Статья:




ПРИНЦИП ПОСТРОЕНИЯ КЛАССИЧЕСКОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ FMS
Секция: Технические науки
Выходные данные
Удовиченко В.М. ПРИНЦИП ПОСТРОЕНИЯ КЛАССИЧЕСКОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ FMS // Технические и математические науки. Студенческий научный форум: электр. сб. ст. по мат. LV междунар. студ. науч.-практ. конф. № 10(55). URL: https://nauchforum.ru/archive/SNF_tech/10(55).pdf (дата обращения: 29.07.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 17 голосов
Мне нравится17
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

LV Студенческая международная научно-практическая конференция «Технические и математические науки. Студенческий научный форум»
ПРИНЦИП ПОСТРОЕНИЯ КЛАССИЧЕСКОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ FMS
Удовиченко Владислав Михайлович
студент, Белгородский государственный технологический университет, РФ, г. Белгород
Погорелов Алексей Владимирович
научный руководитель, старший преподаватель,
Белгородский государственный технологический университет, РФ, г. Белгород
THE PRINCIPLE OF CONSTRUCTION OF THE CLASSICAL AUTOMATIC FLIGHT CONTROL SYSTEM FMS
Vladislav Udovichenko
Student, Belgorod State Technological University, Russia, Belgorod
Alexey Pogorelov
Scientific supervisor, Senior lecturer, Belgorod State Technological University, Russia, Belgorod
Аннотация. В представленной статье рассмотрены основные функциональные узлы системы автоматического управления FMS. Разобран принцип работы каждого модуля системы, назначение основных элементов и комплексов управления авиалайнером. Проанализирована организационная структура системы управления авиалайнером посредствам функциональных узлов и логических связей между входными и выходными сигналами каждого элемента системы управления.
Abstract. In the presented article, the main functional components of the automatic control system FMS are considered. The principle of operation of each module of the system, the purpose of the main elements and control systems of the airliner are analyzed. The organizational structure of the airliner control system is analyzed by means of functional nodes and logical connections between the input and output signals of each element of the control system.
Ключевые слова: управление авиалайнером, модули автоматического управления, функциональная схема FMS, система управления полетом.
Keywords: airliner control, automatic control modules, functional diagram FMS, flight control system.
Автоматизация процесса управления авиалайнером представляет собой влияние на аэродинамические параметры воздушного судна посредством программно-аппаратных комплексов. С точки зрения теории автоматического управления (ТАУ) самолет описывается системой нелинейных нестационарных дифференциальных уравнений [1, с.84] их решение заложено принципе функционирования системы автоматического управления полетом. В рамках этой статьи мы рассмотрим системы управления одного из самых популярных американских авиалайнеров - Boeing-767-300ER.
Boeing-767-300ER – широкофюзеляжный авиалайнер с увеличенной дальностью полета. Разработчики оснастили эту модель усовершенствованной системой подачи топлива. Кроме того, лайнер характеризуется высокой эффективностью в управлении, и обладает улучшенной электронной системой контроля полета Fly Menegment System (FMS). Система управления полетом FMS, как правило, устанавливается на трансатлантических авиалайнерах, поскольку управлять большими объектами гораздо сложнее. Принцип работы САУ авиалайнера основан на замкнутом управлении, то есть на взаимодействии модулей автоматического управления с оператором, что реализовано в системе неавтоматического управления.
Функциональная схема FMS состоит из классических модулей управления и контроля аэродинамических параметров, отвечающих за: снижение нагрузки на летательный аппарат посредствам использования программно-контроллерных модулей; управление траекторией перемещения в процессе полета посредствам использования датчиков типа GPS и ILS, установленных в радионавигационном модуле системы управления; возможность вмешательства оператора в систему управления посредством дисплеев (CDU); автоматическую запись параметров полета, изменения траектории, тяговых или аэродинамических параметров полета в бортовую приборную систему (EFIS) и встроенную навигационную базу данных [2].
На рисунке 1 представлена функциональная схема системы автоматического управления полетом FMS.
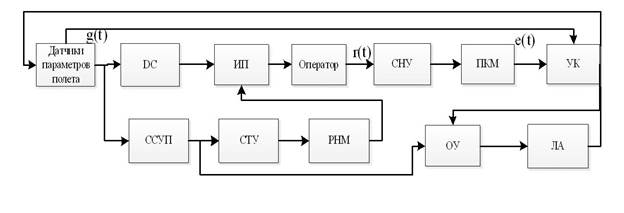
Рисунок 1. Функциональная схема системы управления FMS
DC - логический блок преобразования сигналов (дешифратор); ИП -индикатор параметров, СНУ - система неавтоматического управления;
ПКМ - программно-контроллерный модуль; УК - устройства корректировки; ССУП - система стабилизации угла поворота; СТУ - система траекторного управления; РНМ - радионавигационный модуль; ОУ - объект управления; ЛА - летательный аппарат.
Система траекторного управления (СТУ) — бортовая электронная система, предназначенная для формирования и выдачи потребителям управляющих сигналов по крену и тангажу при автоматическом и директорном управлении летательным аппаратом в режиме захода на посадку по сигналам радиомаяков.
Устройство корректировки обеспечивает функциональную корректировку параметров полета, его основой являются инерциальные системы и гироскоп.
Неисправность в работе системы управления авиалайнером, нарушение взаимосвязи между функциональными модулями, приведенными на рисунке 1, может привести к рассогласованию в работе управляющих элементов управления авиалайнером, что в свою очередь приведет к значительным проблемам в характере полета воздушного судна и увеличит нагрузку на оператора неавтоматической системы управления. В этом случае оператору необходимо будет корректировать ошибку рассогласования прямым воздействием на комплексы управления.
Система неавтоматического управления формирует управляющее воздействие, заданное оператором системы. Основным элементами этого модуля являются комплексы и элементы управления лайнером. Основными комплексами управления авиалайнером являются: рули высоты и направления, регуляторы управления параметрами силовой установки, регуляторы управления механизацией крыла, средтсва управления шасси и тормозами. Обратная связь системы управления с оператором обеспечивается посредствам блока индикаторов полетных показателей. Автоматическое управление осуществяется посредствам программ, записанных в программно-контроллерный модуль системы.

Рисунок 2. Элементы управления авиалайнера Boeing-767-300ER
Элементами управления лайнера являются: двигатели, закрылки, хвостовое оперение, элероны, предкрылки, стабилизаторы. Эти элементы управления являются наиболее значимыми, они участвуют в формировании подъемной силы, корректировке движения воздушного судна и стабилизации полета. Так, в процессе предполетной подготовки воздушного судна именно этим элементам уделяется особое внимание. К примеру, в снегопад в аэропорту авиалайнеры проходят противообледенительную обработку для того, чтобы очистить аэродинамические плоскости управления авиалайнером от снега и льда, которые негативно влияют на создание подъемной силы, так же снежная и гололедная нагрузка увеличивает вес авиалайнера, что приводит к повышению риска аварийных ситуаций.
Программно-контроллерный модуль осуществляет автоматическое преобразование сигналов, поступающих на вход микроконтроллера, и посредствам математических и логических преобразований создает более оптимальные варианты корректировки сигнала. Основным элементом этого модуля является микроконтроллер, функциональная схема которого приведена на рисунке 3.

Рисунок 3. Логическое устройство программно-контроллерного модуля
На рисунке 3 обозначены БП - блок питания; CPU – центральный процессор; УК - устройство корректировки сигналов. Основным элементом структуры микроконтроллера является центральный процессор CPU, в него входят три элемента: микропроцессор, память и устройство логической выборки исполнения команд Comm-процессор. Реализация программного кода происходит в микропроцессоре, а результаты выполнения программы хранятся в памяти центрального процессора.
Устройство корректировки обеспечивает функциональную корректировку параметров полета, его основой являются инерциальные системы и гироскоп.
Радионавигационный модуль обеспечивает наиболее безопасное изменение траектории полета, опираясь на текущую локацию. Основой радионавигационного комплекса авиалайнера Boeing-767-300ER является радиоэлектронный пилотажно-навигационный комплекс Garmin-1000, который представляет собой комплексную полнофункциональную информационно-управляющую систему, выполняющую функции навигации полета, автоматизации пилотирования и контроля показателей полета. Структура радиоэлектронного и приборного комплекса представлена на рисунке 4.
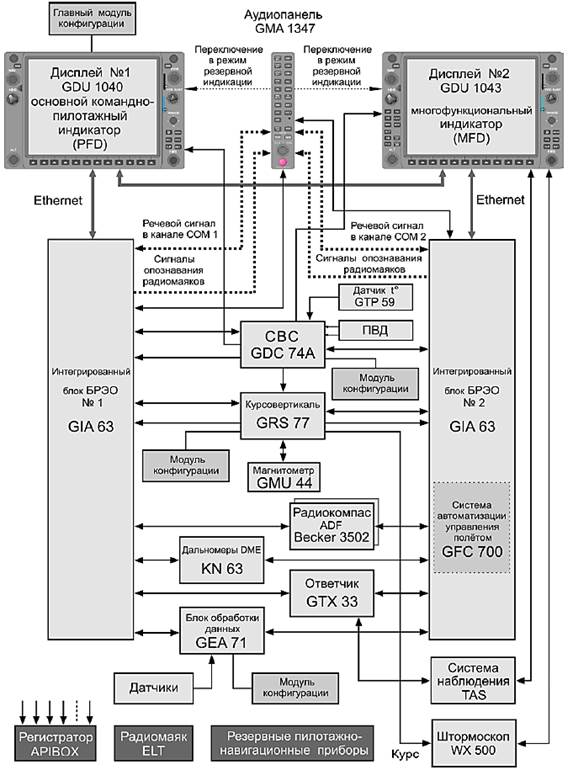
Рисунок 4. Структура радиоэлектронного и приборного комплекса Garmin-1000
В состав радионавигационного комплекса Garmin-1000 входят:
1) система индикации и сигнализации, состоящая из: основного командно-пилотажного индикатора (дисплея) PFD - GDU 1040 №1; многофункционального индикатора (дисплея) MFD - GDU 1040 1043 № 2;
2) система внутренней и внешней связи, состоящая из: аудиопанели GMA 1347 с маркерным радиоприёмником; двух командных радиостанций ОВЧ-диапазона СОМ 1 и СОМ 2;
3) датчики навигационной и пилотажной информации: два приёмоизмерителя системы спутниковой навигации GPS; два комплекта аппаратуры навигации и посадки VOR / ILS; комплект самолётного дальномера фирмы Honeywell KN 63 Remote DME с антенной К А 60; автоматический радиокомпас ADF типа Becker RA-3502 с блоком преобразования Becker АС-3504 и антенной Becker AN-3500; цифровая система воздушных сигналов GDC 74А с приёмниками воздушных давлении и датчиком температуры наружного воздуха GTP 59; курсовертикаль (AHRS) GRS 77 с магнитометром GMU 44;
4) В состав Garmin-1000 также входит самолетный ответчик (транспондер) GTX 33, штормоскоп (грозоотметчик) WX 500 для обнаружения зон грозовой активности и локализации разрядов молний.
Подводя итог сказанного, стоит отметить, что система управления авиалайнером служит для обеспечения полета по заданной траектории путем корректировки траектории полетом посредствам. Использование систем управления полетом играет ключевую роль в мире авиаперевозок. Системы управления полетом не только снизили рабочую нагрузку, но и значительно уменьшили вероятность ошибки.
В настоящее время системы управления стали удобнее и безопаснее. Так, в российском авиалайнере МС-21 установлена одна из самых безопасных, надежных и передовых систем управления fly-bi-wire, что представляет собой глубокую модернизацию системы управления FMS. Основным новшеством системы является использование активных боковых ручек управления, которые совмещают функциональные особенности регулятора параметров и штурвала.
Список литературы:
1. Гусев А.Н. Системы автоматического управления самолетом: Учебное пособие / Самар. гос. аэрокосм. ун-т Самара, 2004. – 138 с.
2. Официальный сайт компании НПЦ «Авиасистемы»: Портал знаний современной авионики – [Электронный ресурс] – Режим доступа: URL: http://npcas.ru/wiki/sistema-samoletovozhdeniya.html (дата обращения 25.10.2022)
3. Рубцов Е.А., Шикавко О.М., Сушкевич Б.А. Радиооборудование воздушных судов и его летная эксплуатация: Учебное пособие / Санкт-Петербургский государственный университет гражданской авиации С.- Петербург, 2016. – 120 с.
