Статья:




Развитие конструктивных схем экзоскелетов
Секция: Технические науки
Выходные данные
Соколов Д.А. Развитие конструктивных схем экзоскелетов // Технические и математические науки. Студенческий научный форум: электр. сб. ст. по мат. I междунар. студ. науч.-практ. конф. № 1(1). URL: https://nauchforum.ru/archive/SNF_tech/1(1).pdf (дата обращения: 26.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

I Студенческая международная научно-практическая конференция «Технические и математические науки. Студенческий научный форум»
Развитие конструктивных схем экзоскелетов
Соколов Денис Александрович
студент, Лысьвенский филиал Пермского национального исследовательского политехнического университета, Россия, г. Лысьва
Поезжаева Елена Вячеславовна
научный руководитель, профессор, Лысьвенский филиал Пермского национального исследовательского политехнического университета,
Россия, г. Лысьва
Наука и технологии —это постоянное соперничество изобретательности человека и природы. С древнейших времен человек стремится изменить окружающий мир для улучшения своей жизнедеятельности, не нарушая законов природы. Некоторые беспозвоночные имеют внешний скелет, но у человека он отсутствует.
Сейчас появляется потребность в устройствах, усиливающих физические способности человека. Одним из путей разрешения предоставленной задачи считается использование человеко-машинных систем (устройств), где взаимодействие оператора и механизма приводит к отличным показателям человеческих способностей. Одним из примеров разработок систем считаются экзоскелеты.
Экзоскелет — прибор, предназначенный для восполнения утраченных функций, наращивания силы мускул человека и расширения амплитуды перемещений за счёт наружного каркаса и приводящих частей. Аналогичные приборы могут применяться в военном деле ( антитеррор, штурмовые и саперные операции, установка трудной брони и вооружения) и в будничной жизни. В мирной жизни у экзоскелетов есть задачки трёх типов: строительно-логистическая, медицинская и особая. Строительный экзоскелет имеет возможность нести на себе строительное оснащение или же применяться в качестве погрузчика. Медицинские экзоскелеты можно использовать как инвалидные коляски для больных людей и инвалидов. Особые экзоскелеты могут быть как оборудованием для спасателей, так и механизированными водолазными или[5,c.253] же защитными костюмами. В настоящее время проводится функциональная разработка экзоскелетов. Разработки необходимы для создания систем вертикального положения человека и усиления его физических возможностей. Предлагается рассмотреть вопрос о применении экзоскелета для подъема груза в том[6,c24] случае, когда для этого[6,c24] потребуется перемещение всех механизмов (рук, ног и корпуса). Аналогичные действия аппарата равносильны различной работе с грузом и функциональными действиями оператора. Организация управляемого подъема груза из такового исходного положения соединит в себе задачи вертикализации механизма и манипулирования груза с поддержкой «рук» экзоскелета.
Для исследования рассмотрим модели экзоскелетов XOS 2 и HAL (Рис.1,2) XOS 2, при весе в 80 килограммов, позволяет человеку поднять 90 дополнительных килограммов, а экзоскелет HAL японского производителя роботов Cyberdyne обеспечивает возможность ходить людям с ограниченными возможностями и поднимать тяжелые грузы.


Рисунок 1. Рисунок 2.
Предлагается система с гидравлическим приводом, управляемым оператором через систему рычагов, контролирующимися гидрораспределителями. В отличии от имеющихся аналогов, в разработке системы кое-какие суставные узлы станут двигать мускульные силы оператора. Для снижения нагрузки на позвоночник, мышцы и суставы человека используется полный каркас человеческого тела, дополнительные гидроцилиндры в коленных, локтевых суставах и суставах ступни, в поясничном отделе. Ступоходы экзоскелета изготавливаются из плотного амортизирующего материала. Схему конструкции ноги можно рассмотреть на рисунке 3:[4]
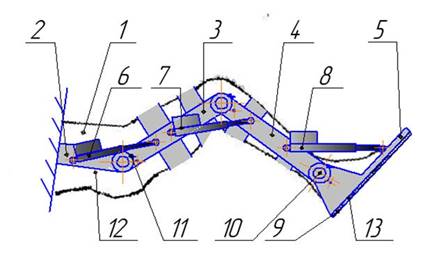
Рисунок 3. Схема конструкции ноги экзоскелета человека (вид сбоку):[4]
1 – Нога человека; 2 - Стойка; 3 - Бедренное звено; 4 - Голень; 5 - Стопа; 6, 7, 8 - Приводы линейного перемещения; 9 - Резиновая подошва; 10 - Датчик угла поворота (энкодер); 11 - Предохранительный концевой датчик; 12- Ремни для укрепления на ноге человека; 13 - Датчик нагрузки на опорную пяту. [4].
Ключевое различие в системе управления заключается в том, что она построена на основе механизмов, исключая электронику. Это повышает возможности ремонта и снижает стоимость изделия. В силовой установке возможно применять малогабаритные бензогенераторы, которые объединяются с электромотором, который приводит в движение вал гидронасоса. Управлять данным механизмом возможно при помощи 12-клапанного гидрораспределителя. Штоки гидрораспределителя можно приводить в движение при помощи тяг, контролируемых оператором, что упрощает починку в полевых условиях. Дополнительно возможно ввести датчик нагрузки и контроля напряжения питания для защиты батареи от полного разряда и информирования пользователя об оставшемся времени автономной работы. Примерная схема указана на рисунке 2.[2]
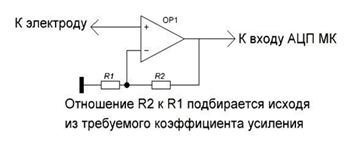
Рисунок. 4 Схема датчика [2]
Основными преимуществами данного экзоскелета являются энергетическая свобода, дешевизна в сборке и ремонте в разных условиях.
Механические системы очень широко распространяются в современной технике. Самым востребованным направлением в развитии и внедрении робототехнических систем являются экзоскелеты. Следовательно, с развитием новых технологий в разных областях науки, будут открываться новые возможности в изготовлении новых материалов, экзоскелеты будут усовершенствоваться, уменьшаться в размерах и становиться более точными.
Список литературы:
1. Поезжаева Е.В. «Концепция развития робототехники». — Пермь: ПНИПУ, 2017. — 440 с.
2. Экзоскелет своими руками // Глобальная Научно-Техническая Информация. URL: http://gnti.ru/Экзоскелет%20своими%20руками/1Z9kyt6ShrI (дата обращения: 20.12.2017).
3. Ekso Bionics. URL: http://eksobionics.com/ (дата обращения: 24.12.2017)
4. Применение мехатронных систем в медицинской технике // Официальный портал Юго-Западного государственного университета. URL: https://www.swsu.ru/structura/up/fiu/tmim/med-teh/#3 (дата обращения: 30.12.2017).
5. Верхов С.С. Экзоскелет с гидравлическим приводом // xii международная научная конференция «физика и радиоэлектроника в медицине и экологии» . — 2016. — №1. — С. 253-254.
6. С.Ф. Яцун,С.И. Савин, А.С. Яцун, Г.В. Климов/. Кинематический анализ экзоскелета в процессе подъема груза // ИЗВЕСТИЯ Юго-Западного государственного университета Серия ТЕХНИКА И ТЕХНОЛОГИИ. — 2015. — №3. — С. 24-30.
