Метод определения местоположения беспроводной базовой станции на основе триллатерации
Журнал: Научный журнал «Студенческий форум» выпуск №5(98)
Рубрика: Физико-математические науки

Научный журнал «Студенческий форум» выпуск №5(98)
Метод определения местоположения беспроводной базовой станции на основе триллатерации
Современный мир тяжело представить без Wi-Fi сетей, благодаря таким достоинствам как: отсутствие проводов, высокой мобильности, дешевизна установки и владения.
Ежедневно количество точек доступа Wi-Fi неуклонно растет, но не смотря на этот положительный аспект, количество уязвимостей, связанных с ними также увеличивается.
По данным «Лаборатории Касперского» в мире существует огромное множество незащищенных и ненадежных точек доступа [1].
Одной из актуальных угроз является создание поддельных точек Wi-Fi для перехвата, модификации сетевых данных.
Значимость данной угрозы обусловлена простотой реализации, а также так называемой «неосведомленностью» людей, которые при подключении к открытым Wi-Fi точкам в кафе, аэропорту и так далее, даже не догадываются о возможных опасностях, ведь злоумышленнику не составит труда просмотреть трафик этого пользователя и использовать эти данные в корыстных целях.
По рассмотренной теме существует ряд решений [2-6]: проводится анализ 6 способов определения точек доступа Wi-Fi, а также математическая модель и программная реализация одного из них [2], рассмотрены методы определения координат, позволяющие определять местоположение мобильных клиентов по радиосигналу хорошо развитой в крупных городах инфраструктуры Wi-Fi точек [3], рассказывается о теоретической составляющей способах позиционирования ББС, а также преимуществах использования Wi-Fi сетей [4], рассматривается способ обнаружения местоположения объектов внутри помещений с использованием Wi-Fi-точек доступа беспроводных сетей [5], рассмотрены два основных метода позиционирования внутри помещений с помощью мобильного устройства: метод трилатерации сигналов Wi-Fi и метод радиоотпечатков [6].
В рассмотренных ресурсах представлена разного рода информация по теме так или иначе связанной с позиционированием ББС, приведены методы определения координат ББС, их описание и способ применения.
Так же предлагается решение от компании Cisco, в котором реализуется метод триангуляционного позиционирования, в результате которого можно получить очень высокую точность определения местоположения на объекте.
Развертывание системы такого рода с финансовой точки зрения несет серьезные затраты. В связи с этим существует необходимость разработки методов, позволяющих со сравнительно не дорогим способом развертывания, и относительно простым способом реализации, определить координаты злоумышленника. В рассмотренных выше ресурсах, подобного метода, удовлетворяющего данные критерии, нет.
Целью работы является повышение уровня защищенности беспроводных сетей, за счет оперативного определения местоположения БС
Для достижения цели решены следующие задачи:
- Разработана математическая модель определения местоположения базовой станции, на основе анализа уровня радиосигнала;
- Разработан алгоритм системы определения местоположения базовой станции;
- Разработано программное средство определения БПС.
В основе нашей математической модели лежит, метод триллатерации [2], заключающийся в том, что на основе полученных данных от трех и более устройств, возможно определить местоположения объекта с некоторой погрешностью.
Исходными данными математической модели являются:
- координаты трех точек измерения уровня сигала ББС;
- данные об уровне сигнала.

Рисунок 1. Графическое представления нахождения точек пересечения
Для определения местоположения ББС сперва нужно определить расстояние до трех точек измерения по уровню сигнала. В нашем случае роутеры имеют координаты (x1, y1), (x2, y2), (x3, y3) а объект – (x, y). Расстояния от роутеров до объекта равны d1, d2, d3 соответственно.

Далее выполним преобразование уравнений, и получим систему из 3 уравнений, применим выборку с помощью области допустимых значений, отбросим лишнее и у нас останутся 6 пар значений – 6 точек пересечений окружностей. Далее необходимо из шести точек выбрать три точки, расположенные ближе всего друг к другу. Это позволит нам локализовать выделенную на рисунке область пересечения всех трех окружностей. Последний этап – определение точных координат точки, находящейся в этом сегменте, для этого опишем вокруг него прямоугольник и определим координаты объекта наблюдения как точку пересечения диагоналей прямоугольника, в который вписан получившийся сегмент.
Для определения координат БПС нам необходимо выполнить следующий алгоритм (рисунок 4):
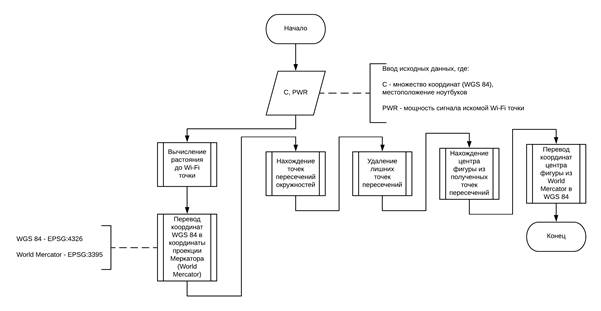
Рисунок 2. Схема алгоритма определения местоположения ложных точек доступа Wi-Fi
На первом шаге работы с данной программой необходимо задать координаты данного элемента системы определения местоположения точки доступа.
Далее необходимо выбрать на каждом узле системы идентификатор базовой станции Wi-Fi координаты которой будут определяться.
На следующем шаге указываем IP-адреса остальных ПК, участвующих в процесс определения местоположения БС. Далее нужно нажать на кнопку для начала измерений, обмена данными и вычисления местоположения БС.
В течении трех минут отображаются рассчитанные координаты БС.
Проведенные эксперименты определения местоположения БС показали, что оценка погрешности находится в диапазоне 7-15 метров.
В ходе разработки программы, мы руководствовались следующей структурной схемой:
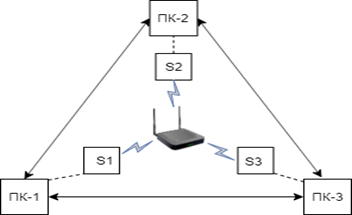
Рисунок 3. Структурная схема системы определения местоположения беспроводной базовой станции
Структурная схема системы определения местоположения узла беспроводной сети представлена на рисунке 5. На всех ПК устанавливается экземпляр данной программы. В процессе эксплуатации системы программы измеряют уровень радиосигнала от базовой станции с целью вычисления удаленности до неё. Далее программы осуществляют обмен данными между собой результатами измерений.
На основе определенных расстояний и известных координат узлов измерения рассчитывается местоположение точки доступа на основе метода трилатерации.
На рисунке 6 представлено главное окно программы. В центральной части экрана отображаются текущее состояние узла системы определения местоположения БС:
- параметры GPS/ГЛОНАСС-модуля;
- параметры выбранной базовой станции Wi-Fi;
- параметры служебной сети передачи данных;
- данные по каждому узлу системы определения местоположения БС.
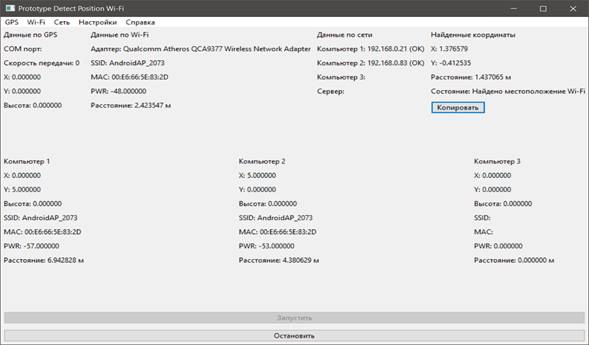
Рисунок 4. Главное меню программы
Для улучшения точности нахождения местоположения БС, пользователь может обратиться в пункт меню «Настройки», который отвечает за усреднение данных. Усреднение возможно по следующим методам: по средне арифметическому, по средне арифметическому с буфером, по минимальному (только PWR).
Пользователь может убедиться в получении координат по полю «Состояние», где будет отображено «Найдено местоположение Wi-Fi». В противном случае «Не найдено местоположение Wi-Fi».
