ПРИМЕНЕНИЕ НЕЧЕТКОГО КОНТРОЛЛЕРА В ЛОКАЛЬНОМ ПЛАНИРОВЩИКЕ РОБОТА-КУРЬЕРА
Журнал: Научный журнал «Студенческий форум» выпуск №13(364)
Рубрика: Технические науки

Научный журнал «Студенческий форум» выпуск №13(364)
ПРИМЕНЕНИЕ НЕЧЕТКОГО КОНТРОЛЛЕРА В ЛОКАЛЬНОМ ПЛАНИРОВЩИКЕ РОБОТА-КУРЬЕРА
Аннотация. Была рассмотрена целесообразность применения нечёткого контроллера в системах, ориентированных на построение локальной траектории. Проведён обзор существующих локальных планировщиков, применяемых в динамических средах в робототехнике. Разработана модель робота в среде с динамическими препятствиями на базе алгоритмов семейства VO(velocity obstacle). Проведен сравнительный анализ работы классического и модифицированного алгоритмов.
Ключевые слова: Локальный планировщик, нечёткий контроллер, динамические препятствия, навигация, velocity obstacle, Optimal Reciprocal Collision Avoidance, VO, ORCA.
Введение: Актуальность данной работы обусловлена ростом применения автономных мобильных роботов, в динамических средах с высокой неопределённостью. Современные автономные мобильные роботы находят широкое применение в задачах доставки и обслуживания, в частности в виде роботов-курьеров, функционирующих в городской и индустриальной среде. Особенностью таких робототехнических систем является необходимость работы в условиях высокой динамичности окружающего пространства, наличия пешеходов, подвижных объектов и временных препятствий. Управление движением робота в подобных условиях требует не только строгого соблюдения требований безопасности, но и обеспечения высокой оперативности выполнения задач. В таких условиях эффективность функционирования робототехнических систем напрямую связана со способностью алгоритмов локального планирования траектории обеспечивать безопасное и оперативное движение при наличии подвижных препятствий и постоянно изменяющейся обстановки[1]. Таким образом разработка новых и модификация уже существующих алгоритмов построения локальной траектории нечёткой логикой позволяют повысить надёжность, скорость маневрирования и как следствие практическую применимость, что при решении задач связанных с перемещением грузов автономными роботами[2].
Постановка задачи: Модифицировать существующий алгоритм локального планирования пути нечётким контроллером для повышения интеллектуальности системы, провести сравнительный анализ скорости работы оригинального и модифицированного алгоритмов.
Основные идеи данной работы можно выразить следующими пунктами:
- «Умное» построение локальной траектории. Большая часть существующих локальных планировщиков рассматривает окружающих робота агентов как обезличенные препятствия или вводит минимальную классификацию вида «свой/чужой» в случае группового управления. Это накладывает ограничения на возможности алгоритмов, которые строят локальную траекторию или выбирают новую скорость для робота. В свою очередь добавление нечеткого контроллера позволит ввести простой по вычислениям фильтр, который будет учитывать при планировании только те динамические препятствия, столкновение с которыми может наступить.
- Понижение стоимости вычислений. Все алгоритмы локального планирования, которые будут рассмотрены в этой работе, вынуждены высчитывать потенциальное движение динамических препятствий для обеспечения безопасного движения, либо имеют простейший фильтр, отсекающий все препятствия на определённом расстоянии и накладывающие ограничения на количество соседних агентов. Это в свою очередь не позволяет учитывать дальние объекты, движущиеся с большой скоростью к роботу и отсекать близкие, но движущиеся от робота. Таким образом, введение умного фильтра позволит сохранить безопасность на достаточном уровне, понизив стоимость вычислений.
Локальные планировщики
Методы локального планирования можно отнести к нескольким семействам, а именно:
- Методы на основе потенциальных полей
- Методы на основе гистограмм направлений
- Методы пространств скоростей
- Методы локального поиска.
1. Потенциальные поля
Методы на основе потенциальных полей представляют собой один из наиболее интуитивных подходов к локальному планированию траекторий. В основе этого семейства лежит аналогия с физическими силами: робот рассматривается как пробная частица, движущаяся под воздействием искусственного потенциального поля[3]. В каждый момент времени планировщик строит скалярную функцию потенциала в конфигурационном пространстве, эта функция представляет собой сумму притягивающей составляющей и отталкивающей составляющей, которая резко возрастает при приближении к препятствиям. Управляющий сигнал формируется на основе вычисления градиента суммарного поля. Робот движется в направлении антиградиента, «скатываясь» в глобальный минимум, соответствующий цели.
Преимущества: Вычислительная эффективность и простота реализации. Для работы не требуется глобальной карты, достаточно локальных данных с сенсоров. Реакция на препятствия происходит плавно и в реальном времени. Кроме того, результирующее движение выглядит естественно и не содержит резких разрывов траектории.
Недостатки: Наиболее серьезным недостатком является возможность попадания в локальный минимум, робот может остановиться в тупике или не найти прохода между двумя препятствиями, не достигнув цели. Помимо этого у робота могут возникать колебания при движении. Метод не учитывает неголономные ограничения робота в своей базовой форме, что требует дополнительных модификаций для реальных мобильных платформ[4].
2. Гистограммы направлений
Семейство методов, известное как VFH (Vector Field Histogram) и его вариации (VFH+, VFH*), фокусируется на анализе плотности препятствий вокруг робота. В отличие от потенциальных полей, которые оперируют непрерывными силами, гистограммные методы дискретизируют пространство вокруг робота для принятия решений о направлении движения. Это подход, ориентированный на надежное обнаружение проходов между препятствиями. Робот строит локальную гистограмму заполненности пространства, затем пространство разбивается на сектора и для каждого сектора вычисляется «плотность препятствий». Далее алгоритм строит бинарную гистограмму, выделяя сектора, где плотность ниже порога. Из множества открытых секторов выбирается тот, чье направление минимально отличается от желаемого направления к цели, при этом обеспечивается достаточная ширина прохода для робота[5].
Преимущества: Основное преимущество - высокая надежность в сильно заставленных средах. Методы гистограмм отлично справляются с проездом через узкие проходы, так как явно оценивают ширину свободного пространства. Они менее склонны к колебаниям, чем потенциальные поля, поскольку решение принимается на основе статистически агрегированных данных гистограммы, а не локального градиента.
Недостатки: Гистограммные методы не учитывают динамику робота и кинематические ограничения на этапе выбора направления. Это может приводить к ситуации, когда выбранное направление физически недостижимо для робота с данной скоростью[6].
3. Пространства скоростей
Семейство методов, известное как DWA (Dynamic Window Approach), оперирует не позиционным планированием, а планирование скоростей. Эти алгоритмы были разработаны специально для учета кинематики и динамики реальных мобильных роботов. Суть заключается в использовании пространства управляющих параметров, а не декартовых координат. Алгоритм выполняет поиск в пространстве допустимых скоростей[7]. Сначала определяется динамическое окно - множество пар линейной и угловой скоростей, которых робот может физически достичь за ближайший временной интервал, учитывая его ограничения по ускорению. Затем для каждой пары скоростей из этого окна симулируется траектория движения на коротком временном горизонте. Каждая симулированная траектория оценивается целевой функцией, которая обычно включает три компонента: продвижение к цели, расстояние до ближайшего препятствия и величину скорости.
Преимущества: Ключевое преимущество DWA и его аналогов - физическая реализуемость траекторий. Поскольку поиск ведется в пространстве допустимых ускорений, генерируемые траектории гарантированно выполнимы для конкретной модели робота. Метод обеспечивает плавное движение, естественное торможение перед препятствиями и эффективную навигацию в динамических средах, так как перепланирование происходит на каждом такте с учетом текущей скорости.
Недостатки: DWA является «жадным» локальным методом, который видит только ближайшую перспективу. Это делает его подверженным попаданию в локальные ловушки, из которых невозможно выбраться без глобального планировщика. Вычислительная сложность растет с увеличением размерности пространства управлений, что ограничивает применение метода для роботов со сложной кинематикой например, манипуляторы с несколькими степенями свободы[8].
4. Локальный поиск
Данное семейство объединяет алгоритмы, которые рассматривают задачу локального планирования как задачу оптимизации на графе или дереве состояний в ограниченной области вокруг робота. В отличие от аналитических методов, поисковые методы дискретизируют конфигурационное пространство и используют эвристики для нахождения пути. К этой группе относятся локальные версии алгоритмов A*, Dicstra и Rapidly-exploring Random Trees (RRT), адаптированные для работы в ограниченном локальном окне. Вместо работы с непрерывным полем сил или пространством скоростей, методы локального поиска строят дискретное представление локальной окрестности робота. Алгоритм создает граф, покрывающий область вокруг текущего положения. Узлы графа представляют возможные состояния, а ребра - допустимые перемещения между ними. Затем на этом графе запускается поиск и найденный путь обрезается до первого управляющего воздействия, после чего процесс повторяется.
Преимущества: Эти методы обеспечивают высокую гибкость и способность находить оптимальные в рамках локального окна пути, обходя сложные конфигурации препятствий. Они естественным образом учитывают неголономные ограничения через структуру ребер графа и не подвержены попаданию в локальные минимумы на подпространстве.
Недостатки: Основным недостатком является вычислительная ресурсоемкость. Построение графа и запуск поиска на каждом такте управления требует значительно больше вычислительных мощностей по сравнению с аналитическими методами. Размер локального окна является критическим параметром: слишком маленькое окно не позволяет видеть обходные пути, слишком большое приводит к потере реактивности и росту времени расчета[9][10].
Реализация планировщика с нечётким контроллером
По итогам рассмотрения существующих планировщиков был выбран алгоритм на базе DWA относящийся к модифицированному методу VO(velocity obstacle), а именно Optimal Reciprocal Collision Avoidance (ORCA). Его специфика учитывает распределение ответственности по избеганию столкновения между агентами таким образом, что выбор скорости будет осуществляться исходя из предположения, что динамическое препятствие также будет избегать столкновение. Подобного рода допущение логично с точки зрения группового управления и в средах, где агенты выбирают свою траекторию исходя из окружающей динамической среды.
Основой, вокруг которой строился нечёткий контроллер, стали его вход и выход. Необходимо было выбрать, какие параметры несут решающее значение в рамках определения уровня опасности препятствия. Так как сама суть выбора метода заключается в необходимости снижения вычислительных затрат, очевидно, что при выборе скорости должны учитываться только те из препятствий, столкновение с которыми может произойти в ближайшем будущем. Выбор должен обеспечивать минимально возможные вычисления, но при этом оставаться безопасным и не допускать столкновения. В качестве метрик были выбраны:
- Относительная скорость
- Расстояние
- Угол пересечения скоростей
- Класс объекта
Следует отметить, что на вход контроллера подавались классы в виде числовой последовательности, идея этого подхода заключается в том, что водители индивидуального транспорта двигаются по прямой значительно чаще, чем животные. Это позволяет предположить, что в качестве класса можно подавать число в диапазоне от 1 до 4, где наименьшее число будет отражать наибольшую вероятность прямолинейного движения. Примером такой последовательности примем следующее соотношение: {1:индивидуальный транспорт, 2:человек, 3:животное, 4:неопознаный объект}.
Машина из этого ряда исключена по причине включения её в критерии остановки. Таким образом, на вход контроллеру подавался вектор вида:
Oi = {Vi, di, φi, С}
По итогам работы контроллер выдавал значение – оценку опасности объекта, которое в последствии округлялось до булево. Препятствия признанные «опасными» учитывались при построении конусов скоростей во время работы ORCA, «безопасные» отбрасывались. Пример среза правил при угле скорости в 90° и её значении в 7 км/ч представлен на рисунке 1.
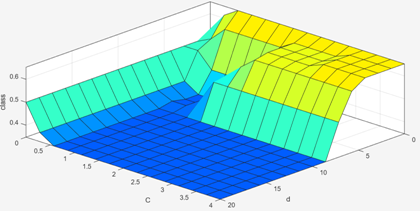
Рисунок 1 Срез контроллера по классу и расстоянию для объекта с относительной скоростью 7 км/ч движущегося перпендикулярно роботу
Проведение сравнительного анализа
Сравнение работы оригинального и модифицированных алгоритмов проводилось при помощи изменения количества двигающихся перпендикулярно роботу агентов. Траектории всех агентов пересекали траекторию робота в различных местах. Однако не от всех агентов необходимо было уклоняться. В качестве критерия сравнения работы методов была выбрана скорость их работы. Измерялось среднее количество шагов симуляции в единицу времени (1 секунда). Примеры работы симуляций представленны на рисунке 2.
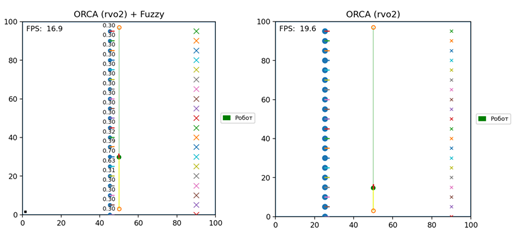
Рисунок 2. Демонстрация работы симуляции с нечетким контроллером и без
По итогам были составлены графики, которые представлены на рисунке 6. Оба графика отражают падение скорости алгоритма при увеличении количества агентов. Стоит отметить, что уровень проработки модифицированного ORCA ниже оригинального, в дальнейшем планируется ввести векторизацию параметров, передаваемых в нечёткий контроллер, за счёт чего ожидается повышение скорости работы модифицированного метода. При их изучении можно сделать вывод, что существенные различия в производительности наступают только при пересечении порога в 40 наблюдаемых агентов.
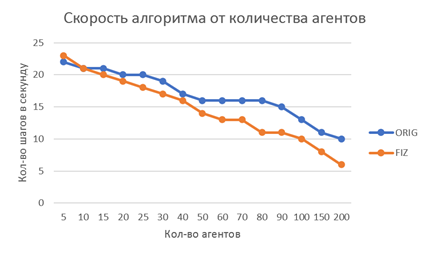
Рисунок 3. Результаты тестирования оригинального и модифицированного ORCA
Заключение В ходе выполнения работы была обоснована актуальность применения нечёткого контроллера в составе локального планировщика автономного робота-курьера, функционирующего в динамической среде с высокой неопределённостью. Несмотря на то, что анализ показал небольшое отставание модифицированного алгоритма от оригинального в средах с большим количеством агентов, сама идея «умного» планирования в динамической среде является перспективной в рамках решения задачи локальной навигации. В дальнейшем данная идея получит реализацию в макете с применением модифицированного алгоритма в целевой среде, по итогам которого можно будет сделать вывод о успешности интеграции нечёткой логики в алгоритмы планирования.
