Система электропривода тележки грузоподъемного крана с модальным управлением
Конференция: XLIII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Электротехника

XLIII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Система электропривода тележки грузоподъемного крана с модальным управлением
ELECTRIC DRIVE SYSTEM OF LOAD-LIFTING CRANE TRUCK WITH MODAL CONTROL
Evgeniya Bryukhanova
Student, Siberian federal university, Russia, Krasnoyarsk
Alexander Pakhomov
Candidate of Engineering Science, associate Professor, Siberian Federal University, Russia, Krasnoyarsk
Аннотация. В статье рассмотрены различные варианты построения системы электропривода тележки грузоподъемного крана с модальным управлением. Основной целью разработки таких систем является необходимость ограничения колебаний груза при перемещении тележки.
Abstract. The article considers various options for constructing an electric drive system of a load-lifting crane truck with modal control. The main purpose of developing such systems is the need to limit the fluctuations of the load when moving the truck.
Ключевые слова: электропривод; грузоподъемный кран; колебания груза; модальный регулятор; переходный процесс.
Keywords: electric drive; load-lifting crane; load oscillations; modal regulator; transient process.
На промышленных предприятиях широко распространены подъемно-транспортные механизмы, в число которых входят мостовые краны. Перемещение тележки грузоподъемного крана сопровождается раскачиванием подвешенного груза. Образование колебаний приводит к нарушению безопасной работы в результате возможных ударов груза с конструкцией крана или другими производственными объектами. Многие технологические процессы требуют ограничения на амплитуду возникающих колебаний, что требует снижения скорости транспортировки грузов. Из-за этого длительность позиционирования значительно увеличивается ввиду необходимости успокоения груза. Все это приводит к снижению производительности грузоподъемного крана и повышению энергопотребления [2, 4].
В данной статье рассматриваются несколько вариантов построения системы электропривода тележки грузоподъемного крана с модальным управлением, широко используемого в многомассовых системах с упругими связями [1], с целью ограничения колебательных процессов при перемещении подвешенного груза.
В качестве объекта исследования рассматривается электропривод механизма перемещения тележки мостового крана с подвешенным грузом. Структурная схема объекта исследования представлена на рисунке 1.

Рисунок 1. Структурная схема системы электропривода механизма перемещения тележки мостового крана с модальным управлением
Математическая модель объекта управления составлена в соответствии с методикой, приведенной в [3]. Механизм состоит из тележки, с приведенной массой mт = 133,5 т, на которой установлен двигатель постоянного тока Д-814 мощностью 55 кВт. Груз массой mгр = 150 т подвешен на канате длиной h = 30 м.
На рисунке 1 введены следующие обозначения: v* – заданное значение скорости груза vгр; eп,kп и Tп – ЭДС, коэффициент и постоянная времени силового преобразователя; rя, Tя, С – активное сопротивление, электромагнитная постоянная времени якорной цепи и конструктивная постоянная двигателя; r – радиус приведения между скоростью двигателя и скоростью тележки vт; Fтр – сила трения при движении тележки; Q = mгр*g/h – коэффициент механической связи между тележкой и грузом, где g – ускорение свободного падения; F12 – горизонтальная составляющая усилия, прикладываемая к грузу при его отклонении от вертикального положения; k1-k5 – коэффициенты модального регулятора; s – оператор Лапласа.
Синтез модального регулятора электропривода перемещения тележки выполняется методом стандартных коэффициентов с настройкой на модульный оптимум [5]. При этом желательно выполнять условие ki> 0, что соответствует отрицательным обратным связям, которые обеспечивают определенную робастность системы, т. е. пониженную чувствительность к изменениям параметров объекта управления [6].
Переходный процесс изменения скорости перемещения груза vгр показан на рисунке 2 при скачкообразном изменении задающего сигнала v* = 10 м/с на входе замкнутой системы электропривода. Выполнение указанного условия ki>0 для выбранного объекта управления возможно при работе замкнутой системы с достаточно высоким быстродействием (время переходного процесса tпп = 0,15 с), при этом график переходного процесса скорости тележки (рисунок 3) изменяется по колебательному закону с очень большой амплитудой, невозможной и недопустимой при практической реализации.
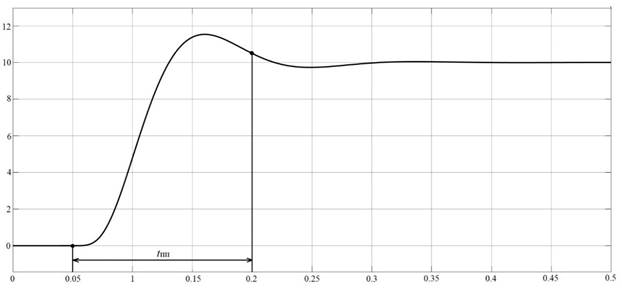
Рисунок 2. Переходный процесс скорости груза замкнутой системы с модальным управлением с полным набором обратных связей
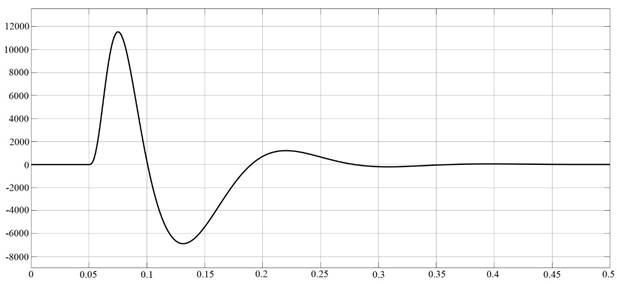
Рисунок 3. Переходный процесс скорости тележки замкнутой системы с модальным управлением с полным набором обратных связей
Следовательно, необходимо снизить быстродействие замкнутой системы, что невозможно при полном наборе обратных связей ввиду сравнительно небольших постоянных времени Tп и Tя по сравнению с постоянными времени инерционной механической части системы.
Пренебрежение малыми постоянными времени (Tп ≈ 0 и Tя ≈ 0) позволяет понизить порядок системы (количество обратных связей становится меньше, что уменьшает число коэффициентов ki – редуцированный модальный регулятор) и одновременно обеспечить снижение быстродействия системы до уровня tпп = 1,3 с (рисунок 4) и амплитуды колебаний скорости тележки (рисунок 5).
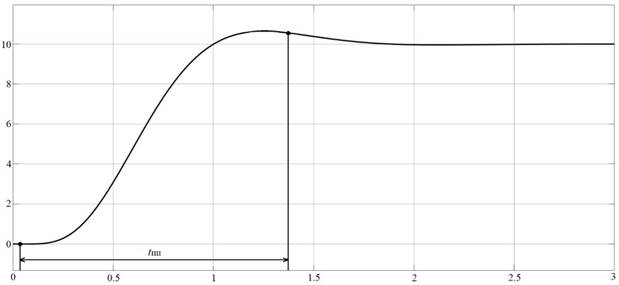
Рисунок 4. Переходный процесс скорости груза замкнутой системы с модальным управлением с редуцированным модальным регулятором

Рисунок 5. Переходный процесс скорости тележки замкнутой системы с модальным управлением с редуцированным модальным регулятором
Проведенный анализ систем электропривода с модальным управлением и различным набором обратных связей позволяет сделать следующие выводы:
1. Для уменьшения колебаний груза необходимо использовать обратную связь по скорости груза. Ввиду возникающих трудностей практической реализации измерения скорости груза часто используют методику синтеза регуляторов электропривода, предполагая «жёсткую» связь между тележкой и грузом. При этом скорость перемещения груза будет иметь явно выраженный колебательный характер, амплитуда колебаний которых затухает медленно из-за незначительного сопротивления воздуха при раскачивании груза [2]. Поэтому, обратную связь по скорости груза рекомендуется реализовывать с помощью наблюдающих устройств [5].
2. Для практической реализации модального управления желательно использовать редуцированный регулятор, обеспечивающий уменьшение числа датчиков (коэффициентов обратных связей), снижение колебаний груза и ограничение амплитуды колебаний скорости тележки. Следует отметить, что в случае необходимости обеспечения ограничения тока до максимально-допустимого значения обратную связь по току можно оставить без существенных качественных изменений характеристик замкнутой системы.
