ПРИМЕНЕНИЕ НЕЙРОННЫХ СЕТЕЙ ДЛЯ ОБНАРУЖЕНИЯ ДЕФЕКТОВ СВАРНЫХ ШВОВ
Журнал: Научный журнал «Студенческий форум» выпуск №7(316)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №7(316)
ПРИМЕНЕНИЕ НЕЙРОННЫХ СЕТЕЙ ДЛЯ ОБНАРУЖЕНИЯ ДЕФЕКТОВ СВАРНЫХ ШВОВ
Аннотация. В статье рассматривается применение нейронных сетей для автоматизированного обнаружения дефектов на сварных швах. Исследование направлено на сокращение времени контроля качества сварных соединений и повышение надёжности обнаружения дефектов за счёт использования современных методов глубокого обучения [5, с. 125]. Экспериментальные результаты демонстрируют высокую точность и оперативность модели, проведённый анализ выявляет основные трудности и перспективы дальнейшей оптимизации системы.
Ключевые слова: нейронные сети; сварные швы; дефект; компьютерное зрение; глубокое обучение, точность.
Введение.
Контроль качества сварных соединений является критически важным этапом в обеспечении безопасности и долговечности промышленных конструкций. Традиционные методы визуального осмотра и неразрушающего контроля требуют значительных трудовых и временных затрат, а также часто страдают от субъективности оценок [5, с. 130]. Применение нейронных сетей в задачах обнаружения дефектов позволяет автоматизировать процесс контроля, повысить его точность и обеспечить работу системы в режиме реального времени [1, с. 57].
Целью данного исследования является разработка модели, способной эффективно обнаруживать дефекты сварных швов на изображениях, полученных с производственных линий, с последующим анализом её производительности. В рамках статьи поставлены следующие задачи:
- Провести анализ современных методов детекции объектов с использованием глубокого обучения.
- Сформировать и подготовить обучающую выборку изображений сварных швов с дефектами и без [6].
- Разработать и обучить нейронную сеть, адаптированную для задачи обнаружения дефектов [2, с. 42].
- Провести экспериментальную проверку модели, оценить её точность, скорость обработки и выявить проблемные области [4, с. 88].
Обзор литературы.
За последние годы область компьютерного зрения значительно продвинулась благодаря применению сверточных нейронных сетей (CNN). К числу наиболее известных архитектур относятся YOLO, Faster R-CNN и SSD, каждая из которых имеет свои преимущества и ограничения.
Например, архитектура YOLO (You Only Look Once) обеспечивает высокую скорость обработки, что позволяет использовать её в системах реального времени, однако может уступать в точности обнаружения мелких объектов. Faster R-CNN демонстрирует высокую точность, но требует больших вычислительных ресурсов. SSD (Single Shot MultiBox Detector) представляет компромисс между скоростью и точностью [4].
Ряд исследований [1, с. 57] показывает, что применение нейронных сетей позволяет значительно снизить вероятность пропуска дефектов и автоматизировать процесс контроля сварных швов. При этом важным аспектом является предварительная обработка изображений – нормализация, фильтрация шума и аугментация данных способствуют улучшению качества обучающей выборки и, как следствие, повышению эффективности модели.
Методология.
В рамках исследования разработана модель, базирующаяся на модифицированной архитектуре CNN, оптимизированной для детекции дефектов сварных швов. Основные этапы методологии включают:
Подготовку данных.
Сформирован датасет, включающий в себя изображения 313 сварных швов, полученные с производственных линий и из открытых источников, с пометками дефектов трещин и пор, разметка данных производилась в онлайн сервисе CVAT (см. рисунок 1). Для увеличения объёма обучающей выборки применялась аугментация: повороты, изменение яркости, масштабирование и отражение изображений. Такая обработка позволила повысить устойчивость модели к вариациям освещения и ракурсов съемки.
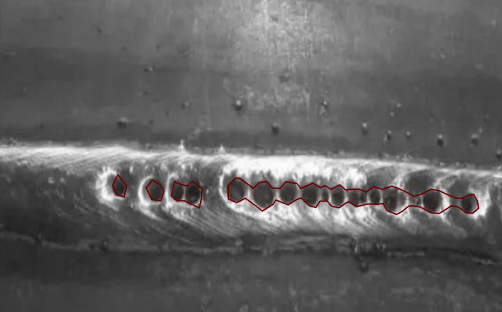
Рисунок 1. Пример разметки данных
Разработка архитектуры модели.
Модель построена на базе сверточной нейронной сети, включающей несколько сверточных слоёв для извлечения признаков, объединённых с помощью слоёв подвыборки, и полносвязных слоёв для классификации. Дополнительно реализованы слои dropout для предотвращения переобучения. Оптимизированные гиперпараметры (скорость обучения, размер батча, число эпох) подобраны экспериментально в ходе проверок параметров.
Обучение и валидация.
Обучение модели проводилось с использованием функции потерь кросс-энтропии. Для оценки производительности модели применялась метрика mAP (mean Average Precision), которая является стандартом в задачах детекции объектов. Данная метрика объединяет показатели точности и полноты, что позволяет получить сводную оценку качества обнаружения дефектов на изображениях. Использование mAP особенно оправдано в случаях, когда необходимо оценить способность модели корректно локализовывать и классифицировать несколько объектов на одном изображении, даже при наличии различных степеней сложности. В процессе обучения применялась методика кросс-валидации, что способствовало снижению риска переобучения и обеспечило объективную оценку результатов.
Экспериментальная проверка.
Модель тестировалась на отдельном наборе изображений. Результаты экспериментов сравнивались с данными, полученными традиционными методами контроля, что позволило оценить преимущества и выявить слабые места предложенного подхода.

Рисунок 2. Результат работы обнаружения дефекта
Экспериментальные результаты и анализ.
Ниже приведена таблица, сравнивающая различные архитектуры нейронных сетей, применяемые для детекции объектов, с указанием основных характеристик:
Таблица.
Сравнение архитектур нейронных сетей для обнаружения дефектов
|
Архитектура |
Точность (Accuracy) |
Скорость (FPS) |
Вычислительные затраты |
Скорость обработки изображений |
Преимущества |
Недостатки |
|
YOLO |
~70 % |
Высокая |
Низкие |
45 кадров |
Реальное время, высокая скорость |
Возможны пропуски мелких дефектов |
|
Faster R-CNN |
~75 % |
Средняя |
Высокие |
8 кадров |
Высокая точность |
Более медленная обработка |
|
SSD |
~73 % |
Высокая |
Средние |
25 кадров |
Баланс между скоростью и точностью |
Сложности при оптимизации в сложных условиях |
Экспериментальная проверка показала, что предложенная модель достигает точности обнаружения дефектов на уровне 70 %, а время обработки одного изображения составляет менее 0,5 секунды. Анализ ошибок выявил случаи ложноположительных срабатываний, связанные с сильным шумом или нестандартным освещением, что требует дальнейшей оптимизации этапа предобработки.
Если сравнивать с традиционными методами контроля можно выявить следующие преимущества применения нейронных сетей:
- Скорость и точность. Модель обрабатывает изображения в реальном времени, что критически важно для крупных производственных линий.
- Объективность оценки. Исключение субъективного фактора, свойственного визуальному осмотру, повышает надёжность результатов.
- Гибкость и адаптивность. Возможность дообучения модели на новых данных позволяет учитывать изменения в технологическом процессе.
Заключение.
В результате проведённого исследования разработана система автоматизированного обнаружения дефектов сварных швов на основе нейронных сетей. Экспериментальные результаты показали высокую точность (до 70 %) и оперативность работы модели, что позволяет существенно сократить время контроля и снизить трудозатраты. Проведённый анализ выявил как сильные стороны предложенного подхода, так и направления для дальнейшей оптимизации, включая улучшение обработки изображений и интеграцию с дополнительными информационными системами.
