Исследование структурной модели бурильной колонны
Журнал: Научный журнал «Студенческий форум» выпуск №23(74)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №23(74)
Исследование структурной модели бурильной колонны
Рассмотрена структурная модель бурильной колонны, как последовательное соединение элементарных звеньев. Проведено исследование этой структуры по динамическим свойствам с использованием пакета математических программ MatLab.
Самые распространённые показатели динамики бурильной колонны: закручивание бурильной колонны, крутильные и продольные её колебания, возникновение соударений изгибных полуволн о стенки скважины, стопорение и проскальзывание бурового инструмента, изменение угловой скорости породоразрушающего инструмента в результате крутильных автоколебаний бурильной колонны на забое скважины, изменения геолого-технологических параметров грунта и т.д [1].
Колонну бурильных труб можно рассматривать как многомассовую систему, объединённую упругой связью (рисунок 1).
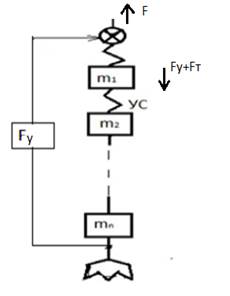
Рисунок 1. Колонная бурильных труб, представленная как многомассовая система
На рисунке 1 изображены ![]() – распределённые массы, F – сила, приложенная к бурильной колонне, УС – упругая связь,
– распределённые массы, F – сила, приложенная к бурильной колонне, УС – упругая связь, ![]() – сила тяжести бурильной колонны,
– сила тяжести бурильной колонны, ![]() – упругая сила, включающая диссипативную силу. Цепочная многомассовая модель содержит n сосредоточенных масс с массами
– упругая сила, включающая диссипативную силу. Цепочная многомассовая модель содержит n сосредоточенных масс с массами ![]() между массами имеется упругая связь с взаимными жесткостями
между массами имеется упругая связь с взаимными жесткостями ![]() . Вместо неравномерно распределенного по длине колонны силы, здесь фигурирует сила упругого взаимодействия.
. Вместо неравномерно распределенного по длине колонны силы, здесь фигурирует сила упругого взаимодействия.
Движение масс описываются следующими уравнениями (1)…(5).
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
![]() (5)
(5)
где ![]() – диссипативная сила, Н;
– диссипативная сила, Н;
![]() – перемещение, м;
– перемещение, м;
![]() – коэффициент вязкого трения, Н·м·с;
– коэффициент вязкого трения, Н·м·с;
![]() – линейная скорость перемещения бурильной колонны, м/с.
– линейная скорость перемещения бурильной колонны, м/с.
Структура многомассовой модели представлена на рисунке 2. Жесткость упругой передачи характеризуется жесткостью материала. Жесткость при поступательном движении определяется по формуле (6):
![]() (6)
(6)
где ![]() – модуль упругости растяжения,
– модуль упругости растяжения, ![]() ;
;
![]() – поперечное сечение,
– поперечное сечение, ![]() ;
;
![]() – длина звена, м.
– длина звена, м.

Рисунок 2. Структурная схема бурильной колонны
Произведем исследование структурной модели буровой колонны в среде MatLab Simulink с учетом конкретных значений параметров бурения и электропривода. В таблице 1 приведены параметры электропривода.
Таблица 1.
Параметры электропривода
|
Мощность
|
Угловая скорость |
Передаточное число редуктора и полиспаста |
Номинальный момент, кНм |
Суммарный момент инерции, кгм2 |
|
900 |
160,71 |
128,568 |
9,071 |
26,69 |
Значения параметров колонны приведены в таблице 2.
Таблица 2.
Параметры буровой колонны
|
Наружный диаметр, м |
Ширина стенки, м |
Масса 1 м трубы, кг/м |
Масса свечи в буровом инструменте,кг |
Глубина забоя, м |
|
0,085 |
0,006 |
50 |
10000 |
2000 |
Модель буровой колонны представим как, 10 равномерно распределённых масс. Длина свечи в данном случае составляет 200 м, масса свечи – 10000 кг.

Рисунок 3. Модель первой массы буровой колонны в среде MatLab Simulink
На рисунке 1 изображены:
1) F – сила тяги привода буровой лебедки;
2) Fсопр – сила сопротивления (сила тяжести);
3) V – линейная скорость перемещения первой массы;
4) Vос – отрицательная обратная связь;
5) m – масса участка колонны;
6) Cj – жесткость участка;
7) Betta – коэффициент вязкого трения;
8) Fy – сила упругости, которая является заданием для следующей массы.
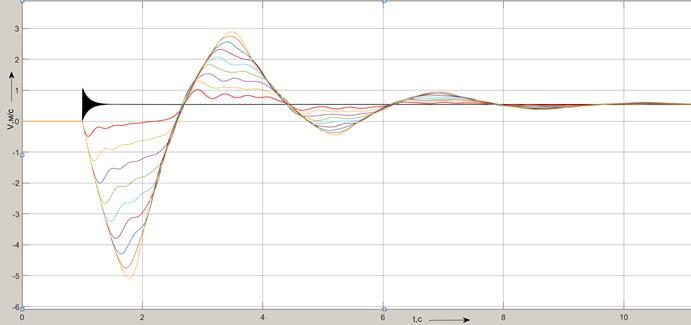
Рисунок 4. Кривые изменения скорости буровой колонны
На рисунке 4 приведены кривые изменения изменения скорости буровой колонны при различных массах. Вид характеристики определяется от глубины скважины. В данной модели учтена отрицательная обратная связь, согласно структурной схеме (рисунок 2).
Из рисунка 4 видно, что в начальный момент подъема буровой колонны наблюдаются колебания системы. В момент времени 8 секунд колебания затухают и дальнейший подъем происходит в установившемся режиме.
На рисунке 5 представлены кривые сил, действующие на многомассовую систему буровой колонны.
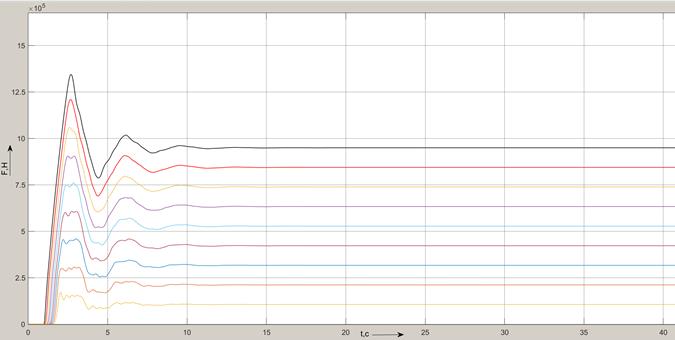
Рисунок 5. Графики сил, действующие на многомассовую систему
Из рисунка 5 видно, что наибольшее усилие, в установившийся момент, действует на первую массу (F=950кН).
Для уменьшения колебаний системы в момент начала движения буровой колонны необходимо плавное регулирование скорости привода буровой лебедки. Оптимальным, для данной модели, считаем внедрение систем управления «Преобразователь частоты-асинхронный электродвигатель с короткозамкнутым ротором»
