Концепция когнитивного радара
Конференция: XXXVI Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»
Секция: Информатика, вычислительная техника и управление

XXXVI Международная научно-практическая конференция «Научный форум: технические и физико-математические науки»

Концепция когнитивного радара
THE CONCEPT OF COGNITIVE RADAR
Alexander Nepryaev
Сhief specialist, Research Institute Centerprogramsystem, Tver, Russia
Andrey Shpigar
Head of Laboratory, Research Institute Centerprogramsystem, Tver, Russia
Аннотация. В статье рассматриваются необходимость применения когнитивной системы управления для многофункциональной радиолокационной станции с активной фазированной антенной решёткой. Дается определение когнитивной радиотехнической системы, основанной на цикле восприятия-действия. Показано, в каких аспектах работы радара наиболее целесообразно применение когнитивного подхода для получения наиболее выгодных эксплуатационных преимуществ.
Abstract. This paper describes some key ideas and applications of cognitive radars, highlighting the limits and the path forward. Cognitive radars are systems based on the perception-action cycle of cognition that sense the environment, learn from it relevant information about the target and the background, then adapt the radar sensor to optimally satisfy the needs of their mission according to a desired goal. The objective of the study was to find out criteria why to determine radar as cognitive.
Ключевые слова: когнитивный радар; адаптивная система управления; радиотехническая система; цикл восприятия-действия.
Keywords: cognitive radar systems; adaptive radar; radar, cognition.
Введение
Сложность и изменчивость радиолокационной обстановки при наблюдении быстро перемещающихся радиолокационных объектов и необходимость адаптации к ней, требуют разработки сложных многофункциональных многоканальных радиолокационных станций (МРЛС) с активной фазированной антенной решёткой (АФАР). Электронное сканирование в двух плоскостях в совокупности с системами цифровой обработки информации, позволяют обеспечить непрерывный обзор пространства, обнаружение, распознавание, наведение средств противовоздушной обороны и сопровождение целей в реальном времени.
Программно-алгоритмическое обеспечение, решающее задачи организации и обслуживания радиолокационных объектов является одним из наиболее сложных элементов многоканальных МРЛС. Включает, но не ограничивается такими компонентами, как: управление работой системы, формирование диаграммы направленности, первичную (спектральную) обработку, обнаружение радиолокационных объектов и оценка их параметров, вторичную (траекторную) обработку поступающей информации, распознавание объектов и ситуаций, анализ складывающейся радиолокационной обстановки и адаптацию к условиям функционирования системы.
Постоянное совершенствование тактико-технических характеристик средств воздушно-космического нападения (СВКН), диктуют необходимость разработки и применения организационно-технических систем (ОТС) управления обладающих когнитивными свойствами.
Когнитивный радар
Когнитивный радар (КР) [1] это радиотехническая система, использующая технологию, которая позволяет системе получать знания об оперативной обстановке, географических условиях, установленных алгоритмах распределения ресурсов и внутреннем состоянии, динамически и автономно корректировать свои эксплуатационные параметры и протоколы в соответствии с полученными знаниями для достижения заранее определенных целей и учиться на полученных результатах. По сравнению с адаптивным радаром, КР учится адаптировать рабочие параметры, а также параметры обработки и может планировать свою работу на более длительные периоды времени.
На (рис. 1) представлена концепция когнитивной радиосистемы [2]. Стрелками показан поток информации между функциями КР. Окружающая среда включает в себя поступающую радиолокационную информацию, команды от других технических систем и человека-оператора.
Внутреннее состояние, содержит информацию, о правилах распределения ресурсов между задачами радара и параметры зондирования.
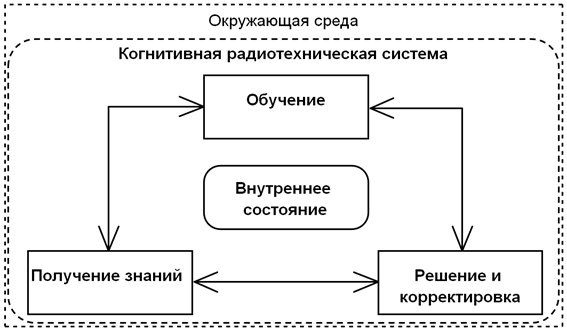
Рисунок 1. Концепция когнитивной радиосистемы
КР получает информацию об окружающей обстановке, внутреннем состоянии и после предварительной обработки её в знания использует в процессе обучения и адаптации. Процесс обучения сравнивает полученную информацию с результатами предыдущих решений и накапливает ее для оптимизации принятия будущих решений. Для поддержания непрерывного процесса обучения используется информация из ранее принятых решений и корректировок, доказавших свою эффективность в процессе взаимодействия с внешней средой. Несколько методов обучения могут быть реализованы, например, путем генерации новых правил. В дальнейшем полученные результаты обучения способствуют получению знаний. Обучение может быть облегчено, как с помощью загрузки априорных знаний заданных проектировщиком, так и с помощью программного обеспечения, которое включает в себя новую логику для будущих решений. Принятие и корректировка решений осуществляется с использованием алгоритмов и стратегий, основанных на знаниях об окружающей среде и внутреннем состоянии когнитивной радиосистемы, а также информации, полученной в процессе обучения о прошлых решениях и степени их успешности.
Цикл обработки когнитивных сигналов
Когнитивный радар и среда, в которой он работает, представляют собой замкнутую систему обратной связи. КР инициирует необходимое действие, например, излучение зондирующего сигнала. Этот сигнал на входе приёмника представляет собой уже смесь полезного сигнала и различного рода шумов, помех, клаттерных отражений и переотражений. Принятый сигнал анализируется системой обработки сигналов, чтобы извлечь данные об окружающей среде, которые могут быть объединены с априорными знаниями и информацией от других датчиков, как бортовых, так и удаленных. Цель состоит в том, чтобы создать понимание критических компонентов окружающей среды. Исходя из этого «восприятия», система способна рассуждать относительно последующих действий.
Этот повторяющийся процесс, называемый «цикл обработки когнитивных сигналов» [3], представляет собой радиолокационную версию человеческих когнитивных принципов, которая в контексте человеческого познания называется «цикл восприятия-действия» (ЦВД), (рис. 2). ЦВД, наряду с четырьмя другими характеристиками памяти (или обучения), внимания, интеллекта и языка, являются основой современной когнитивной науки с точки зрения характеристики необходимых компонентов познания и играют центральную роль в классификации признаков когнитивного радара.

Рисунок 2. Цикл восприятия-действия
Потенциальные эксплуатационные преимущества
Отслеживание большого количества целей является дорогостоящим с точки зрения имеющихся временных, вычислительных и энергетических ресурсов. Если нехватка вычислительных ресурсов может быть компенсирована за счет постоянно совершенствующихся и одновременно усложняющихся современных вычислительных средств, энергетических — за счет совершенствования инженерно-конструкторских решений построения приемо-передающих модулей, то в отношении временных ресурсов, единственным способом является наиболее эффективное их использование в рамках решения конкретных задач [4].
Применение когнитивного подхода в системе управления ресурсами МРЛС может решить проблему нехватки временных ресурсов следующими способами.
Менеджер сопровождения целей [5] планирует время выдачи задания на обновление траектории цели таким образом, чтобы обеспечить требуемую точность её определения.
Применение когнитивного подхода может уменьшить частоту выдачи заданий на обновление траектории, без ухудшения качества и количества сопровождаемых целей, как за счет априорных знаний заложенных проектировщиком, так и приобретенных, за счет самообучения в процессе функционирования.
К априорным знаниям относятся: географическая карта, план местности, климатическая обстановка, предполагаемые пути, траектории и типы целей, расположение источников помех и техногенных объектов, правила комплексирования радиолокационной информации в условиях согласованного взаимодействия нескольких РЛС[6].
К приобретенным знаниям относятся: идентифицированные по радиолокационно-дальностным портретам цели [7], приоритеты (степени опасности) целей [8], приоритетные направления и секторы обзора, оцененные параметры движения платформы МРЛС [9], типы и места расположения средств РЭП и помехопостановщиков, параметры передатчика.
Также к знаниям, получаемым в процессе работы можно отнести отслеживаемые в реальном времени уровни занятости временных, энергетических и вычислительных ресурсов, которые необходимы для долгосрочного планирования задач радара. Работа в жестком реальном времени всех компонентов системы управления МРЛС, вполне обоснованно, может определять степень выраженности его когнитивных способностей.
Способность когнитивного радара адаптировать определенные эксплуатационные характеристики, может быть использована для:
- предотвращения перехвата его сигнала [10] (обнаружение излучения и измерение параметров) приемниками радиоэлектронной разведки. К таким характеристикам можно отнести ширину основного лепестка и уровень боковых, уровень импульсной мощности излучения, ширину спектра излучаемого сигнала, количество излучаемых радиолокационных импульсов.
- повышения помехоустойчивости и противодействия средствам РЭБ за счет между-импульсной перестройки несущей частоты зондирующего сигнала.
Функции оператора РЛС
Продолжающаяся тенденция на применение робототехнических комплексов специального, военного и двойного назначения [11] с интеллектуальным системам управления МРЛС, приводят к тому, что все больше функций человека-оператора становятся автоматизированными. Прежде всего это оправдано тем, что способность оператора реагировать на изменения воздушно-помеховой обстановки значительно снижается [12], при напряженной работе в замкнутом пространстве, условиях психофизиологического напряжения и широком спектре обязанностей [13, 14]. Увеличение объема, разнородности и скорости обработки радиолокационной информации (РЛИ), а также повышения требований к надежности работы и качеству обработки информации человеком оператором, возможно только при длительной и дорогостоящей подготовке и конкурсном отборе. Однако, не смотря на эти меры, человек-оператор практически не способен обеспечивать корректную обработку РЛИ при большом количестве наблюдаемых объектов.
В когнитивном радаре система управления обеспечивает реагирование на резко изменяющуюся обстановку, обработку РЛИ, контроль технических параметров, передачу (трансляцию) команд и информации другим системам и лицам принимающим решения, таким образом, что решения, ранее принимаемые человеком оператором должны быть выполнены с помощью программных средств, что особенно важно в режиме многоцелевого отслеживания.
Выводы
Основные направления развития когнитивного радара:
- повышение степени адаптивности, обучаемости и увеличения горизонта планирования при условии выполнения всех процессов в жестком реальном времени.
- перенос когнитивных функций оператора в автоматизированные процессы радиолокационной системы.
- поиск новых путей повышающих качество принятия решений с учетом особенностей управления объектом в быстроменяющейся внешней среде. Одним из которых может быть применение принципа целенаправленного поведения когнитивных ОТС, которые потенциально позволит снизить долю неопределенности в ситуациях принятия решений в ситуациях быстро меняющейся помехо-целевой обстановки.
