Исследование финитно-временного адаптивного метода фильтрации и прогнозирования навигационных параметров
Журнал: Научный журнал «Студенческий форум» выпуск №19(70)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №19(70)
Исследование финитно-временного адаптивного метода фильтрации и прогнозирования навигационных параметров
В настоящее время повышение уровня безопасности полёта летательного аппарата является актуальной задачей. Для этого используются различные математические алгоритмы, в том числе и прогнозирующие, которые помимо авиации используются в различных областях.
В статье рассматриваются оптимальные алгоритмы дискретной фильтрации и прогноза навигационных параметров на примере оценки высоты полета летательного аппарата. Алгоритмы фильтрации и прогноза высоты полета летательного аппарат основываются на использовании финитно-временного метода оценки сигналов [1] и фильтрации Калмана в адаптивном и неадаптивном режимах работы. В качестве критериев оценки качества используются дисперсии ошибки оценки. В исследуемой системе для оценки навигационной координаты используется радиотехнический высотомер.
В работе рассматривается линейная модель измерения с аддитивной погрешностью. Моделями измеряемого сигнала ![]() и погрешности
и погрешности ![]() измерителя являются нормальные стационарные эргодические процессы некоррелированные между собой. На входе фильтра результат измерения определяется соотношением:
измерителя являются нормальные стационарные эргодические процессы некоррелированные между собой. На входе фильтра результат измерения определяется соотношением:
![]()
где i = 1…N, N – объём используемой выборки для прогноза сигналов, ![]() – соответственно скалярные результаты измерения, полезного сигнала и погрешности измерения.
– соответственно скалярные результаты измерения, полезного сигнала и погрешности измерения.
Как известно [1], использование финитно-временной обработки для фильтрации и прогнозирования сигналов значительно упрощает алгоритмы обработки сигналов. При этом позволяет применять единые алгоритмы обработки как в случае наличия коррелированных, так и некоррелированных погрешностей измерения, обеспечивает более устойчивую работу, повышает устойчивость работы алгоритмов относительно фильтрации Калмана.
Алгоритм прогнозирования сигналов на основе финитно-временного фильтра базируется на следствии теоремы ортогонального проецирования Пугачева [3] и в случае некоррелированности сигнала и помехи определяется следующей матрицей преобразования наблюдаемого сигнала:
![]()
где ![]() – оптимальная по критерию среднего квадрата ошибки оценки матрица,
– оптимальная по критерию среднего квадрата ошибки оценки матрица, ![]() – матрица корреляционных моментов полезного сигнала,
– матрица корреляционных моментов полезного сигнала, ![]() – матрица корреляционных моментов результата измерения, d – дискрет. Размерности рассматриваемых матриц r×r, где r – память финитно-временного фильтра, pr – время прогноза сигнала на скользящем интервале времени.
– матрица корреляционных моментов результата измерения, d – дискрет. Размерности рассматриваемых матриц r×r, где r – память финитно-временного фильтра, pr – время прогноза сигнала на скользящем интервале времени.
Матрица корреляционных моментов измерений размерностью r×r равна:
![]()
Измеряемый сигнал ![]() в случае дискретной обработки образуется в виде следующего вектора
в случае дискретной обработки образуется в виде следующего вектора ![]() размерностью r×1 за счет использования предыдущих результатов измерений к моменту времени i:
размерностью r×1 за счет использования предыдущих результатов измерений к моменту времени i:
Оптимальная оценка прогноза сигнала определена по формуле:
![]()
В случае если интервал времени прогноза сигнала pr = 0, то ![]() будет являться оценкой фильтрации сигнала в момент времени i.
будет являться оценкой фильтрации сигнала в момент времени i.
Оценка точности фильтрации и прогноза на выбранный интервал времени для произвольного вида оценок финитно-временного метода прогнозирования равна:
![]()
где ![]() – матрица корреляционных моментов оптимальных оценок, определяемая следующим выражением:
– матрица корреляционных моментов оптимальных оценок, определяемая следующим выражением:
![]()
Оптимальная оценка точности фильтрации и прогноза после окончания переходного процесса также можно представить в следующем виде:
![]()
Статистическая оценка математического ожидания ошибки оценки определяется по формуле [4]:
![]()
где ![]() – ошибка оптимальной оценки.
– ошибка оптимальной оценки.
Статистическая оценка дисперсии ошибки оптимальной оценки ![]() фильтрации и прогноза в случае наблюдаемых стационарных процессов вычисляется по следующему выражению:
фильтрации и прогноза в случае наблюдаемых стационарных процессов вычисляется по следующему выражению:
![]()
Статистическая дисперсия ![]() после окончания переходного процесса совпадает с теоретическими дисперсиями. Оценку времени адаптации финитно-временного алгоритма можно получить путем сравнения значений дисперсий
после окончания переходного процесса совпадает с теоретическими дисперсиями. Оценку времени адаптации финитно-временного алгоритма можно получить путем сравнения значений дисперсий ![]() и
и ![]() при выбранном значении их разности.
при выбранном значении их разности.
Прогноз в случае априорной неопределенности матриц корреляционных моментов полезного сигнала ![]() и погрешности
и погрешности ![]() основывается на использовании байесова адаптивного метода оценки неизвестных матриц фильтрации и прогноза сигнала по результатам полученных измерений [6]. Для этой цели осуществляется статистическая оценка неизвестной корреляционной матрицы результатов измерений
основывается на использовании байесова адаптивного метода оценки неизвестных матриц фильтрации и прогноза сигнала по результатам полученных измерений [6]. Для этой цели осуществляется статистическая оценка неизвестной корреляционной матрицы результатов измерений ![]() в соответствии с формулой:
в соответствии с формулой:
![]()
где ![]() – адаптивная оценка математического ожидания размерностью r×1, вычисленная по формуле:
– адаптивная оценка математического ожидания размерностью r×1, вычисленная по формуле:
![]()
В случае априорной неопределенности относительно корреляционной матрицы ![]() и некоррелированности сигнала и помехи её оценка осуществляется в соответствии со следующей формулой:
и некоррелированности сигнала и помехи её оценка осуществляется в соответствии со следующей формулой:
![]()
В данном случае адаптивная оптимальная матрица оценки сигнала прогноза ![]() вычислена по формуле:
вычислена по формуле:
![]()
В случае априорной неопределенности относительно корреляционной матрицы ![]() и некоррелированности сигнала и помехи её оценка осуществляется в соответствии со следующей формулой:
и некоррелированности сигнала и помехи её оценка осуществляется в соответствии со следующей формулой:
![]()
В данном случае адаптивная оптимальная матрица оценки сигнала прогноза ![]() вычислена по формуле:
вычислена по формуле:
![]()
Полученные статистические оценки указанных матриц
![]() позволяют использовать приведенный выше алгоритм.
позволяют использовать приведенный выше алгоритм.
В случае если интервал времени прогноза сигнала pr = 0, то адаптивная оценка сигнала будет являться оценкой фильтрации сигнала.
Определение оптимальной оценки дискретного фильтра Калмана [5] осуществляется на основании теоремы Дуба [3], где оптимальный прогноз определяется условным математическим ожиданием:
![]()
где ![]() – оптимальная оценка сигнала, X, Y – соответственно оцениваемый и наблюдаемый сигналы.
– оптимальная оценка сигнала, X, Y – соответственно оцениваемый и наблюдаемый сигналы.
В качестве корреляционной характеристики оцениваемого сигнала выбирается следующая функция:
![]()
где i, j = 1…N, σ – среднеквадратическое отклонение от требуемого значения высоты полета, α – параметр корреляционной функции, d – дискрет.
Как известно, случайный нормальный процесс с данной корреляционной функцией является марковским процессом [2].
Моделью погрешности радиотехнического высотомера является белый шум, корреляционная функция которого определяется выражением:
![]()
где i, j = 1…N, ![]() – среднеквадратическое отклонение белого шума,
– среднеквадратическое отклонение белого шума, ![]() – дельта-функция.
– дельта-функция.
Анализ рассматриваемых алгоритмов фильтрации и прогноза сигнала в случае полной априорной неопределенности и адаптивной оценки матрицы корреляционных моментов полезного сигнала осуществлен в процессе моделирования при следующих исходных данных:
- объем выборки N = 5000;
- среднеквадратическое отклонение полезного сигнала ![]() ;
;
- среднеквадратическое отклонение погрешности радиовысотомера ![]() ;
;
- память финитно-временной обработки r = 5;
- интервал времени прогноза сигнала pr = 20;
- параметр корреляционной функции α = от 0,01 1/с:
- дискрет d = 5 с. Как известно, по теореме Котельникова дискрет не должен превышать значения:
Сравнительные результаты моделирования для исследуемых алгоритмах приведены на следующих графиках:
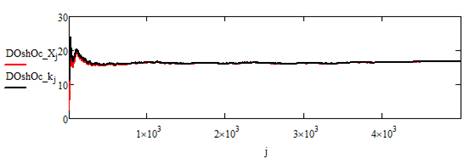
Рисунок 1. Изменение дисперсии ошибок оценок финитно-временной фильтрации на текущем интервале времени r·d (DOshOc_X) и фильтра Калмана (DOshOc_k) от дискретного времени i

Рисунок 2. Изменение дисперсии ошибок оценок финитно-временного прогноза на текущем интервале времени r·d (DOshOc_Xpr) и прогноза фильтра Калмана (DOshOc_kpr) от дискретного времени i

Рисунок 3. Изменение дисперсии ошибок оценок адаптивной финитно-временной фильтрации на текущем интервале времени r·d (DOshOc_Kx) и адаптивного прогноза фильтра Калмана (DOshOc_kA) от дискретного времени i

Рисунок 4 . Изменение дисперсии ошибок оценок адаптивного финитно-временного прогноза на текущем интервале времени r·d (DOshOc_Kxpr) и адаптивного прогноза фильтра Калмана (DOshOc_kApr) от дискретного времени i
Как видно из приведенных рисунков, финитно-временная обработка незначительно уступает по точности методу Калмана при выбранных исходных данных. При увеличении памяти финитно-временного алгоритма его точность прогноза будет приближаться к фильтрации Калмана. При этом адаптивная финитно-временная обработка по точности превосходит адаптивный прогноз Калмана.
По результатам проведенного моделирования была сделана сравнительная оценка методов обработки на робастность и помехозащищенность исследуемых алгоритмов. Диапазоны изменения данных: ![]()
![]()

Рисунок 5. Изменение дисперсии ошибки оценки финитно-временного прогноза (![]() ) и прогноза фильтра Калмана (
) и прогноза фильтра Калмана (![]() ) от изменения параметра r
) от изменения параметра r

Рисунок 6.Изменение дисперсии ошибки оценки адаптивного финитно-временного прогноза (![]() ) и адаптивного прогноза фильтра Калмана (
) и адаптивного прогноза фильтра Калмана (![]() ) от изменения параметра r
) от изменения параметра r
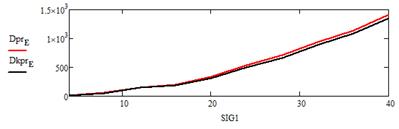
Рисунок 7. Изменение дисперсии ошибки оценки финитно-временного прогноза (![]() ) и прогноза фильтра Калмана (
) и прогноза фильтра Калмана (![]() ) от изменения параметра SIG1
) от изменения параметра SIG1

Рисунок 8. Изменение дисперсии ошибки оценки адаптивного финитно-временного прогноза (![]() ) и адаптивного прогноза фильтра Калмана (
) и адаптивного прогноза фильтра Калмана (![]() ) от изменения параметра SIG1
) от изменения параметра SIG1
В результате проделанной работы было показано, что финитно-временная обработка при фильтрации и прогнозирования сигналов незначительно уступает по точности методу Калмана при выбранной памяти, но имеет более простой математический аппарат. Данные алгоритмы по свойствам робастности и помехозащищенности практически не отличаются друг от друга. При увеличении памяти финитно-временная обработка асимптотически стремится по точности к фильтрации Калмана, как в адаптивном режиме, так и при полной априорной неопределенности. Финитно-временная обработка является более универсальной по сравнению с фильтром Калмана.
