ПРИМЕНЕНИЕ АВТОНОМНОГО ИНСПЕКЦИОННОГО РОБОТА ДЛЯ ТЕРМОГРАФИЧЕСКОГО И АКУСТИЧЕСКОГО АНАЛИЗА ОБОРУДОВАНИЯ
Конференция: LXXXIV Международная научно-практическая конференция «Научный форум: инновационная наука»
Секция: Технические науки

LXXXIV Международная научно-практическая конференция «Научный форум: инновационная наука»

ПРИМЕНЕНИЕ АВТОНОМНОГО ИНСПЕКЦИОННОГО РОБОТА ДЛЯ ТЕРМОГРАФИЧЕСКОГО И АКУСТИЧЕСКОГО АНАЛИЗА ОБОРУДОВАНИЯ
APPLICATION OF AN AUTONOMOUS INSPECTION ROBOT FOR THERMOGRAPHIC AND ACOUSTIC ANALYSIS OF EQUIPMENT
Madi Tashpentaev
Student, Baishev University, Republic of Kazakhstan, Aktobe
Arsen Arykbayev
Student, Baishev University, Republic of Kazakhstan, Aktobe
Meirambek Burankul
Student, Baishev University, Republic of Kazakhstan, Aktobe
Assel Beresheva
Scientific supervisor, Candidate of Technical Sciences, Associate Professor, Baishev University, Republic of Kazakhstan, Aktobe
Аннотация. Современные промышленные предприятия сталкиваются с необходимостью регулярной диагностики оборудования для предотвращения аварий и простоев. Традиционные методы технического обслуживания часто сопряжены с высокими затратами, рисками для персонала и низкой оперативностью. В данной работе рассматривается применение автономного инспекционного робота, оснащённого средствами термографии и акустического анализа, для автоматизированного мониторинга состояния оборудования. Представлены архитектура системы, алгоритмы обработки данных и результаты экспериментального внедрения в промышленной среде.
Abstract. Modern industrial enterprises face the need for regular equipment diagnostics to prevent accidents and downtime. Traditional maintenance methods often involve high costs, risks for personnel, and low responsiveness. This paper discusses the use of an autonomous inspection robot equipped with thermography and acoustic analysis tools for automated monitoring of equipment condition. The architecture of the system, data processing algorithms and the results of experimental implementation in an industrial environment are presented.
Ключевые слова: автономный робот, термография, акустический анализ, диагностика оборудования, промышленная автоматизация.
Keywords: autonomous robot, thermography, acoustic analysis, equipment diagnostics, industrial automation.
Современные промышленные предприятия сталкиваются с необходимостью регулярной диагностики оборудования для предотвращения аварий и простоев. Традиционные методы технического обслуживания часто сопряжены с высокими затратами, рисками для персонала и низкой оперативностью. В современном производстве применение автономного инспекционного робота, оснащённого средствами термографии и акустического анализа, для автоматизированного мониторинга состояния оборудования является необходимым. Переход к предиктивному техническому обслуживанию требует внедрения интеллектуальных систем мониторинга. Традиционные методы, основанные на ручной инспекции, часто не обеспечивают необходимую точность и своевременность обнаружения дефектов. Особенно актуально это для тепловых и акустических нарушений, которые являются ранними индикаторами неисправностей.
1. Архитектура системы:
Таблица 1.
Аппаратная конфигурация
|
Компонент |
Характеристика |
|
Инфракрасная камера |
Диапазон: - 20°C до +500°C; чувствительность: 0.05°C |
|
Акустические датчики |
Частотный диапазон: 10 Гц – 20 кГц |
|
Навигационные сенсоры |
Лидар, стереокамеры, IMU |
|
Обработка данных |
NVIDIA Jetson Xavier NX, 8 ГБ RAM |
|
Платформа |
Четырёхколёсная мобильная база с дифференциальным приводом |
2. Программное обеспечение
- SLAM-модуль — навигация и картографирование на основе алгоритма ORB-SLAM2;
- Модуль термоанализа — свёрточные нейронные сети (CNN) для анализа тепловых аномалий;
- Акустическая аналитика — преобразование Фурье и спектральная классификация звуковых паттернов с помощью модели SVM.
3. Термография
Анализ тепловых изображений позволяет:
- определить локальные перегревы;
- выявить неравномерность нагрева подшипников и контактов;
- отследить утечки тепла.
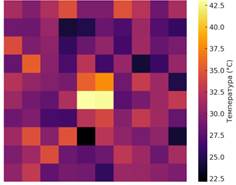
Рисунок 1. Пример тепловой карты с выявленной аномалией (перегрев подшипника)
Звуковой анализ основывается на спектрограммах, формируемых из записей микрофонов и вибросенсоров. На рисунке 2 изображено сравнение спектрограмм исправного и повреждённого редуктор.
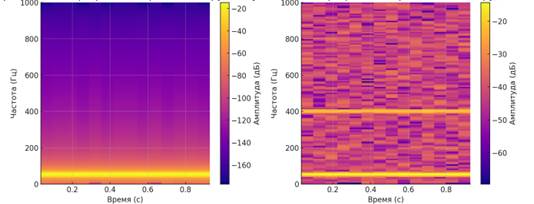
Рисунок 2. Сравнение спектрограмм исправного и повреждённого редуктора
Пилотное внедрение робота было проведено на компрессорной станции крупного нефтехимического предприятия. За 30 дней эксплуатации было зафиксировано 112 сеансов инспекции. В таблице 2 дано сравнение эффективности обнаружения дефектов роботом и вручную.
Таблица 2.
Эффективность обнаружения дефектов
|
Тип дефекта |
Обнаружено вручную |
Обнаружено роботом |
Время предупреждения (сутки) |
|
Перегрев двигателя |
3 |
5 |
4,2 |
|
Нарушение смазки |
1 |
3 |
5,7 |
|
Дефект подшипника |
0 |
2 |
3,1 |
Интеграция термографических и акустических сенсоров позволяет обеспечить комплексную диагностику. Ранняя идентификация дефектов способствует сокращению незапланированных простоев, снижению эксплуатационных затрат и увеличению срока службы оборудования. Применение автономного инспекционного робота с модулями термографии и акустического анализа показало высокую эффективность в условиях промышленной эксплуатации. В перспективе целесообразно:
- расширить алгоритмы ИИ с учётом предиктивной аналитики;
- интегрировать робота в цифровые двойники;
- использовать 5G-связь для оперативной передачи данных.
Преимущества применения автономного инспекционного робота включают высокую точность и объективность диагностики, возможность раннего выявления тепловых и акустических аномалий, снижение влияния человеческого фактора, доступ к труднодоступным зонам, повышение промышленной безопасности, а также интеграцию в цифровые системы мониторинга. Робот способствует снижению эксплуатационных расходов и переходу к предиктивному обслуживанию.
