Разработка имитационной модели улично-дорожной сети города Екатеринбурга в среде anylogiс
Журнал: Научный журнал «Студенческий форум» выпуск №11(104)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №11(104)
Разработка имитационной модели улично-дорожной сети города Екатеринбурга в среде anylogiс
Аннотация. Тема научной работы посвящена исследованию имитационной модели улично-дорожной сети города Екатеринбурга, с последующей оптимизацией светофорных объектов.
В работе учитываются геометрические особенности исследуемой улично-дорожной сети, а именно (радиус поворота, длина пути, геометрическая форма транспортного узла).
Для моделирования движения транспортных средств учитываются особенности поведения транспортах потоков, например: скорость транспортных средств, интенсивность, вероятность поворота транспортных средств на различные направления.
Ключевые слова: имитационное моделирование, конфликтные точки, оптимизация, улично-дорожная сеть, anylogic, optquest
Исследуемая улично-дорожная сеть является важным транспортным узлом города Екатеринбурга, т.к. соединяет крупные производственные, спальные и центральные районы города.
На данный момент времени УДС включает в себя несколько видов транспорта: рельсовый (трамваи), автомобильный (преимущественно легковые автомобили, а также автобусы, маршрутки), большой поток пешеходного трафика.
Модель УДС по Екатеринбургу состоит из следующих пересечений улиц: проспект Космонавтов – улиц Челюскинцев, Мамина – Сибиряка, Луначарского, Восточной, Смазчиков, как показано на рисунке 1 (рисунок сделан с помощью Яндекс карт).

Рисунок 1. Карта местности для имитационного исследования по городу Екатеринбургу
В имитационной модели города Екатеринбурга улично-дорожной сети автотранспортные средства обладают следующими геометрическими и скоростными характеристиками, характеристики демонстрирует таблица 1
Таблица 1.
Характеристика транспортного потока
|
параметр |
Значение параметра |
Единицы измерения |
|
Длина |
4 |
метр |
|
Начальная скорость |
60 |
км/ч |
|
Предпочитаемая скорость |
60 |
км/ч |
|
Макс. ускорение |
1,8 |
м/с2 |
|
Макс. торможение |
4,2 |
м/с2 |
Определяем количество различных видов конфликтных точек, на перекрестке проспекта Космонавтов – улиц Челюскинцев, Мамина-Сибиряка
Для определения числа конфликтных точек использовали формулу (1).
m=n0+3∙nc+5∙nn (1)
где, n0 – количество точек по типа «Отклонение»;
nc – количество точек по типа «Слияние»;
nn – количество точек по типа «Пересечение»;
Сначала определим количество конфликтных точек каждого типа.
Количество конфликтных точек на перекрёстке проспекта Космонавтов – улиц Челюскинцев, Мамина-Сибиряка демонстрирует рисунок 2; красным цветом обозначены точки пересечения, зеленым цветом отклонение, черным цветом слияние. Для пересечения улиц Челюскинцев – Восточной показывает рисунок 3.

Рисунок 2. Количество конфликтных точек на проспекте Космонавтов –улиц Челюскинцев, Мамина-Сибиряка
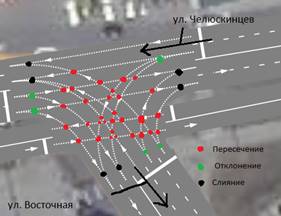
Рисунок 3. Количество конфликтных точек улиц Челюскинцев – Восточной
В таблице 2 приведены количество точек каждого типа на пересечении улиц: пр. Космонавтов – улиц Челюскинцев, Мамина – Сибиряка (рисунок 2) и улиц Челюскинцев, Восточной (рисунок 3).
Таблица 2.
Количество конфликтных точек
|
Название улицы |
Тип конфликтных точек |
Количество конфликтных точек |
|
проспекта Космонавтов – ул. Челюскинцев – ул. Мамина-Сибиряка |
Слияние |
12 |
|
Отклонение |
13 |
|
|
Пересечение |
65 |
|
|
ул. Челюскинцев – ул. Восточная |
Слияние |
6 |
|
Отклонение |
5 |
|
|
Пересечение |
31 |
Оценка сложности участков приведена в таблице 3 с указанием уровня сложности организации движения на перекрестках соответствующих УДС.
Таблица 3.
Оценка сложности перекрестков
|
Название улицы |
Общее количество кон. точек |
Уровень сложности |
|
проспекта Космонавтов – улиц Челюскинцев, Мамина-Сибиряка |
374 |
Участок является очень сложным
|
|
улиц Челюскинцев, Восточной |
178 |
Участок является очень сложным |
Интерфейс управления УДС представлен на рисунках 4 и 5, 6 и состоит из следующих управляемых значений (окна ввода): изменение интенсивности транспортных средств, в час (на 5-ти направлениях), изменение длительности разрешающих и запрещающих сигналов светофора.
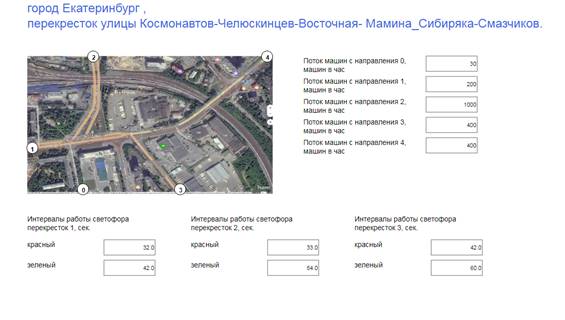
Рисунок 4. Интерфейс управления имитационной моделью
Первоначальные данные интенсивности и плотности движения следующие:
Поток машин с направления 0: 30 авт./ч.
Поток машин с направления 1: 200 авт./ч.
Поток машин с направления 2: 1000 авт./ч.
Поток машин с направления 3: 400 авт./ч.
Поток машин с направления 4: 400 авт./ч.
Интервалы работы светофоров соответствуют следующим значениям:
Интервалы работы светофора на перекрестке 1: зеленый свет, длительность 42 секунды, красный 32 секунды.
Интервалы работы светофора на перекрестке 2: зеленый свет, длительность 84 секунды, красный 33 секунды
Интервалы работы светофора на перекрестке 3: зеленый свет, длительность 60 секунды, красный 42 секунды
Результаты работы имитационной модели представлены на рисунках 5, 6.

Рисунок 5. Имитационная модель (вид сверху)
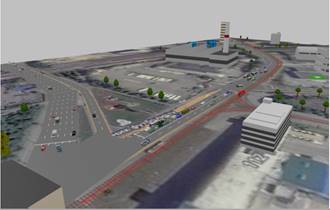
Рисунок 6. Имитационная модель (вид с камеры)
Имитационная модель адекватно работает, общественный транспорт, а именно автобусы, трамваи осуществляют выгрузку и посадку пассажиров. Легковой и средний транспорт осуществляют движение согласно заданным вероятностям. Датчики определяют количество ТС по направлениям. Светофоры осуществляют контроль трафиков.
Для осуществления оптимизации будет использоваться программа OptQuest.
Внешний вид интерфейса программы оптимизатора представлен на рисунке 7.
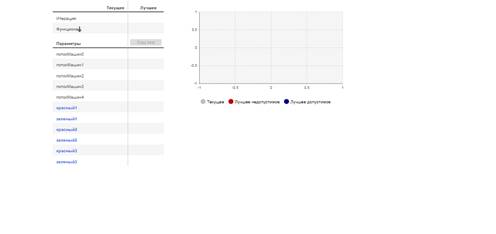
Рисунок 7. Внешний вид программы
Основные параметры оптимизации указаны в таблице 4. Количество итераций 500.
Таблица 4.
Параметры оптимизации
|
Параметр |
Тип |
Значение |
||
|
Мин. |
Макс. |
Шаг |
||
|
ПотокМашин0 |
фиксированный |
30 |
– |
– |
|
ПотокМашин1 |
фиксированный |
200 |
– |
– |
|
ПотокМашин2 |
фиксированный |
1000 |
– |
– |
|
ПотокМашин3 |
фиксированный |
400 |
– |
– |
|
ПотокМашин4 |
фиксированный |
400 |
– |
– |
|
Красный1 |
дискретный |
20 |
60 |
1 |
|
Зеленый1 |
дискретный |
20 |
120 |
1 |
|
Красный2 |
дискретный |
20 |
60 |
1 |
|
Зеленый2 |
дискретный |
20 |
120 |
1 |
|
Красный3 |
дискретный |
20 |
60 |
1 |
|
Зеленый13 |
дискретный |
20 |
120 |
1 |
Результат работы программы представлен на рисунках 8, 9.
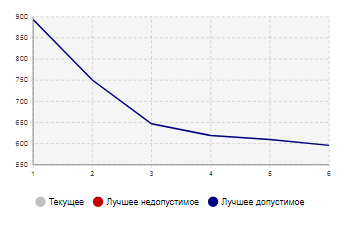
Рисунок 8. Начальный этап оптимизации

Рисунок 9. Завершающий этап оптимизации
Результатами являются оптимизированные значения длительности красного (запрещающего) и зеленого (разрешающего) сигналов светофора, также в таблицах 5 и 6 приведены дополнительные данные показывающие работу оптимизатора.
Таблица 5.
Результаты работы оптимизатора
|
События в секунду |
36,841 |
|
Кадров в секунду |
60 |
|
Шаг |
47,591 |
|
Реальная длительность выполнения эксперимента |
1122,29 |
Таблица 6.
Оптимальные значения длительности фаз
|
Наименование параметра |
Текущее |
Лучшее |
|
Итерация |
107 |
48 |
|
Функционал |
741,195 |
347,283 |
|
Красный1 |
32 |
57 |
|
Зеленый1 |
24 |
55 |
|
Красный2 |
58 |
51 |
|
Зеленый2 |
41 |
110 |
|
Красный3 |
59 |
34 |
|
Зеленый3 |
20 |
54 |
Применим полученные результаты на имитационной модели, и определим пропускную способность.
Добавим в окна ввода полученные во время эксперимента данные, как показано на рисунках 10 и 11.
Осуществим анализ полученных с датчиков результатов.
Поток машин не изменялся, вероятности поворотов также не изменялись.

Рисунок 10. Ввод полученных данных

Рисунок 11. Завершение имитационного моделирования
Всего затрачено 3600 секунд имитационного времени. Результат во время применения оптимизационных значений по направления 2 прошло 525 автомашин в час, в предыдущем опыте 500 автомашин в час. Вывод количество пропускаемых машин в час увеличилось на 25 автомашин в час.
