самой замкнутой рамке течет переменный ток, создавая магнитное поле. По правилу Ленца, переменное магнитное поле вихревых токов старается противодействовать изменениям магнитного потока, которое индуктирует вихревые токи [4]. Автомобиль наезжает на петлю и линии поля отклоняются, уменьшая индуктивность (![]()
 ) и повышая частоту (
) и повышая частоту ( ). В такой момент петля активирована, что позволяет контроллеру обнаружить транспортное средство и подать сигнал на поднятие стрелы шлагбаума. Данная система удобна тем, что она не распознает людей, животных и средства индивидуальной мобильности (самокаты, велосипеды) [3].
). В такой момент петля активирована, что позволяет контроллеру обнаружить транспортное средство и подать сигнал на поднятие стрелы шлагбаума. Данная система удобна тем, что она не распознает людей, животных и средства индивидуальной мобильности (самокаты, велосипеды) [3].
3. Сравнительный анализ промышленных контроллеров
Перед разработкой собственного решения контроллера индукционных петель, необходимо изучить рынок уже предлагаемых вариантов, сравнить их и провести эксперименты, выявив как сильные, так и слабые стороны. Для сравнения были взяты два одноканальных детектора индукционных петель: FEIG VEK M1H1 компании FEIG ELECTRONIC (Германия) и DoorHan Loop-1 от компании DoorHan (Китай).
Контроллер VEK M1H представляет собой одноканальное устройство детектирования, выполненное на основе частотного метода измерения параметров колебательного контура. Диапазон поддерживаемых индуктивностей подключаемой петли составляет от 25 до 800 мкГн, что обеспечивает универсальность применения устройства для любых типов индуктивных датчиков, независимо от их геометрических размеров, количества витков и условий монтажа. Широкий диапазон индуктивностей исключает необходимость предварительного согласования параметров петли и контроллера, что существенно упрощает проектирование системы и снижает требования к точности изготовления петли [9].
Диапазон рабочих частот контроллера составляет 30–130 кГц. Наличие возможности выбора рабочей частоты (две ступени) позволяет адаптировать устройство к конкретным условиям эксплуатации. Во-первых, благодаря данной функции появляется критическое значение при одновременной установке нескольких детекторов в ограниченном пространстве, по причине возможности назначения различные частоты соседним устройствам, что минимизирует эффект перекрестных наводок и исключает взаимные ложные срабатывания.
Также данное устройство имеют важную эксплуатационную характеристику, а именно наличие четырёх фиксированных уровней чувствительности, которые задаются в качестве относительного изменения индуктивности петли  в диапазоне от 0,01 % до 0,65 %. Градация чувствительности позволяет детектору адаптироваться к различным типам транспортных средств, обеспечивая надёжное детектирование как мотоциклов и малолитражных автомобилей (при повышенной чувствительности), так и крупногабаритного грузового транспорта (при пониженной чувствительности, что также повышает помехоустойчивость системы).
в диапазоне от 0,01 % до 0,65 %. Градация чувствительности позволяет детектору адаптироваться к различным типам транспортных средств, обеспечивая надёжное детектирование как мотоциклов и малолитражных автомобилей (при повышенной чувствительности), так и крупногабаритного грузового транспорта (при пониженной чувствительности, что также повышает помехоустойчивость системы).
Однако, несмотря на плюсы, у VEK M1H есть и недостатки:
- Например, чувствительность имеет только 4 ступени в диапазоне (0.01%, 0.04%, 0.16%, 0.64%), соответственно приходится вместо необходимой чувствительности, например, 0.02%, выбирать либо недостаточную 0.01%, либо избыточную 0.04%. Такой недостаток влияет на возможное появление ложных срабатываний, или на пропуск не предусмотренных пользователем транспортных средств;
- состояние петли можно отследить только по индикации светодиодов. Это является минусом, так как нет возможности снять текущие значения и распознать неисправность петли или контроллера;
- настройки выполняются только DIP-переключателями. Для изменения параметров или обновления прошивки контроллера, требуется физическое присутствие на объекте, а если таких устройств много, то это займет не один час.
Теперь рассмотрим контроллер DoorHan Loop-1. Он также представляет собой одноканальный индукционный детектор, предназначенный для использования в системах автоматизации шлагбаумов, ворот и парковочных комплексов. Устройство относится к решениям базового уровня и ориентировано на эксплуатацию в стандартных условиях, не требующих высокой точности детектирования и расширенных функциональных возможностей.
Настройка параметров контроллера осуществляется аппаратным способом с использованием DIP-переключателей [1].
Основные функциональные возможности контроллера включают:
- выбор рабочей частоты генератора;
- ступенчатую регулировку чувствительности (четыре фиксированных уровня);
- включение фильтра подавления электромагнитных помех;
- настройку режима работы выходного реле;
- задание режима таймера присутствия (непрерывное детектирование или фиксированная задержка длительностью 10 минут).
При подаче питания осуществляется автоматическая калибровка длительностью около 1 секунды, в ходе которой контроллер адаптируется к параметрам подключенной индуктивной петли. Индикация состояния реализована с помощью двух светодиодов: красный сигнализирует о наличии питания, зеленый — о состоянии канала и возможных ошибках.
Однако же, несмотря на простоту и удобство применения, конструктивные особенности контроллера обуславливают ряд ограничений, влияющих на надежность его функционирования в сложных условиях эксплуатации. В частности, отсутствует возможность динамической подстройки частоты: калибровка выполняется только при включении питания, что исключает компенсацию изменений параметров контура, вызванных температурными и влажностными колебаниями или старением материалов. Это может приводить к снижению точности детектирования и возникновению ложных срабатываний.
Во-вторых, регулировка чувствительности носит дискретный характер, что затрудняет точную настройку порога срабатывания, особенно при обнаружении объектов с малой металлической массой (например, мотоциклов). И также, как и в VEK M1H. диагностика возможна исключительно по светодиодной индикации, что не позволяет точно определить характер неисправностей (обрыв, короткое замыкание) без применения дополнительных измерительных средств.
А во время калибровки чувствительность к внешним воздействиям повышается. Таким образом, наличие транспортного средства в зоне петли или сильные электромагнитные помехи в момент включения питания могут быть зафиксированы как базовое состояние, что приводит к некорректной работе устройства.
Стоит учесть, что не предусмотрены цифровые интерфейсы, в связи с чем исключается возможность удаленного мониторинга или настройки в системы управления, а изменение алгоритмов работы и обновление прошивки вовсе не поддерживаются.
4. Разработка собственного решения
На основе проведенного анализа сформулируем требования к разрабатываемому контроллеру:
-
частотный принцип детектирования с измерением относительного изменения частоты
 ;
; - автоматическая подстройка частоты для компенсации дрейфа;
- блокировка калибровки, если петля занята;
- BLE-интерфейс для удаленной настройки и диагностики контроллера;
- отображение графиков частоты, статуса петли в реальном времени.
На рисунке 1 представлена структурная схема разработанного контроллера. От петли на микроконтроллер через трансформатор поступает сигнал, он управляет генератором возбуждения, образуя алгоритм автоматической подстройки частоты, а также этот сигнал взаимодействует с BLE-модулем и формирует сигналы на реле и светодиоды.

Рисунок 1. Структурная схема разработанного контроллера индукционных петель
5. Моделирование и схемотехническая реализация
Разработка началась с построения электрической модели измерительного тракта в программе Multisim. После успешной проверки модели была создана принципиальная схема в Altium Designer.
На рисунке 2 представлен фрагмент собранной модели, имитирующий работу преобразования сигнала с индукционной петли в цифровые импульсы для микроконтроллера [7].
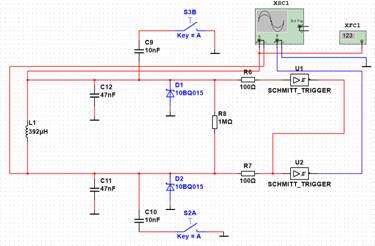
Рисунок 2. Модель измерительного тракта
Сигнал с петли (L1) проходит через фильтры на конденсаторах C9, C10, C11, C12. Эти конденсаторы подавляют высокочастотные помехи и сглаживают форму сигнала. Диоды D1 и D2 ограничивают амплитуду, не допуская превышений. Резисторы R6 и R7 ограничивают ток, а резистор R8 образует нагрузку, стабилизируя работу.
Дальше сигнал поступает на входы триггеров U1 и U2, они называются триггерами Шмитта. Встроенный в них гистерезис, то есть разница между верхним и нижним порогом срабатывания, позволяет не реагировать на мелкие шумы, формируя прямоугольные импульсы на выходе. Частота этих импульсов равна частоте колебаний в петле, и они доходят до микроконтроллера, чтобы измерить частоту [6].
В моделировании Multisim воспроизведены реальные условия эксплуатации. При изменении частоты колебаний петли в диапазоне 25–130 кГц (рабочий диапазон контроллера) на выходах триггеров U1 и U2 формировался устойчивый прямоугольный сигнал (меандр) без сбоев и искажений (рисунок 3).
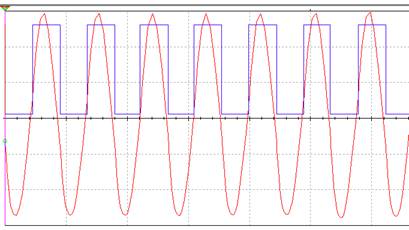
Рисунок 3. Прямоугольный сигнал на выходе триггеров
После проверки модели в Multisim, схема была перенесена в программу Altium Designer.
Схема устройства включает несколько функциональных узлов: входной измерительный тракт, автогенератор на основе логических элементов, микроконтроллер с поддержкой беспроводной связи, а также узлы питания и индикации (рисунок 4, а).
Входной каскад реализован с использованием защитных элементов, включая TVS-диоды, предназначенные для защиты от импульсных перенапряжений. Также применены фильтрующие RC-цепи, обеспечивающие подавление высокочастотных помех, поступающих с индуктивной петли. Сигнал с петли поступает на автогенератор, что обеспечивает формирование устойчивых колебаний и повышение помехоустойчивости за счет триггера Шмитта.
Цифровая обработка сигнала осуществляется с использованием микроконтроллера, который обеспечивает обработку входных данных, формирование управляющих сигналов и передачу информации по беспроводному интерфейсу. Для обеспечения стабильной работы микроконтроллера предусмотрены кварцевые резонаторы, а также цепи развязки питания [2].
Компоновка элементов выполнена с учётом функционального разделения устройства. Аналоговая часть (измерительный тракт и автогенератор) размещена в отдельной зоне, удалённой от цифровых узлов (микроконтроллера и BLE-модуля), что позволило снизить уровень взаимных помех и повысить точность измерений (рисунок 4, б).
|
|
|
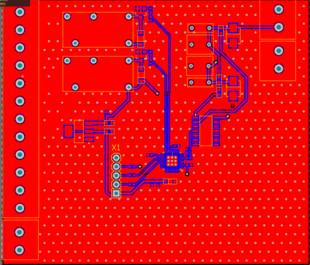
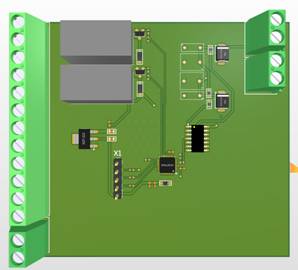
Рисунок 4. Модели платы, выполненные в среде Altium Designer:
а) 2-D режим; б) 3-D режим
6. Разработка мобильного приложения
Важной особенностью данного контроллера является наличие встроенного Bluetooth интерфейса, обеспечивающего беспроводное взаимодействие с мобильным приложением. Такая функция дает возможность проверять состояние оборудования, осуществлять настройку удаленно [5].
После установления соединения телефона с контроллером в приложении отображается состояние подключенного устройства:
- статус петли (занята / свободна/ калибровка);
-
значение относительного изменения частоты ;
- график изменения частоты в реальном времени.
И главным преимуществом приложения является возможность изменять параметры контроллера, не имея доступ к DIP-переключателям:
- регулировка чувствительности в процентах от порогового значения;
- режим работы реле;
- изменение времени рекалибровки.
В качестве языка программирования был выбран C++, благодаря объектно-ориентированному подходу, низкоуровневому доступу к железу и одновременно написанию сложных алгоритмов. На рисунке 5 представлено реализованное приложение:
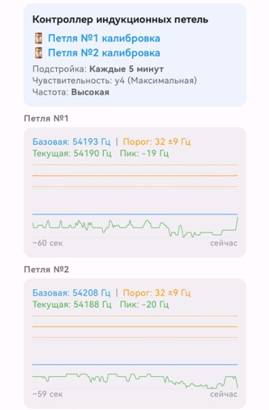
Рисунок 5. Приложение для отслеживания состояния контроллера
7. Вывод
В результате выполнения работы был разработан контроллер индукционных петель с расширенными возможностями диагностики. Анализ существующих промышленных контроллеров VEK M1H и DoorHan Loop-1 показал основные ключевые недостатки: отсутствие автоподстройки частотных параметров, невозможность удаленной настройки.
Разработанный контроллер исключает недостатки и имеет алгоритм автоматический подстройки частоты, блокировку возможности калибровки при занятой петле, а также BLE-интерфейс для беспроводной диагностики и настройки.
