МОДАЛЬНОЕ УПРАВЛЕНИЕ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ ТЕЛЕЖКИ МОСТОВОГО КРАНА
Конференция: LIV Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Электротехника

LIV Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»

МОДАЛЬНОЕ УПРАВЛЕНИЕ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ ТЕЛЕЖКИ МОСТОВОГО КРАНА
MODAL CONTROL OF ASYNCHRONOUS ELECTRIC DRIVE FOR A TROLLEY OF A BRIDGE CRANE
Alexander Pakhomov
Candidate of Science, associate Professor, Siberian Federal University, Russia, Krasnoyarsk
Pyotr Chertykov
Undergraduate, Siberian Federal University, Russia, Krasnoyarsk
Аннотация. Объектом исследования является система асинхронного электропривода тележки мостового крана с модальным управлением. Предмет исследования – подавление колебаний груза, свободно подвешенного на канате, с применением модального регулятора скорости груза.
Abstract. The object of research in the article is an asynchronous electric drive system of trolley of a bridge crane with modal control. The subject of research is the suppression of fluctuations of the cargo, freely suspended on the rope, using a modal speed regulator.
Ключевые слова: модальное управление; электропривод тележки мостового крана; переходный процесс.
Keywords: modal control; electric drive of trolley of a bridge crane; the process of transition.
Среди современных грузоподъемных механизмов на промышленных предприятиях часто встречается мостовой кран. При перемещении тележки возникает раскачивание подвешенного груза. Порядка 20% времени полного цикла перегрузочных операций затрачивается на ожидание завершения колебаний груза. Кроме того, раскачивание груза приводит к увеличению динамической нагрузки на привод и металлическую конструкцию крана. [2]
В данной статье рассматривается способ подавления колебаний груза при помощи модального управления электропривода перемещения тележки мостового крана.
В качестве объекта исследования рассматривается электропривод перемещения тележки мостового крана с подвешенным грузом. Структурная схема представлена на рисунке 1. Блок «АД» является математической моделью асинхронного двигателя (АД) в декартовой системе координат ![]() , вращающейся со скоростью магнитного поля
, вращающейся со скоростью магнитного поля ![]() , уравнения которой представлены в [1]. В качестве примера в работе взят АД RA250M2 с номинальными значениями мощности
, уравнения которой представлены в [1]. В качестве примера в работе взят АД RA250M2 с номинальными значениями мощности ![]() кВт и частоты вращения ротора
кВт и частоты вращения ротора ![]() об/мин.
об/мин.
Блок «МК» является математической моделью механической части тележки мостового крана [3], которая состоит из тележки с приведенной массой ![]() т и груза массой
т и груза массой ![]() т, подвешенного на канате длиной
т, подвешенного на канате длиной ![]() м.
м.
На структурной схеме приняты следующие обозначения: ![]() и
и ![]() – задание на потокосцепление и скорость ротора АД;
– задание на потокосцепление и скорость ротора АД; ![]() и
и ![]() – коэффициенты обратных связей модального регулятора обеспечивающие стабилизацию потокосцепления ротора АД;
– коэффициенты обратных связей модального регулятора обеспечивающие стабилизацию потокосцепления ротора АД; ![]() ,
,![]() ,
,![]() – коэффициенты обратных связей модального регулятора скорости перемещения тележки
– коэффициенты обратных связей модального регулятора скорости перемещения тележки ![]() , силы, прикладываемой к грузу при его отклонении от вертикального положения
, силы, прикладываемой к грузу при его отклонении от вертикального положения ![]() и скорости груза
и скорости груза ![]() ;
; ![]() и
и ![]() – коэффициенты усиления, обеспечивающие требуемые потокосцепление и скорость перемещения тележки мостового крана при наличии обратных связей; блоки «БК» и «МКР» – блок компенсации перекрестных связей и модель электромагнитного контура ротора АД (рассмотрены в [6]); kП – коэффициент передачи преобразователя частоты;
– коэффициенты усиления, обеспечивающие требуемые потокосцепление и скорость перемещения тележки мостового крана при наличии обратных связей; блоки «БК» и «МКР» – блок компенсации перекрестных связей и модель электромагнитного контура ротора АД (рассмотрены в [6]); kП – коэффициент передачи преобразователя частоты; ![]() – коэффициент АД;
– коэффициент АД; ![]() – КПД редуктора;
– КПД редуктора; ![]() – радиус приведения между скоростью двигателя и скоростью тележки;
– радиус приведения между скоростью двигателя и скоростью тележки; ![]() – коэффициент механической связи между массами тележки и груза;
– коэффициент механической связи между массами тележки и груза; ![]() – cила сопротивления передвижению тележки с грузом;
– cила сопротивления передвижению тележки с грузом; ![]() ,
, ![]() ,
, ![]() – число пар полюсов АД, коэффициент электромагнитной связи и величина задания на потокосцепления ротора АД.
– число пар полюсов АД, коэффициент электромагнитной связи и величина задания на потокосцепления ротора АД.

Рисунок 1. Структурная схема электропривода перемещения тележки мостового крана с модальным управлением
Синтез модального регулятора производится отдельно для двух каналов регулирования: канал регулирования потокосцепления ротора АД с настройкой на модульный оптимум (подробно описан [1]) и канал регулирования скорости тележки мостового крана с настройкой по Баттерворту [5], который рассматривается в настоящей статье.
Система уравнений электропривода перемещения тележки мостового крана в форме Коши имеет вид [3]:
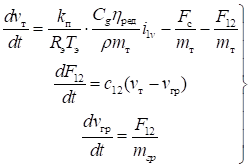 (1)
(1)
На основе системы уравнений (1) можно записать матрицу динамики и входа:
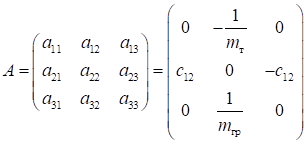 и
и 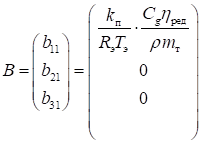 .
.
Характеристический полином замкнутой системы по вектору состояния объекта управления определяется выражением:
![]() , (2)
, (2)
где ![]() – коэффициент модального регулятора;
– коэффициент модального регулятора; ![]() – единичная матрица;
– единичная матрица; ![]() – желаемый характеристический полином.
– желаемый характеристический полином.
Для определения коэффициентов k модального регулятора, обеспечивающих желаемое распределение корней характеристического полинома [1], подставим в (2) выражения матриц динамики и входа:

![]() .
.
Определим коэффициенты ОС при настройке системы по разложению Баттерворта [5]: перерегулирование ![]() %, а относительное время переходного процесса
%, а относительное время переходного процесса ![]()
![]() . Нормированное желаемое уравнение имеет вид:
. Нормированное желаемое уравнение имеет вид:
![]() ,
,
где ![]() ;
; ![]() ;
; ![]() – коэффициенты нормированного уравнения.
– коэффициенты нормированного уравнения.
Приравнивая коэффициенты приведенных двух уравнений при равных степенях ![]() , определяем коэффициенты модального регулятора
, определяем коэффициенты модального регулятора ![]() :
:
![]() ,
, ![]() ,
, ![]() .
.
Переходные процессы скорости груза и тележки приведены на рисунках 2 и 3 соответственно.
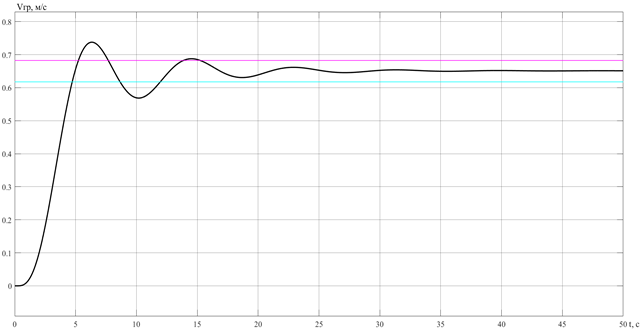
Рисунок 2. Переходный процесс скорости груза замкнутой системы с модальным управлением
В начальный момент времени ![]() подается сигнал задание на потокосцепление ротора АД
подается сигнал задание на потокосцепление ротора АД ![]() . После того как потокосцепление ротора АД достигнет заданного установившегося значения (работа канала регулирования потокосцепления), в момент времени
. После того как потокосцепление ротора АД достигнет заданного установившегося значения (работа канала регулирования потокосцепления), в момент времени ![]() производится скачкообразное изменение задания на скорость
производится скачкообразное изменение задания на скорость ![]() и включается в работу второй канал регулирования.
и включается в работу второй канал регулирования.
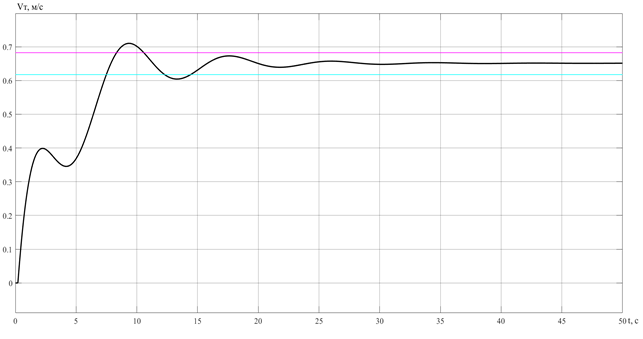
Рисунок 3. Переходный процесс скорости тележки замкнутой системы с модальным управлением
Время и перерегулирование переходного процесса скорости груза составляет ![]() с,
с, ![]() ; скорости тележки
; скорости тележки ![]() с,
с, ![]() . Из графиков видно, что характер переходных процессов близок к теоретически ожидаемому. По сравнению переходных процессов, представленных в работе [4], модальный регулятор обеспечивает эффективное подавление колебаний скорости груза.
. Из графиков видно, что характер переходных процессов близок к теоретически ожидаемому. По сравнению переходных процессов, представленных в работе [4], модальный регулятор обеспечивает эффективное подавление колебаний скорости груза.
