РАЗРАБОТКА БЕСПИЛОТНОГО НАЗЕМНОГО АППАРАТА НА ВОЗДУШНОЙ ПОДУШКЕ
Конференция: XCV Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Транспорт

XCV Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»

РАЗРАБОТКА БЕСПИЛОТНОГО НАЗЕМНОГО АППАРАТА НА ВОЗДУШНОЙ ПОДУШКЕ
DESIGNING OF GROUND UNMANNED VEHICLE BASED ON AIR CUSHION
Zaitsev Yefim Nikolaevich
Cadet, Military Academy of Aerospace Defense named after Marshal of the Soviet Union G. K. Zhukov, Russia, Tver
Yugov Roman Andreevich
Cadet, Military Academy of Aerospace Defense named after Marshal of the Soviet Union G. K. Zhukov, Russia, Tver
Karpov Alexey Pavlovich
Civil personnel, Military Academy of Aerospace Defense named after Marshal of the Soviet Union G. K. Zhukov, Russia, Tver
Аннотация. Проанализированы особенности конструирования беспилотных аппаратов в зоне проведения специальной военной операции. С учетом актуальных проблем, параметров было предложено использование нового решения в данной области. Создана модель беспилотного наземного аппарата на воздушной подушке.
Abstract. This study analyzes the design features of unmanned vehicles within the zone of a special military operation. Considering current challenges and specific parameters, a novel solution for this domain is proposed. A model of an unmanned ground air-cushion vehicle has been developed.
Ключевые слова: беспилотный аппарат, воздушная подушка, давление.
Keywords: unmanned vehicle, air cushion, pressure.
Современные вооружённые конфликты всё чаще характеризуются стремлением к минимизации потерь личного состава, повышению эффективности разведывательно-ударных операций и обеспечению тактического превосходства за счёт технологического преимущества. В этих условиях особую стратегическую значимость приобретают беспилотные системы, позволяющие выполнять широкий спектр боевых и вспомогательных задач без прямого участия человека на передовой.
В условиях активного развития систем РЭБ и оптической разведки, а также повсеместностью распространения применяемых беспилотных систем, противник все чаще имеет возможность определить местонахождение операторов БПЛА. Это ставит под угрозу как жизни личного состава, так и выполнение боевой задачи подразделениями различных уровней. Результатом становится применение БПЛА с дальнего расстояния, что ограничивает эффективность их применения: уменьшает радиус их применения, или управление дронами операторами в условиях, с вероятностью быть ликвидированным средствами поражения противника. Данная проблема является одним из основных препятствий для специалистов по управлению БПЛА, чем и определяется актуальность данной темы.
Выделяют четыре основных типа беспилотных систем, активно применяемых в современных вооружённых столкновениях и перспективные направления данной техники: воздушные (БПЛА), наземные (БПНА), надводные (БПНВА), подводные (БППА).
Выбор остановлен на наземном типе, поскольку, обладая возможностью нести модульное вооружение и оборудование, а также работать в условиях активного противодействия — как огневого, так и электронного; выполнение роли средства обеспечения других аппаратов- их развитие становится одним из ключевых направлений модернизации вооружённых сил, определяя новые тактические подходы и меняя характер ведения боевых действий.
Колесная основа увеличивает скорость передвижения беспилотного аппарата, однако не обеспечивает необходимую проходимость: дрон сможет эффективно передвигаться по дорогам, шоссе, некоторым грунтовым дорогам, что значительно сузит оперативные возможности аппарата. Гусеничная основа обладает значительно большей проходимостью (возможностью преодолевать пересеченную местность, сложный рельеф поля боя), а также большей устойчивостью к переворотам при преодолении преград. Однако данные преимущества равновесны недостаткам конструкции: высокому весу катков и гусениц, высокое энергопотребление такой двигательной системы, а также низкой скорости передвижения БпА. Учитывая преимущества и недостатки вышеуказанных вариантов, было принято решение реализовать принципиально новое для данной сферы решение: использовать воздушную подушку. Прототипом послужили существовавшие до этого малые десантные корабли, построенные на данной основе. Воздушная подушка позволяет развивать скорость, большую, чем у гусеничного хода, поскольку плывет над поверхностью, она способна, в отличие от других вариантов, преодолевать водные препятствия, и, что не менее важно, пробираться над минно-взрывными заграждениями.
Судно на воздушной подушке работает по принципу создания области высокого давления между днищем судна и поверхностью – водой, землёй, льдом и т.д. Это позволяет судну парить над поверхностью, значительно снижая сопротивление движению и обеспечивая высокую проходимость. С помощью вентиляторов или компрессоров воздух нагнетается под корпус судна. По периметру корпуса устанавливаются гибкие юбки, обычно из прочной резины или синтетических материалов, которые удерживают воздух под судном и позволяют сохранять подушку даже на неровной поверхности. Когда давление под корпусом становится достаточным, оно поднимает судно над поверхностью на высоту от нескольких сантиметров до метра, в зависимости от конструкции. В этом состоянии судно не касается поверхности, что резко снижает, и, практически убирает трение. Для перемещения используются отдельные движители – это могут быть воздушные винты, водные винты или реактивные двигатели. Направление движения регулируется с помощью рулей направления или изменением угла наклона движителей. Некоторые модели используют аэродинамическое крыло для дополнительной подъёмной силы на высоких скоростях (по материалам источника [2]).
Рассмотрим различные виды воздушных подушек по способу создания давления под днищем. Камерная схема формирования воздушной подушки применяется на судах на воздушной подушке и характеризуется подачей воздуха непосредственно в полость подушки через шахты или каналы с большой площадью сечения, за частую напрямую от вентилятора (рис. 1а). Благодаря значительному поперечному сечению этих каналов, воздух поступает в подушку с относительно низкой скоростью, что минимизирует реактивные силы и исключает их влияние на стабильность судна. В данном типе подъёмная сила создаётся исключительно за счёт статического давления воздуха, удерживаемого внутри замкнутой или полузамкнутой полости под днищем корпуса. Является самым простым, однако весьма энергозатратным способом, поскольку воздух свободно покидает воздушную подушку, из-за чего происходит ее проседание, потеря стабилизации.
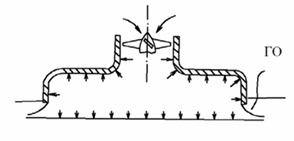
а) б)
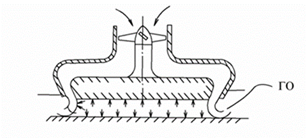
Рисунок 1. Типы воздушной подушки: а) камерный; б) сопловый
В сопловой системе юбка представляет собой эластичную манжету без внутренних перегородок (рис. 1б). Воздух подаётся под корпус судна и выходит наружу через узкую щель (сопло) между нижним краем юбки и поверхностью. Давление поддерживается за счёт постоянного притока воздуха, компенсирующего его утечку через это сопло. Такая конструкция проще, легче и дешевле в производстве, обеспечивает плавный ход на ровных поверхностях. Однако при движении по сильно пересечённой местности или при резких кренах сопловая юбка значительно теряет давление из-за широкого сопла, что требует использования более мощных двигателей, приводит к большим энергозатратам (по материалам источника [1]).
Устройство беспилотного наземного аппарата на воздушной подушке
В реализованном устройстве (рис. 2) использован камерный тип воздушной подушки, что обусловлено необходимостью низкого веса конечной конструкции, сохранения малых габаритов. Учитывая специфику выполняемых задач, а также ограничения по массогабаритным составляющим, выбор пал на пенопласт, который обладает такими важными качествами как: устойчивость к воздействию влаги, неподверженность гниению, легкий вес, простота обработки.

Рисунок 2. Модель беспилотного наземного аппарата
Элементы крепления моторов, вертикальная стойка для направляющего винта, купола нагнетающих винтов выполнены из пластика по технологии 3D печати на принтере, что значительно повышает точность при изготовлении, снижает себестоимость, позволяет изготовить прочные и легкие изделия. Имеется поддержка следующих датчиков: акселерометр/гироскоп (6 степеней свободы), высокоточный барометр, GPS-модуль. Беспилотный аппарат способен управляться с помощью оптоволоконного кабеля.
Платформа имеет гладкие углы для уменьшения воздушного сопротивления и два отверстия для монтажа двух двигателей.
Двигатели обладают высокой мощностью (490 Вт), тягу более чем 1000 грамм, оснащены валом из нержавеющей стали, бескислородную медную обмотку для лучшей проводимости. Их преимущество заключается в надежности, хорошей теплоотдаче, оптимальном соотношении мощности и веса и универсальности применения в различных типах аппаратов.
Аккумулятор CNHL Black: обладает емкостью в 3000 мАч при компактном размере и небольшой массе в 266 грамм.
Полетный контроллер Ardupilot: благодаря своей многофункциональности, надежности и гибкости является отличным выбором для данного БПНА, так как позволяет настроить независимую работу и привязать к пульту управления три винта: направляющего и двух нагнетающих воздух. Помимо этого, аппарат сможет функционировать в одном из двух режимов: полуавтономном режиме и ручном режиме. Основными функциями являются: стабилизация полета; удержание высоты; передвижение к позиции с помощью GPS и камеры; автоматическая посадка.
Имеющаяся модель прошла первичные испытания, в ходе которых были выявлены ошибки при расчете конструкции беспилотного аппарата, в связи с этим, было принято решение о создании новой конструкции, имеющей большую грузоподъемность, доработанные механизмы поворота и управления аппаратом, на уровне расчетов уменьшен масштаб проблемы низкой стабилизации дрона при проезде над воронками, глубокими ямами, за счет создания резервной камеры с воздухом для компенсации потери давления в подушке.
