СОЗДАНИЕ ПАК СИМУЛЯТОРА МЕХАТРОННОГО ОБЪЕКТА
Журнал: Научный журнал «Студенческий форум» выпуск №14(193)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №14(193)
СОЗДАНИЕ ПАК СИМУЛЯТОРА МЕХАТРОННОГО ОБЪЕКТА
Аннотация. В процессе получения высшего образования одним из важнейших методов закрепления полученных знаний является их практическое применение. Для студентов технических специальностей в организации эффективного процесса обучения важное место занимает использование современного обучающего оборудования – программно-аппаратных комплексов (ПАК).
ПАК, в общем случае объединяет собой имитатор технологического оборудования или процесса и управляющий программный комплекс: компьютер или промышленный логический контроллер (ПЛК).
В связи с повсеместным использованием для программируемых контроллеров языков стандарта международной электротехнической комиссии IEC 61131 выбор управляющего контроллера в ПАК не столь важен – приёмы программирования будут практически одинаковые. Желаемое разнообразие рассматриваемых технологических процессов в ПАК – это необходимость расширения номенклатуры закупаемых учебных стендов и, как следствие увеличение финансовых затрат. В данной работе рассмотрен опыт самостоятельного проектирования ПАК на примере мехатронного комплекса «Мостовой кран». Основная часть работы направлена на получение методики создания ПАК мехатронных объектов, при помощи технологий твердотельного моделирования и 3-D печати, для последующего применения в учебном процессе студентами специальности «Автоматизация и управление». Описаны этапы, используемые для реализации проекта. Описана структура программного интерфейса и работа пользователя с ПАК.
Ключевые слова: мехатронный объект, твердотельное моделирование, ЧПУ, 3D-печать, ПЛК, микроконтроллер.
Введение
Для выработки методики создания стендов-симуляторов технологических объектов или процессов необходим выбор и описание функций ПАК. Объектом управления был выбран ПАК «Мостовой кран», позволяющий производить управление мехатронным объектом посредством ПЛК, микроконтроллера или вручную с пульта оператора. Задача работы заключается в создании методических указаний, позволяющих студенту разработать и создать ПАК силами учебной лаборатории, тем самым увеличивая парк лабораторных стендов и уменьшая себестоимость учебного оборудования.
Учебный стенд служит для использования в учебном процессе, в качестве наглядного примера вариантов управления мехатронными объектами. [1]
Структура реального мехатронного объекта приведена на рисунке 1.
Мостовой кран
Мостовой кран - подъемный кран, предназначенный для подъема, опускания и горизонтального перемещения различных грузов. Общим техническим признаком мостовых кранов является наличие у них трех взаимно перпендикулярных рабочих движений (подъем груза, передвижение тележки и перемещение всего крана). Тельфер расположенный на грузовой тележке производит подъем/опускание груза; грузовая тележка служит для перемещения груза вдоль моста крана; мост крана представляет собой металлоконструкцию, служащую для передвижения по ней грузовой тележки вдоль помещения, в котором он установлен. [2]

Рисунок 1. Устройство мостового крана
Первым этапом создания ПАК является прототипирование. В основе прототипа выбранного объекта механические узлы функционально должны соответствовать реальным. Вместе с тем допускается упрощения конструкции, позволяющие упростить производство ПАК. Применяемый вид моделирования – твердотельное моделирование. [3]
Грузовая тележка

Рисунок 2. Устройство грузовой тележки
Грузовая тележка, изображенная на рисунке 2, служит для подъема и перемещения груза вдоль моста крана и состоит из стальной рамы, на которой монтируются ведущие и поддерживающие колеса.
На реальной грузовой тележке устанавливаются:
- механизм движения тележки с электродвигателем и редуктором, тормозным устройством и двумя ограничителями хода;
- механизм подъема с электродвигателем, редуктором, канатным барабаном, тормозным устройством и ограничителем подъема.[3]

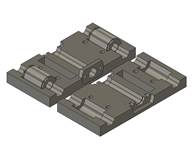
Рисунок 3. Устройство грузовой тележки ПАК
В модели грузовой тележки (рисунок 3) линейное перемещение реализовано за счёт пары линейных подшипников, осуществляющих свое движение вдоль цилиндрических направляющих. Приводом является двигатель постоянного тока, рассчитанный на питающее напряжение 12 В который через соединительную муфту передает вращающее движение на механическую пару винт-гайка удерживаемы подшипником вращения.
Мост

Рисунок 4. Устройство моста мостового крана
Мост (рисунок 4) представляет собой две параллельные жестко соединенные балки, на которых расположены рельсы, по которым осуществляет свое перемещение грузовая тележка.
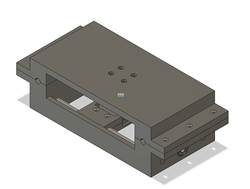

Рисунок 5. Устройство моста ПАК
Линейное перемещение моста ПАК (рисунок 5) осуществляется таким же образом, как и перемещение грузовой тележки, с тем отличием что для моста необходимы более длинные направляющие и ходовой винт.
Подкрановые балки и пути
Важнейшим элементом мостового крана являются подкрановые балки и подкрановые пути так как они удерживают на себе всю остальную конструкцию. В модели для прочного удержания направляющих применён кронштейн SK8, совмещённый с опорной колонной (рисунок 6).

Рисунок 6. Кронштейн SK8 и его применение в колонне
Осуществив моделирование еще нескольких вспомогательных элементов конструкции, произведём виртуальную сборку механической части ПАК «Мостовой кран» (рисунок 7).

Рисунок 7. Модель мостового крана
Вторым этапом создания ПАК является выбор способа изготовления модели мехатронного объекта.
Для изготовления деталей высокой точности на данный момент самыми распространёнными являются две технологии: ЧПУ обработка и 3D печать.
3D принтер и ЧПУ станок построены одинаково. То есть на одних и тех же принципах. Речь идет о том, чтобы сделать из исходного материала готовую модель. С 3D принтером можно создать желаемую модель с применением расходных материалов. А фрезерный ЧПУ станок ведет обработку заготовки и убирает все лишнее. Но у фрезерования есть минусы. Фрезерный станок способен изготовить деталь лишь по одному шаблону. Отдельные фрезерные станки не наделены способностью вырезать в материале бороздки так глубоко, как того требует программа, что требует от оператора доработку модели вручную. Фрезерным станком применяются конические фрезы, которые при обработке мелких деталей оставляют немного лишнего материала. У 3D принтера нет такого недостатка. Он «печатает» деталь точно в тех размерах, которые были заданы программой. Выбирая способом производства модели для ПАК 3D-печать, так же выбираем материал изготовления. PETG пластик сочетает в себе преимущества ABS пластика (прочность, термостойкость, долговечность) и PLA пластика (легкость использования), дает низкую термоусадку.
Третий этап создания ПАК симулятора мехатронного объекта: добавление управляющей автоматики и реализация ручного управления. Структура ПАК представлена на рисунке 10.
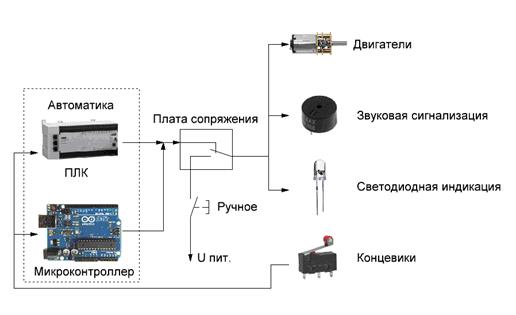
Рисунок 10. Структура ПАК
Мехатронный робототехнический комплекс включает в себя следующие составные части:
- Механическая часть;
- Исполнительные механизмы;
- Датчики;
- Элементы индикации/сигнализации;
- Управляющие органы.
Механическая часть ПАК «Мостовой кран» - выполнена из пластика. Для реализации перемещения узлов мостового крана применены готовые компоненты заводского изготовления: направляющие, винты, гайки, подшипники скольжения, подшипники вращения, кронштейны.
Исполнительные механизмы – двигатели постоянного тока с напряжением питания 12В.
Датчики – концевые выключатели, служащие для предупреждения поломки мехатронного объекта при достижении крайних положений.
Управляющие органы могут быть представлены:
1) Промышленными контроллерами (управляющие сигналы +24 В);
2) Микроконтроллерами (управляющие сигналы +5 В);
3) Операторский пульт ручного управления.
Для согласования сигналов кнопок ручного управления, микроконтроллера или ПЛК требуется плата сопряжения. На рисунке 11 приведен пример одного из узлов платы сопряжения.

Рисунок 11. Узел платы сопряжения – Кнопка «Движение вперед»
Принип работы данного узла платы сопряжения следующий: Для питания основной цепи подается 12 В постоянного напряжения. Сигнал «Стоп аварийный» служит для размыкания всей цепи питания пользователем ПАК в критических ситуациях. Концевой выключатель SQ1 размыкает цепь питания того узла, который отвечает за движение органа мехатронного объекта в сторону где он находится, т.е при срабатывании концевого выключателся дальнейшее движение в прямом направлении невозможно, но есть возможность осуществить движение узла мехатронного объекта в обратном направлении. K1 катушка реле, замыкающего цепь питания рабочего органа и сигнализаций. Переключатель SA2 «Ручной/Автоматический» позволяет производить коммутацию цепи рабочего органа в ручную с кнопок на пульте оператора, либо при помощи управляющих сигналов приходящий от промышленного контроллера или микроконтроллера. Входной узел R1, VD1 подает на транзистор VT1напряжение включения 24V от ПЛК. Входной узел R2, VD2 подает на транзистор VT1напряжение включения 5V от микроконтроллеров, например Arduino.
Заключение
В статье были рассмотрены этапы создания ПАК «Мостовой кран»при помощи технологий твердотельного моделирования и 3D печати. Как данные этапы могут быть обьеденены в типовое методическое пособие позволяющее любому студенту в последтсвии производить и работать с собственными ПАК симуляторами мехатронных объектов.
