Статья:




МОДЕРНИЗАЦИЯ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ С ИСПОЛЬЗОВАНИЕМ ШИРОКОПОЛОСНОГО ЗОНДИРУЮЩЕГО ФАЗОМАНИПУЛИРОВАННОГО СИГНАЛА
Секция: Технические науки
Выходные данные
Гриненко А.И. МОДЕРНИЗАЦИЯ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ С ИСПОЛЬЗОВАНИЕМ ШИРОКОПОЛОСНОГО ЗОНДИРУЮЩЕГО ФАЗОМАНИПУЛИРОВАННОГО СИГНАЛА // Технические и математические науки. Студенческий научный форум: электр. сб. ст. по мат. LIV междунар. студ. науч.-практ. конф. № 9(54). URL: https://nauchforum.ru/archive/SNF_tech/9(54).pdf (дата обращения: 25.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

LIV Студенческая международная научно-практическая конференция «Технические и математические науки. Студенческий научный форум»
МОДЕРНИЗАЦИЯ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ С ИСПОЛЬЗОВАНИЕМ ШИРОКОПОЛОСНОГО ЗОНДИРУЮЩЕГО ФАЗОМАНИПУЛИРОВАННОГО СИГНАЛА
Гриненко Андрей Игоревич
магистрант, Ульяновский государственный технический университет, РФ, г. Ульяновск
Гульшин Владимир Александрович
научный руководитель, доцент, Ульяновский государственный технический университет,
РФ, г. Ульяновск
Введение
В современном мире высоких технологий радиолокационные системы занимают особое место. С появлением большого числа беспилотных летательных аппаратов возникла потребность в их обнаружении и идентификации в воздушном пространстве. Одновременно с этим возросли скорости пилотируемых летательных аппаратов. Также развитие получили системы постановки помех [4]. Все это делает радиолокационные системы второй половины прошлого века устаревающими. С экономической точки зрения более выгодно модернизировать устаревшую систему, чем разрабатывать принципиально новую.
Известна целая серия сигналов, называемых широкополосными (сложными) [3] [2]. Они позволяют обойти противоречие между увеличением дальности обнаружения цели и уменьшением разрешающей способности по дальности за счет дополнительной модуляции. Однако в радиолокации они стали применяться относительно недавно из-за ряда особенностей их генерирования, приема и обработки [1].
В статье предлагается вариант модернизации радиолокационной системы, путем замены зондирующего сигнала с линейно-частотно-модулированного (ЛЧМ) с полосой пропускания Δfпрм = 1,5 МГц на фазоманипулированный (ФМ) с полосой пропускания приемного устройства Δfпрм = 64,5 кГц.
Моделирование разрешающей способности по дальности
Предлагается выбрать 31-позиционный ФМ сигнал, кодированный М-последовательностью из условия что длина последовательности:
 (1)
(1)
Примем длительность одного элементарного импульса τи = 0,5 мкс и получим вид принятого сигнала А = {1,-1,-1,1,1,-1,1,-1,1,-1,1,-1,-1,-1,1,1,-1,1,1,-1,-1,1,-1,1,1,-1,1,-1,1,-1,1} на выходе оптимального фильтра (ОФ) по известной схеме N-позиционного ФМ сигнала [5]:
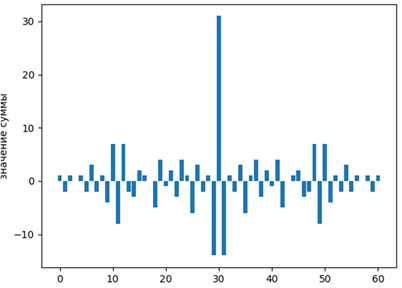
Рисунок 1. Вид сигнала на выходе ОФ
Ярко выражен пик в центре. Боковые лепестки существенно ниже центрального пика.
Работа модернизируемой РЛС состоит также в обнаружении нескольких целей одновременно, поэтому проанализируем случай, когда в приемное устройство попадает два эхо-сигнала:
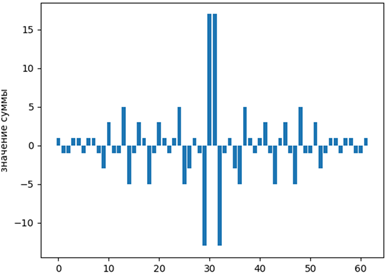
Рисунок 2. Вид сигнала на выходе ОФ, смещённого на 1 позицию
Исходя из полученного графика следует, что разрешающая способность по дальности ограничивается длительностью внутреннего импульса М-последовательности зондирующего сигнала и рассчитывается следующим образом:

Сравнительный расчет дальности обнаружения цели
Для большей наглядности вычислим и сравним некоторые параметры РЛС при использовании простого зондирующего сигнала, а также сложных ЛЧМ и ФМ сигналов.
Дальность действия РЛС в свободном пространстве, т. е. в случае, когда влиянием подстилающей поверхности можно пренебречь, определяется формулой 3:

где Pпрд – импульсная мощность передатчика РЛС;
Gпрд – максимальное значение коэффициента усиления антенны передатчика;
Gпрм – максимальное значение коэффициента усиления антенны приемника;
λ – рабочая длина волны РЛС;
σ – эффективная площадь рассеяния цели;
k – постоянная Больцмана;
T – абсолютная температура приемника;
kш – коэффициент шума приемника;
Δfпрм – полоса пропускания приемника РЛС;
kр – коэффициент различимости.
Из формулы (3) выразим величину кр, показывающую отношение сигнал/шум, зададим параметры РЛС и построим график зависимости отношения сигнал/шум от максимальной дальности работы РЛС.

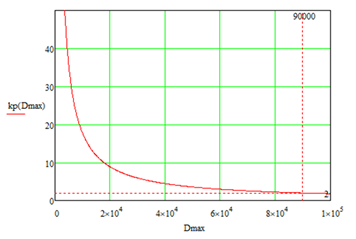
Рисунок 3. Зависимость коэффициента различимости от дальности обнаружения при использовании простого сигнала
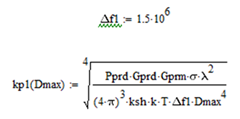
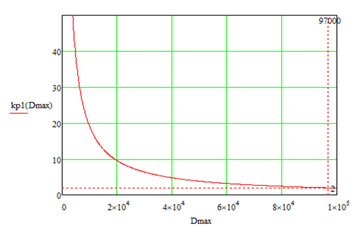
Рисунок 4. Зависимость коэффициента различимости от дальности обнаружения при использовании ЛЧМ сигнала
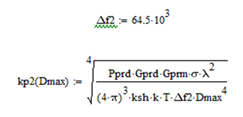
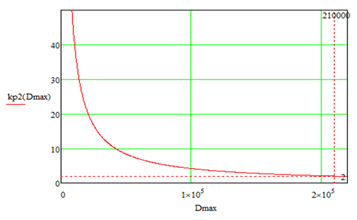
Рисунок 5. Зависимость коэффициента различимости от дальности обнаружения при использовании ФМ сигнала
Из полученных графиков следует, что дальность обнаружения цели РЛС, использующей 31-позиционный ФМ зондирующий сигнал возросла на 113 км относительно ЛЧМ сигнала.
Список литературы:
1. Бакулев П.А. Радиолокационные системы. Учебник для вузов. – М.: Радиотехника, 2004. – 320 с.
2. Барабашов Б.Г., Анишин М.М. Широкополосные системы связи и сигналы. Учебно-методическое пособие. – Ростов-на-Дону: ЮФУ, 2008. – 36 с.
3. Варакин Л.Е. Теория сложных сигналов –М.: изд-во «Советское радио», 1970. – 376 с.
4. Основы построения радиолокационных станций радиотехнических войск / В.Н. Тяпкин, А.Н. Фомин, Е.Н. Гарин и др. – Красноярск: СФУ, 2011. – 536 с.
5. Шумоподобные сигналы в системах передачи информации / В.Б. Пестряков, В.П. Афанасьев, В.Л. Гурфиц и др.; под ред. В.Б. Пестрякова. – М.: Советское радио, 1973. – 424 с.
