ИССЛЕДОВАНИЕ И РАЗРАБОТКА КОМПЛЕКСНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ГУМАНОИДНЫМ РОБОТОМ
Журнал: Научный журнал «Студенческий форум» выпуск №17(326)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №17(326)
ИССЛЕДОВАНИЕ И РАЗРАБОТКА КОМПЛЕКСНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ГУМАНОИДНЫМ РОБОТОМ
Аннотация. В статье представлено исследование и разработка комплексной системы управления образовательным гуманоидным роботом, ориентированной на использование современных технологий и инструментов программирования. В условиях актуальности задачи разработки гуманоидных роботов в сфере образовательной робототехники проведено исследование существующих моделей систем управления, выявлены их ключевые достоинства и ограничения.
Цель исследования заключалась в разработке системы управления, обеспечивающей взаимодействие гуманоидного робота с оператором. В рамках разработки предложена архитектура системы, интегрирующая программирование на OpenCM через ArduinoIDE, использование веб-сервера на одноплатном компьютере NanoPi для обмена данными в сети, а также реализацию Python API и конфигуратора на базе Unity для контроля над роботом. Полученные в ходе исследования разработки демонстрируют практическую реализацию программного обеспечения для управления на различных уровнях, что позволяет рассматривать их применение в образовательных целях для обучения основам робототехники и программирования.
Ключевые слова: робототехника, человекоподобный робот, архитектура системы управления, анализ систем управления, разработка программного обеспечения.
ВВЕДЕНИЕ
В последние десятилетия возрос интерес к разработке и исследованию гуманоидных роботов в сфере образования. Основным требованием к таким гуманоидным роботам является необходимость высокой автономности, адаптивности и гибкости в изменяющихся условиях. Разработка комплексных систем управления, соответствующих этим требованиям, является одной из ключевых задач. Существуют различные подходы к построению таких систем, однако существующие технические решения могут сталкиваться с рядом нерешенных проблем.
В ходе исследования проводился анализ текущего состояния разработок в области систем управления образовательными гуманоидными роботами с акцентом на недостатки существующих реализаций. Для анализа и сравнения различных реализаций комплексных систем управления гуманоидными роботами, в данной работе выделены следующие ключевые параметры: Масштабируемость, гибкость, интеграция с внешними системами и интерфейсами. а также удобство программирования.
Основываясь на анализе существующих подходов, в статье предложено техническое решение реализации комплексной системы управления гуманоидным роботом. Описание данной системы включает в себя детализацию компонентного состава, принципов взаимодействия между уровнями архитектуры и механизмов обработки данных от датчиков и исполнительных устройств.
ОБЗОР СУЩЕСТВУЮЩИХ РЕШЕНИЙ
Для сравнения разработанных решений комплексной системы управления были выбраны следующие параметры: масштабируемость, гибкость, интеграция с внешними системами и интерфейсами. а также удобство программирования и поддержки. Масштабируемость необходима для обеспечения возможности расширения функциональных возможностей системы без сложного перепроектирования. Гибкость позволяет системе подстраиваться под различные задачи. Интеграция оценивает способность системы взаимодействовать с различными устройствами и программным обеспечением, что обеспечивает большую функциональность и удобство использования. Наконец, удобство программирования упрощает написание программ для решения задач системой управления.
Таблица 1.
Сравнение наборов образовательных гуманоидных роботов
|
|
Robotis BIOLOID Premium Kit |
"СЕРЁЖА ИН ПРО" |
Hovis Lite |
|
Масштабируемость |
Робота возможно пересобирать с различными конфигурациями в зависимости от задачи, которую требуется решить. |
Робот изначально находится в уже собранном состоянии, глобальные изменения в конструкции не предусмотрены. |
Робот поставляется с единственном конфигурационном виде. |
|
Гибкость |
Имеется собственное ПО для перезаписи движений под нужную задачу. Также имеется ПО для создания сложных сценариев. |
Имеется конфигурационное ПО с примерами движений, мобильное приложение для работы и десктопное решение. |
Имеется конфигурационное ПО с примерами движений, мобильное приложение для работы и десктопное решение. |
|
Интеграция с внешними системами и интерфейсами |
Возможно подключение следующих сенсоров: датчик расстояния, ИК-датчик, гироскоп.
|
Возможно подключение: модуль вентилятора, датчик ультразвука. |
Возможно подключение: микрофон, датчик света, датчик расстояния, акселерометр. |
|
Удобство программирования |
Имеется программа для создания движений с углами сервомоторов и временными отметками, также имеется блочная программа для более сложных сценариев. |
Программирование данного робота возможно через C++, Python, Java, JavaScript на одноплатном компьютере. Имеется конфигурационное ПО с примерами движений. |
Имеется программа для создания движений с углами сервомоторов и временными отметками, также имеется блочная программа для более сложных сценариев. |
Исходя из данных наборов следует выделить следующие решения: оба набора предлагают возможность программирования на различных языках, а также имеют инструменты для создания движений и выполнения более сложных сценариев. Должно поддерживаться несколько “уровней” сложности работы с роботом: начальный - пользователь пользуется только программными компонентами на верхнем уровне, средний - пользователь пользуется программами верхнего уровня, также используя н низкоуровневый код для реализации сложных сценариев.
ОПИСАНИЕ РАЗРАБАТЫВАЕМОЙ СИСТЕМЫ
В качестве комплексного решения был принят следующий вариант. В систему гуманоидного робота входят следующие компоненты: одноплатный микрокомпьютер, программируемый микроконтроллер, исполнительные механизмы и сенсоры. В общем виде система представлена на рис. 1. В сценарии работы с роботом рассматривается вариант управления в реальном времени при помощи персонального компьютера. Конфигуратор имеет инструменты для создания движений - запись углов серводвигателей во времени для их последующего выполнения роботом, а также инструменты мониторинга параметров состояния гуманоидного робота. Конфигуратор использует движок PhysX с физической моделью робота, что позволяет прототипировать и тестировать робота быстрее и безопаснее. API робота позволяет создавать такие же сценарии использования робота, не используя конфигуратор.

Рисунок 1. Глобальный вариант
Подробное описание системы представлено на рисунке 2.
На верхнем уровне находится оператор, взаимодействующий с системой через персональный компьютер. Оператор использует конфигуратор или API для создания заданий и миссий.
Одноплатный микрокомпьютер обеспечивает связь между высокоуровневым программным обеспечением и низкоуровневым оборудованием робота. Он содержит WebSocket сервер, который обеспечивает двустороннюю связь, позволяющую как отправлять команды от оператора к роботу, так и получать данные с робота. Сервер может обрабатывать как простые запросы: транслировать значения температур, углов, задания углов и другое; так и управлять выполнением сложных задач: имеется планировщик выполнения движений.
На функциональном уровне системы располагается программируемый контроллер, который обрабатывает данные, поступающие с микрокомпьютера. Микроконтроллер выполняет промежуточные вычисления приходящих данных с модулей, транслирует управляющие команды с микрокомпьютера и отправляет данные на него с модулей.
Логический уровень представляет интерфейс, функционирующий по протоколу Dynamixel для отправки и получения данных с подключенных модулей.
Подключаемые модули могут быть опционально выбраны пользователем. Таким образом повышается масштабируемость.
Предложенный вариант системы позволяет миновать верхний уровень и перейти к программированию робота на микроконтроллере или микрокомпьютере. Движения, которые были созданы на верхнем уровне, можно экспортировать отдельным файлом и загружать вместе с прошивкой, исполняя какой-либо сценарий, в котором данные движения необходимы.
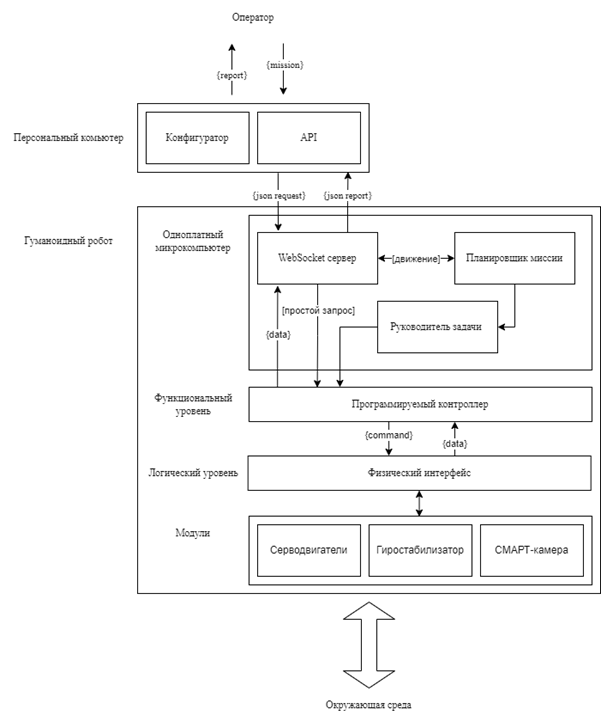
Рисунок 2. Схема взаимодействия гуманоидного робота
ЗАКЛЮЧЕНИЕ
Результаты проведенного исследования и разработки предложенной системы управления демонстрируют преимущества в контексте повышения эффективности, надежности и адаптивности гуманоидных роботов. Предложенная архитектура системы управления представляет собой важный шаг в направлении решения проблем, связанных с интеграцией высокоуровневых и низкоуровневых компонентов управления, что, в свою очередь, открывает новые возможности для исследований и разработок в данной области.
