Разработка аппаратно-программного комплекса управления для проведения поисковых и мониторинговых операций при отсутствии визуального контакта с исследуемым объектом, а также для картографирования в условиях ограниченной видимости
Журнал: Научный журнал «Студенческий форум» выпуск №18(18)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №18(18)
Разработка аппаратно-программного комплекса управления для проведения поисковых и мониторинговых операций при отсутствии визуального контакта с исследуемым объектом, а также для картографирования в условиях ограниченной видимости
Раздел посвящён проблеме проведения поисковых и мониторинговых операций в условиях ограниченного визуального контакта с объектом, находящимся в сильно загрязненной (замутненной) среде и в условиях сильного задымления, а также при решении вопросов картографирования поверхностей протяженных объектов (трубопроводы, кабель каналы, опорные элементы гидротехнических сооружений и т.д.), расположенных на глубинах до 12 м. Особенно актуальной задача является при проведении поисковых работ с использованием малогабаритных надводных аппаратов с возможностью зависания в точке позиционирования при решении задач по поиску затопленных объектов криминального характера и при возникновении чрезвычайных ситуаций (ЧС), связанных с затоплением значительных территорий, а также в случаях когда поиск и идентификация обследуемых предметов связанно с ограниченным временным интервалом.
Основой функционирования БКУ является программное обеспечение, алгоритмы которой основаны на применении теории графов для плоских задач. В ходе исследования первоначально был определен состав бортового и берегового комплекса управления, на основе которого планируется совершенствовать первоначальный программный пакет с постепенным внедрением элементов искусственного интеллекта, предназначенного решать задачи, связанные с идентификацией обследуемых объектов.
При проведении поисковых операций в большинстве случаем дело приходится иметь с объектами, геометрические размеры которых незначительны - максимальные линейные размеры не превышают 1 м., а общая площадь менее 0,01 кв.м. Определение расположения объекта на плоскости и его ориентация в пространстве являются в этом случае целями поиска. Предметы также могут быть разнородны по своему составу, т.е. отражательная способность в различных диапазон электромагнитных волн у разных частей одного предмета также неодинакова.
Поэтому в условиях ограниченной видимости измерения целесообразно проводить с использованием достаточно широкого диапазона электромагнитного излучения, в том числе и не исключая оптический. В таких условиях бортовому комплексу достаточно сложно в условиях ограниченного времени однозначно определить соответствие объекта предмету поиска, поскольку интеллектуальной системе необходимо анализировать сразу все источники информации. Кроме того на БКУ возложена задача расчета дальнейшего маршрута движения, вектор которого, в свою очередь определяется результатами проведенных измерений.
Шаг поиска в случае использования оптических систем, определяется прежде всего техническими параметрами поисковой системы, когда соотношение параметров фокусного расстояния и угла раствора поля зрения не позволяют получить поле сканирования меньше минимального линейного размера разыскиваемого объекта.
В общем случае базовый алгоритм функционирования на основе теории графов, реализованный для поисковых задач с использованием НПК "БЛИК" в настоящий момент можно разделить на три основных типа:
- матричный (галсовый, замкнутый, "шахматный" (рисунок 1)

Рисунок 1. Виды матричного способа поиска
- радиальный (замкнутый, сегментный (рисунок 2))
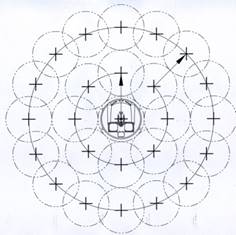
Рисунок 2. Радиальный способ поиска
- комбинированный (комбинация всех перечисленных видов (рисунок 3))

Рисунок 3. Комбинированный способ поиска
Вся поисковая операция разделяется на несколько основных этапов:
1. Определение среднего расстояния видимости в воде на предполагаемой глубине фото- видеосъёмки. Производятся с целью определения параметра h – расстояния от условной линии дна до плоскости визирования. Для этого производятся пробные съёмки дна в нескольких точках и по определённым критериям определяется расстояние удовлетворительной видимости, при которой качество полученных видеоматериалов позволяют объективно оценивать состояние дна и идентифицировать находящиеся на нём объекты. Полученный при этом параметр h заносится в компьютер и служит для вычисления других параметров пеленгации.
2. Определение шага пеленгации Δ. Этот параметр характеризует расстояние, между двумя соседними точками пеленгации и определяется расчетным путём:
Δ = 2*h*tg α
где α=φ/2, φ – угол обзора видеокамеры, град.,
т.е.
. Δ = 2*h*tg( φ/2)
3. Определение величины перехода L и количество галсов n (в зависимости от технических характеристик оборудования). В большинстве случаев – направление переходов совершается по кратчайшему расстоянию водоёма (поперек реки), а направление галсов по более протяжённому (вдоль реки). В идеальном случае шаг галса равен Δ, тогда в этом случае изображения межгалсовых переходов будут получены без пересекаемых областей.
Таким образом, в настоящий момент работа вплотную подошла к решению задачи использования системы управления с элементами искусственного интеллекта для получения возможности определения положения объекта в воде не только на плоскости, но и в пространстве и его идентификации на основе исходных геометрических образов.
Опытная отработка схемы функционирования ИНПК.
Схема функционирования ИНПК условно разделена на два этапа:
· предстартовый расчет опорных точек сканирование;
· сканирование по опорным точкам.
Для расчета опорных точек сканирования необходимо выполнить следующие действия:
1. Определение видимости на глубине сканирования;
2. Расчет шага сканирования.
3. Определение шага перехода между галсами (в общем случае считается равным шагу сканирования)
4. Деления акватории на кол-во шагов и переходов;
5. Измерение с шагом перехода опорных точек внешнего контура акватории.
6. Определение кол-ва береговых GPS точек и базы между ними;
7. Занесение контура водоёма в бортовой компьютер системы управление ИНПК;
8. Занесение GPS меток в бортовой компьютер ИНПК;
9. Определение стартовой точки пеленгации.
10. Определение направления перехода.
11. Установка ИНПА на воду.
12. Введение в БК GPS - метки №1
13. Расчет и отображение на мониторе схемы опорных точек.
14. Движение к следующей опорной точке и т.д.
При нахождении в очередной опорной точке ИНПА действует по следующему алгоритму:
1. Остановка;
2. Одновременно с остановкой - спуск погружного модуля (ПМ);
3. Остановка (ПМ);
4. Одновременно с остановкой ПМ – включение светотехники и видеокамеры;
5. Подъём ПМ;
6. Одновременно с подъёмом ПМ – запись и обработка видеоинформации в БК, передача с Надводного носителя по телеканалу оператору.
7. Возврат ПМ и ожидание.
Если результаты обработки видеоинформации удовлетворительны, по сигналу оператора осуществляется переход в следующую опорную точку и повторяется весь цикл алгоритма с 1 по 7. Если результаты неудовлетворительны, то выполняются шаги с 2 по 7 без покидания опорной точки.
Подобная схема функционирования позволяет достаточно эффективно с минимальными временными затратами обследовать в поисковом режиме значительные акватории.
Все работы были выполнены при поддержке Фонда содействия инновациям (Программа «УМНИК»).
