Статья:




АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ
Секция: Технические науки
Выходные данные
Воронова Е.В., Холявко М.Ю. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ // Технические и математические науки. Студенческий научный форум: электр. сб. ст. по мат. LXV междунар. студ. науч.-практ. конф. № 9(65). URL: https://nauchforum.ru/archive/SNF_tech/9(65).pdf (дата обращения: 01.08.2026)
Лауреаты определены. Конференция завершена
Эта статья набрала 0 голосов
Мне нравится0
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников
Дипломы
лауреатов
лауреатов
Сертификаты
участников
участников

LXV Студенческая международная научно-практическая конференция «Технические и математические науки. Студенческий научный форум»
АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ
Воронова Екатерина Владимировна
студент, Санкт-Петербургский государственный университет гражданской авиации имени Главного маршала авиации А.А. Новикова, РФ, г. Санкт-Петербург
Холявко Мария Юрьевна
студент, Санкт-Петербургский государственный университет гражданской авиации имени Главного маршала авиации А.А. Новикова, РФ, г. Санкт-Петербург
Соколов Олег Аркадьевич
научный руководитель, канд. техн. наук, доцент,
Санкт-Петербургский государственный
университет гражданской авиации
имени Главного маршала авиации А.А. Новикова,
РФ, г. Санкт-Петербург
Аннотация. В данной статье рассмотрено, как в настоящее время оптико-электронные системы в настоящее время находят все более широкое применение в системах авиационного оборудования беспилотных летательных аппаратов. Важнейшим измерительным средством в последние годы становятся системы технического зрения, обладающие высокой информативностью.
В статье показан способ определения пространственного и относительного положения беспилотного летательного аппарата относительно взлетно-посадочной полосы для выполнения автоматической посадки.
Ключевые слова: системы технического зрения, инфракрасные ориентиры, обработка изображений, летательные аппараты, навигация, посадка, алгоритм.
Из двух направлений создания системы посадки из соображений сроков разработки предпочтение следует отдать автоматизированному варианту с использованием исключительных характеристик естественного, созданного природой стереоскопического зрения человека и совершенного природного компьютера – человеческого мозга и всей его нервной системы. Предлагаемый авиационный навигатор ГЛОНАСС обеспечит вывод ЛА на посадку, которую будет выполнять пилот по стандартным правилам, пользуясь естественным стереоскопическим зрением, если погодные условия обеспечивают необходимую видимость посадочной полосы ВПП аэродрома или посадочной площадки открытой местности. В этом случае пилот принимает решение о посадке самостоятельно, а в аэропортах – с разрешения диспетчера. В случаях сложных условий видимости (менее 200 м) и при высоте нижней кромки тумана менее 40 м необходимы дополнительные бинокулярные тепловизионные противотуманные видеодатчики ИК-диапазона с длиной волны 8–14 мкм, обеспечивающие техническое стереоскопическое зрение.
Система автоматического управления самолетом при заходе на посадку содержит посадочную радиотехническую систему, включающую в себя связанные через радиоканал наземный глиссадный радиомаяк, бортовой глиссадный радиоприемник и дальномер. Также в системе имеется блок умножения, вычислитель комплексной системы управления и связанные с ним датчики вертикальной перегрузки, угловой скорости тангажа и угла атаки, рулевой привод, интеграторы, сумматоры и фильтр. Система дополнительно содержит взаимосвязанные фильтры, сумматоры, шесть нелинейных блоков, датчик вмешательства летчика в управление самолетом, датчик угла крена, инвертор, двухпозиционный ключ, три блока статических коэффициентов передачи сигналов и датчик вертикальной скорости полета самолета. Достигается повышение помехозащищенности, точности и надежности системы.
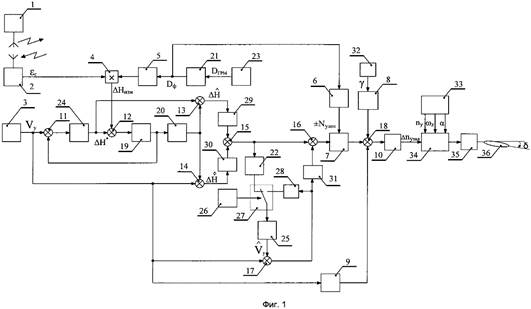
Рисунок 1. Система автоматического управления самолетом
Более высокими характеристиками ветроустойчивости обладает система автоматического управления самолетом при заходе на посадку, в которой в качестве координаты управления используется сигнал вертикальной перегрузки. Но практика эксплуатации самолетов, оснащенных такой системой, выявила ее недостаточную помехозащищенность. Сигнал углового отклонения самолета от глиссады снижения, формируемый существующими посадочными радиотехническими системами (РТС), содержит в себе аддитивную помеху с частотой ≈1 Гц и с амплитудой, доходящей до 10% от максимального уровня полезного сигнала (так называемую «герцовку»). Принципиальная необходимость дифференцирования сигнала отклонения самолета от глиссады снижения в рассматриваемой системе управления приводит к увеличению уровня помех в сигнале заданной перегрузки, требует дополнительных мер по их фильтрации фильтрами с большими постоянными времени, что приводит к ухудшению динамических характеристик процессов управления.

Рисунок 2. Структурная схема системы посадки
Разработанное алгоритмическое обеспечение в бортовом вычислителе позволяет осуществлять поиск, захват, распознавание и сопровождение ИК-ориентиров, вычисление угловых и линейных координат самолета относительно ВПП и формирование заданных значений рассогласования этих координат от линии глиссады в автопилот БЛА для формирования в нем управляющих воздействий . Программная обработка изображений осуществляется с целью определения координат маяков на фотоматрице. Особенностью этой задачи является ее навигационная направленность, и поэтому требования к минимизации погрешностей измерения достаточно высоки. Значительные флуктуации функции яркости изображения, обусловленные шумами фотоматрицы существенно ухудшают метрологические возможности системы технического зрения.
Вычисление навигационных параметров осуществляется путем решения системы шести нелинейных уравнений.

Рисунок 3. Система уравнений
где  – элементы матрицы направляющих косинусов ( A), i −1 3, Κ j −1 3;
– элементы матрицы направляющих косинусов ( A), i −1 3, Κ j −1 3;
ψ – угол рыскания,
υ – угол тангажа,
γ – угол крена; ,
 – координаты геометрического центра объектива; x, y, z – искомые координаты маяка;
– координаты геометрического центра объектива; x, y, z – искомые координаты маяка;  – координаты маяков в горизонтальной системе координат.
– координаты маяков в горизонтальной системе координат.
Математическая модель динамики полета формирует параметры движения БЛА, передает эти данные бортовому автопилоту.
Многофункциональная оптико-электронная система фиксирует положение маяков на экране, вычисляет линейные и угловые координаты положения БЛА относительно ВПП, передает эти данные бортовому автопилоту. Бортовой автопилот в соответствии с заложенным законом управления ведет самолет по глиссаде на посадку.
Для полноценного решения задачи управления полетом БЛА в режиме обеспечения посадки до высоты H = 0 разработан алгоритм автоматического управления, обеспечивающий выдерживание параметров посадки с заданной точностью.
В основу алгоритма автоматического управления положены принципы: иерархического многоуровневого деления полётного задания на этапы полёта, участки и фазы; разделения каналов непрерывного и дискретного управления
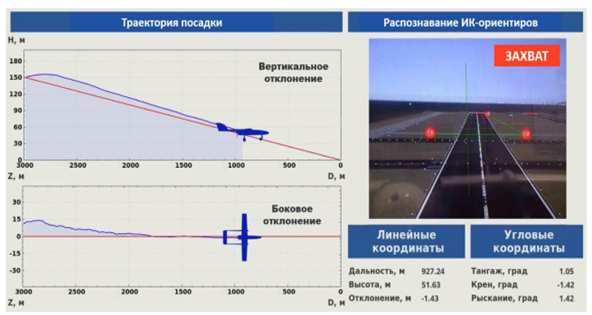
Рисунок 4. Результаты полунатурного моделирования СТЗ с заходом на посадку с дальности D=3000 м, высоты H=150 м
Список литературы:
1. ГОСТ Р 51747-2001 Система инструментального захода летательных аппаратов на посадку летательных аппаратов на посадку сантиметрового диапазона волн радиомаячная. Основные параметры и методы измерений.
2. Логвин А.И. Алгоритмы автоматического распознавания взлетно-посадочной полосы на видеоизображениях / А.В. Волков // Научный вестник - М. : МГТУ ГА. 2015 - № 213. - С. 115-117
3. Визитер Ю.В. Обработка и анализ изображений в задачах машинного зрения / Ю.В. Визитер. - М. : Физматгиз, 2010. - 249 с.
