Особенности применения квадрокоптеров в оптической атмосферной системе связи с подвижными объектами
Конференция: XXXII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Радиотехника и связь

XXXII Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»

Особенности применения квадрокоптеров в оптической атмосферной системе связи с подвижными объектами
FEATURES OF USING QUADROCOPTERS IN THE OPTICAL ATMOSPHERIC COMMUNICATION SYSTEM WITH MOBILE OBJECTS
Boris Kuzyakov
Candidate of physical and mathematical Sciences, Associate Professor, Russian Technological University MIREA, Russia, Moscow
Аннотация. В наше время, квадрокоптеры широко применяются во многих сферах науки и техники, включая системы связи. Рассмотрены варианты «активной» и «пассивной» ретрансляции с применением квадрокоптеров. Приведены параметры ряда серийных квадрокоптеров. Показаны преимущества «пассивной» ретрансляции. Рассмотрены вопросы необходимой конфиденциальной связи между автомобилями в колоннах и схемы повышения её надежности. В одной из них, использована современная система позиционирования на базе видеокамеры. Приведен вариант системы обработки видеоинформации.
Abstract. Nowadays, quadrocopters are widely used in many fields of science and technology, including communication systems. Variants of "active" and" passive " retransmission using quadrocopters are considered. The parameters of a number of serial quadrocopters are given. The advantages of "passive" retransmission are shown. The issues of necessary confidential communication between cars in columns and schemes for improving its reliability are considered. One of them uses a modern positioning system based on a video camera. A variant of the video information processing system is presented.
Ключевые слова: Оптическая связь; ретрансляция сигналов; колонны автомобилей; квадрокоптер; лазер; флуктуации; отражатель зеркального типа; система позиционирования; обработка видеоинформации.
Keyword: Optical communication; signal retransmission; vehicle columns; quadrocopter; laser; fluctuations; mirror-type reflector; positioning system; video information processing.
В оптических атмосферных системах связи перспективны варианты ретрансляции сигналов [3, с. 150] с применением квадрокоптеров. При размещении приемо-передающих модулей на квадрокоптере, систему часто называют «активной». При размещении на квадрокоптере отражателя, например, зеркального типа [4, с. 34], система считается «пассивной». На рис. 1 показан общий вид грузового квадрокоптера (ГКР), среднего класса, у него имеется специальный грузовой держатель и 8 пропеллеров.

Рисунок 1. Общий вид ГКР
В варианте «активной» ретрансляции с размещением 1 передатчика и 1 приемника системы АОЛС на коптере, суммарный вес аппаратуры ретрансляции, на базе модулей «БОКС», оказывается, как минимум, ~ 20 кг. В наше время, в парке предлагаемых квадрокоптеров, имеются модели с требуемыми параметрами, часть из них приведена в Таблице.
Таблица
Параметры моделей ГРП
|
Пп. |
Модель |
Максим. груз, кг |
Стоимость* |
|
1 |
MATRICE 600 PRO |
6 |
300 т.р. |
|
2 |
SteadDroneQU4DX |
8 |
460 т.р. |
|
3 |
Freefly ALTA 8 |
12,5 |
700 т.р. |
|
4 |
Versadrones Heavy |
12,5 |
800 т.р. |
|
5 |
Airborg H8 10K |
15 |
1400 т.р. |
|
6 |
Aerones drone |
100 |
≥ 5000 т.р. |
|
7 |
DJI МРР |
0,2 |
6 т.р. |
|
8 |
SYMА |
0,1 |
3,5 т.р. |
* Стоимости приведены ориентировочные, т.к. получены на основе анализа информации СМИ по договорным ценам на ГКР, которые выпускаются малыми сериями и в разных модификациях.
Данные, приведенные в таблице, показывают, что стоимость ГКР, существенно выше, чем «легких» коптеров (см. пп. 7, 8) и в сильной мере зависит от грузоподъёмности. На некоторые модели цены, вообще, не указываются и все уточняется при конкретном заказе на покупку выбранного ГКР. Большинство видов ГКР – мультикоптеры, используются конструкции с 6-ю, 8-ю и более пропеллерами. Некоторые из них снабжены специальными держателями и/или съемными захватами грузов. Имеющаяся информация в СМИ и данные Таблицы, показывают, что ГКР с максимальной грузоподъемностью 15 кг, реализованы несколькими фирмами и имеются на рынке. Однако, оценка массы «активного» ретранслятора, с использованием модулей «БОКС», несколько превышает эту величину и, следовательно, и его стоимость.
В «пассивной» системе, с зеркальными отражателями (рис. 2) на коптере, вес полезной нагрузки существенно снижается и могут использоваться коптеры «легкого» типа. При этом, стоимость системы снижается более, чем на 2 порядка, что подтверждает её преимущества. Варианты зеркальных отражателей показаны на рис. 2.
а) 
 б)
б)
Рисунок 2. Варианты зеркальных отражателей: а) плоский круглый отражатель; б) плоский эллиптический отражатель
При использовании зеркал с металлическим напылением [6, с. 211], коэффициент отражения может быть выше 97%, а при использовании многослойных диэлектрических зеркал, коэффициент отражения может превышать 99% [ 1, с. 126].
При движении автомобилей в колоннах, как гражданских, так и военных, между ними необходима конфиденциальная связь. Система АОЛС с ретрансляцией сигналов с помощью квадрокоптера, в условиях сильно пересеченной местности, приведена на рис. 3.
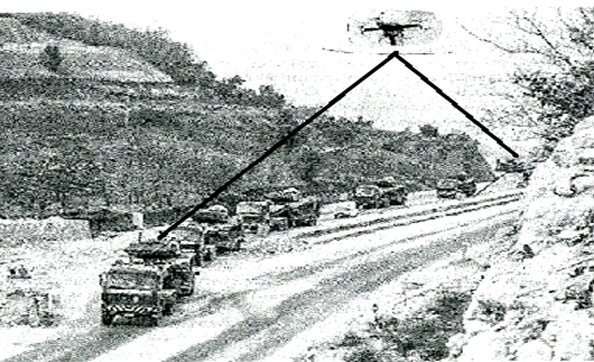
Рисунок 3. Система АОЛС с ретрансляцией сигналов с помощью квадрокоптера
На рис. 3 видно, что условие «прямой видимости» между выделенными автомашинами, не выполняется. Для реализации высокоскоростной связи, на по- мощь приходит ретрансляция с использованием квадрокоптера. Проведенные экспериментальные исследования, показали, что наименьшие флуктуации угла наклона лазерного излучения, с отражателем зеркального типа, могут быть реализованы на «легком» квадрокоптере DJI Mavic Pro Platinum. Нужно отметить, что на трассах протяженностью ~ 60 - 80 м, диаметр лазерного излучения в системах АОЛС, в плоскости приемника, как правило, не превышает 30 - 40 см. Несмотря на относительно малую расходимость лазерного излучения, высокоскоростная связь в колонне, может быть реализована за счет установки приёмников излучения, например, на крышу кабины каждого автомобиля. При этом, расстояние между автомашинами в схеме: передатчик – приемник, можно определить несколькими способами. 1) Использование видеокамеры на самом квадрокоптере. На крыше каждого авто наносят его порядковый номер в колонне. В колоннах обычных авто, как правило, жестко поддерживают дистанцию между машинами, например, 10 - 12 м, не говоря о военных колоннах. Длина каждого авто в колонне, так же известна с точностью до единиц см. Тогда расстояние между, например, авто №2 и авто №28, с использованием информации от камеры коптера, и зная его высоту над колонной, находится из простых геометрических формул. 2) Для повышения надежности связи могут быть использованы, недавно разработанные [5, с. 3], современные системы позиционирования с использованием видеокамеры [2, с. 4436] и габаритных огней автомашины (рис. 4).
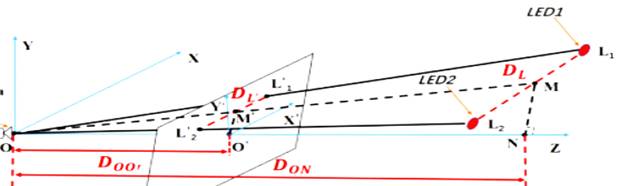
Рисунок 4. Система позиционирования с использованием видеокамеры на тестовой автомашине (слева, в середине) и габаритных огней автомашины – экрана (справа, в 2-х плоскостях, на 2-х расстояниях)
Габаритные огни автомашины, расстояние до которой измеряется, обозначены (L1`, L2`) - на расстоянии DOO` и (L1 , L2) - на расстоянии DON , соответственно, от центра камеры на тестовой автомашине. Расстояние DON вычисляется из геометрических соотношений [7, с. 735]. При этом, разница в длинах между задними габаритными огнями автомашины - экрана - DL`, DL, на соответствующих расстояниях, определяется в пикселях видеокамеры с высокой точностью [8, с. 4523]. Вариант схемы [9, с. 27] обработки изображений видеокамеры, используемой в измерительной системе рис. 4, показан на рис. 5.
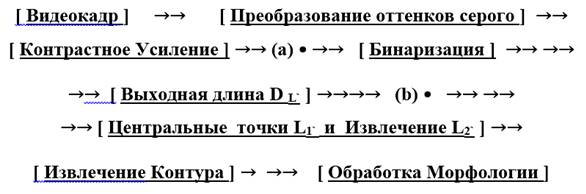
Рисунок 5. Вариант схемы обработки изображений
Здесь, обозначения выходной длины и базовые точки [10, с. 959] соответствуют их обозначениям на рис. 4.
Краткие выводы. 1) Малые изменения углов наклона лазерного излучения в открытом пространстве и в помещении, при использовании лазерного излучателя и зеркального ретранслятора, носят случайный характер. 2) Для реализации высокоскоростной конфиденциальной связи в колоннах автомашин применима ретрансляция в «пассивных» и «активных» системах, с использованием квадрокоптеров, с совершенной стабилизацией.
